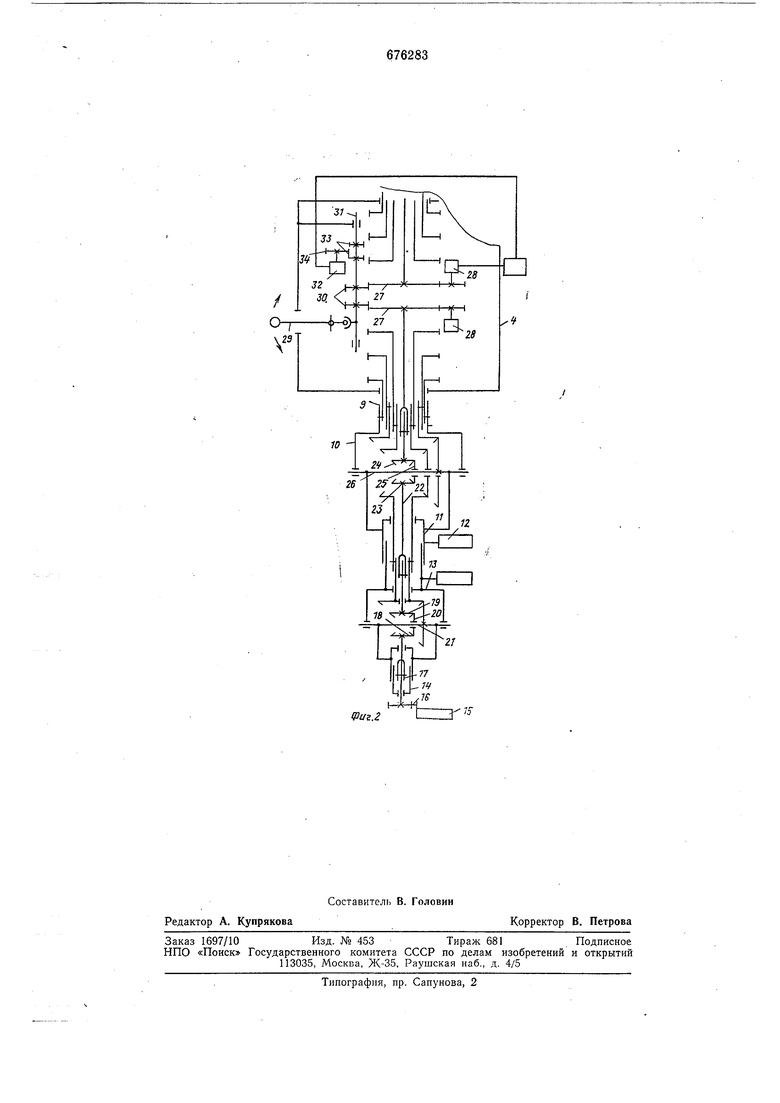
ским зубчатым колесом 19 через паразитные конические зубчатые колеса 20, свободно установленные на осях 21 локтевых шарниров 13.
Конические зубчатые колеса 19 жестко закреилены на телескопических осях 22, на других концах которых установлены конические зубчатые колеса 23, сцепленные с коническими зубчатыми колесами 24 через паразитные зубчатые конические колеса 25, свободно установленные на осях 26 плечевых шарниров 10.
Конические зубчатые колеса 24 жестко закреплены на центральных телескопических осях 9, на других концах которых установлены цилиндрические зубчатые колеса 27, постоянно сцепленные с датчиками 28 углового положения. При нейтральном положении рукоятки 29 (см. фиг. 2) цилиндрические зубчатые колеса 27 левых и правых телескопических штанг сцепляются между собой посредством зубчатых колес 30, жестко закрепленных на оси 31. При переводе рукоятки 29 в одно нз крайних положений (по стрелке) ось 31 смеш ается вверх или вниз, сцепляя одно нз цилиндрических зубчатых колес 27 с приводным электродвигателем 32 через цилиндрическое зубчатое колесо 30, ось 31 и зубчатые колеса 33, 34 н расцепляя другое зубчатое колесо 27.
Кинематические связи для передачи движений локтевого н плечевого суставов выполнены идентично кинематическим цепям передачи движений супинации пронации. Передача движений через паразитные конические зубчатые колеса, свободно установленные на осях локтевого и плечевого шарниров, исключает взаимное влияние движений (например, движения сгибания и разгибания в локтях на движение супинации и пронации на кистях).
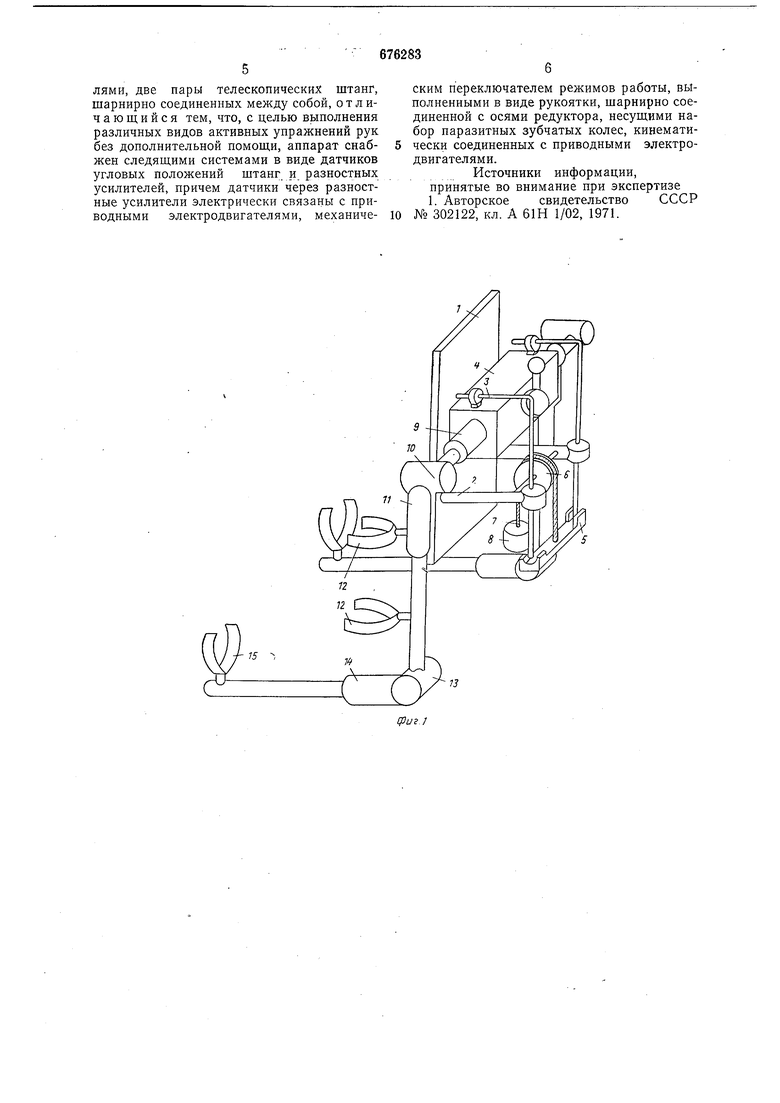
Для разработки движений в суставах рук пациент саднтся (или становится) спиной к спинке - основанию 1. Обе руки, здоровая и тренируемая, закрепляются с помошью держателей 12 предплечьями рук к телескопическим штангам 11, а держателями 15 кистями рук - к телескопическим штангам 14. Если для проведения механотерапии достаточно мышечных усилий здоровой руки, то рукоятка 29 ставится в нейтральное положение (см. фиг. 2), механически сцепляя между собой левые и правые телескопические штанги 11 и 14. Например, при совершении движений супинации (или пропинации) кистью здоровой руки последнее через держатель 15, цилиндрическое зубчатое колесо 16, телескопическую ось 17, конические зубчатые 18-20, телескопическую ось 22, конические зубчатые колеса 23-25, центральную телескопическую ось 9 поступает на выводное зубчатое колесо 27 телескопических штанг здоровой руки и дальше через жестко сидяш,ие на оси
31 цилиндрические зубчатые колёса 30 - на выводное цилиндрическое зубчатое колесо 27 телескопических штанг тренируемой руки, через центральную телескопическую ось 9, конические зубчатые колеса 25, 24, 23, телескопическую ось 22, конические зубчатые колеса 20, 19, 18, телескопическую ось 17, цилиндрическое зубчатое колесо 16 и держатель 15 передается па кисть тренируемой руки. Аналогичным образом нередаются движения локтевого н плечевого суставов со здоровой руки на тренируемую.
Если мышечных усилий здоровой руки оказывается недостаточно для проведения
механотерапии тренируемой руки, то рукоятку 29 переводят в одно из крайних положений. При этом телескопические штанги И, 14, связанные с тренируемой рукой, через кинематические цепи сцепляются с приводными электродвигателями. Например, для передачи движений супинации - пронации за счет смешения оси 31 зубчатое колесо 27 телескопических штанг, связанных с тренируемой рукой, сцепляется через цилиндрические зубчатые колеса 30, 33, 34 с электродвигателем 32 и датчиком 28 угловых нололсепий, а зубчатое колесо 27 телескопических штанг, связанных со здоровой рукой, - только с датчиком 28 углового положения. Датчики угловых положений, усилительные элементы - электронные или релейные усилители и приводные электродвигатели образуют следяшие системы. При различных положениях тренируемой и здоровой рук датчики угловых ноложений, связанные с соответствуюшими телескопическими штангами, также занимают различные угловые положения. При этом с каждой пары датчиков угловых положений (угловых датчиков каждого вида движений здоровой и тренируемой рук) на усилительные элементы подаются разностные сигналы, которые будучи усиленными поступают на приводные электродвигатели, разворачиваюшие датчики угловых ноложеннй и неремешаюш,их телескопические штанги И, 14 до тех пор, пока последние не займут одинаковых положений, т. е. тренируемая рука не займет положения, аналогичного положению здоровой руки.
Использование следяших приводов с датчиками углового положения позволяет путем смены полярности (фазы) питания датчиков углового положения на обратное изменить на обратное движение тренируемой руки по отношению к движению здоровой руки. Так, например, при совершении здоровой рукой движения супинации тренируемая будет совершать движение пронации.
Формула изобретения
Аппарат для разработки движений в суставах рук, содержаш;ий основание, элементы крепления конечностей, электропривод с редуктором и приводными электродвигателями, две пары телескопических штанг, шарнирно соединенных между собой, отличающийся тем, что, с целью выполнения различных видов активных упражнений рук без дополнительной помощи, аппарат снабжен следящими системами в виде датчиков угловых положений штанг н разностных усилителей, причем датчики через разностные усилители электрически связаны с приводными электродвигателями, механическим переключателем режимов работы, выполненными в виде рукоятки, шарнирно соединенной с осями редуктора, несущими набор паразитных зубчатых колес, кинематически соединенных с приводными электродвигателями.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 302122, кл. А 61Н 1/02, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат для разработки движений в суставах конечностей | 1979 |
|
SU876131A1 |
| Тренажер для укрепления верхних конечностей и туловища КУШЕТКА и способ его применения | 2022 |
|
RU2777248C1 |
| Тренажер для укрепления верхних и нижних конечностей и туловища ВЕЛОСИПЕДИСТ и способ его применения | 2023 |
|
RU2802147C1 |
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
| Способ восстановления функции кисти у пациентов с парезом верхней конечности | 2021 |
|
RU2767139C1 |
| Тренажер "Тележка вертикальная" и способ тренировки с его помощью | 2020 |
|
RU2742977C1 |
| Аппарат на кроватный для лечебной гимнастики нижней и верхней конечностей лежачих больных | 1957 |
|
SU114335A1 |
| Тренажер для реабилитации пациентов с нарушениями опорно-двигательного аппарата ЛЫЖИ и способ его применения | 2021 |
|
RU2751742C1 |
| ТРЕНИРОВОЧНОЕ УСТРОЙСТВО | 1990 |
|
RU2027423C1 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ С ПАРЕЗОМ ВЕРХНЕЙ КОНЕЧНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2114594C1 |