Изобретение относится к медицинской технике, а более конкретно - к области механотерапии верхних конечностей, и может быть использовано при разработке плечевых суставов в период их реабилитации после травм и при устранении последствий оперативного вмешательства.
Установление предшествующего уровня медтехники.
Сустав - подвижное сочленение двух и более костей скелета.
Предплечье - часть верхней конечности человека, ограниченная локтевым и лучезапястным суставами.
Плечевой сустав представляет собой подвижное соединение плечевой кости с лопаткой, связывающее свободную верхнюю конечность с поясом верхней конечности. Он позволяет выполнять следующие движения:
- сгибание и разгибание вокруг фронтальной оси;
- отведение и приведение вокруг сагиттальной оси;
- супинация и пронация (движение кнаружи и внутрь) вокруг вертикальной оси;
- круговые движения.
Известно устройство для разработки подвижности плечевого сустава [1], состоящее из тканевых лангет и эластичных шнуров, причем две тканевые лангеты для предплечья и плеча соединены между собой тесьмой на уровне локтевого сустава, при этом дистальный отдел лангеты для предплечья и проксимальный одел лангеты для плеча имеют крючки, прикрепленные к экспандеру или эластичному шнуру, перекинутому через блок, установленный на перекладине или потолке.
В таком устройстве задачей изобретения является снижение болевого синдрома при выполнении упражнений по восстановлению подвижности плечевого сустава. Она решается таким образом, что пациент, находясь первоначально в положении «сидя», выполняет физические упражнения по осям сустава по короткому рычагу и неполной амплитудой движения, затем переходит в положение «стоя» и выполняет физические упражнения уже по длинному рычагу, увеличивая амплитуду движения в плечевом суставе.
Недостаток данного устройства - отсутствие автоматизации при реализации процессов восстановления подвижности.
Известно также устройство для разработки подвижности плечевого сустава [2], содержащее:
- основание и сиденье для пациента,
- первой и второй вертикальные стойки,
- горизонтальное и сагиттальные штанги,
- механизм вращения,
- фиксатор предплечья,
- ложе для плеча, предплечья и кисти,
- систему блоков с грузом,
- вертикальные стойки, на которых закреплены сагиттальные штанги с установленным на них механизмом вращения с прикрепленным к нему ложем для плеча, предплечья и кисти, к которому посредством системы блоков закреплен груз,
- вертикальные стойки соединены посредством горизонтальной штанги с расположенным на ней фиксатором предплечья.
Данное устройство также характеризуется низкой автоматизацией процесса разработки плечевого сустава.
Известно также устройство для разработки подвижности плечевого сустава [3], содержащее:
- основание и сиденье пациента, жестко установленное на основании,
- вертикальную стойку, снабженную фиксатором положения и также установленную на основании,
- штурвал, установленный на свободном конце вертикальной стойки и имеющий возможность вращения в горизонтальной плоскости,
- и угловую шкалу, также установленную на вертикальной стойке, причем вертикальная стойка выполнена телескопической.
Недостаток данного устройства - отсутствие автоматизации процессов восстановления подвижности плечевого сустава.
Известно также устройство для разработки подвижности плечевого сустава [4], содержащее:
- основание и сиденье пациента,
- вертикальную стойку, установленную на основании с возможностью вращения вокруг вертикальной оси сиденья,
- индикатор угла поворота, соединенный с вертикальной стойкой гибкой связью,
- и U-образную штангу, шарнирно установленную на вертикальной стойке с возможностью поворота.
Данное устройство также характеризуется низкой автоматизацией процесса разработки плечевого сустава.
Известно устройство для разработки подвижности плечевого сустава [5], содержащее:
- жесткий пояс (тазобедренный упор), выполняющий функцию основания,
- два полубраслета (опоры или ложе) для плеча и для предплечья, снабженные пластинами,
- шаровые соединения, закрепленные на данных пластинах,
- распорки в виде телескопических трубок, расположенных перпендикулярно друг к другу.
Задачей данного устройства является обеспечение жесткой фиксации и динамической дистракции одновременно в плечевом и локтевом суставах.
Для профилактики и восстановления подвижности плечевого сустава придают верхней конечности максимально возможный угол отведения. При проведении лечебной физкультуры расположение стержня внутри трубки обеспечивает отведение-приведение, а шаровое соединение - сгибание-разгибание в плечевом суставе.
Главный недостаток данного устройства - отсутствие автоматизации процедуры восстановления подвижности плечевого сустава, что усложняет ее проведение.
Известно также устройство для разработки подвижности плечевого сустава [6], содержащее:
- основание (тазобедренный упор) с ремнями для затяжки на теле пациента,
- сферический подшипник, жестко закрепленный на основании,
- первую и вторую Г-образные штанги со сферическими головками в нижней части, причем одно плечо второй Г-образной штанги снабжено ложем для предплечья, а другое - рукояткой.
Перед выполнением процедур устройство закрепляют на теле пациента. Предплечье разрабатываемой руки укладывают в указанное ложе, а кисть здоровой руки располагают на рукоятке.
Пациент здоровой рукой, совершая сгибание-разгибание, приведение-отведение-вращение, приводит в аналогичное движение разрабатываемый плечевой сустав посредством передачи движения на него через штангу с рукояткой.
Таким образом, устройство позволяет обеспечить активную самостоятельную разработку плечевого сустава. Недостаток такого устройства - отсутствие автоматизации процедуры восстановления подвижности сустава, что усложняет ее проведение.
Известно также устройство для разработки подвижности плечевого сустава [7], содержащее:
- средства крепления к плечу и предплечью, шарнирно соединенные между собой,
- причем каждое средство крепления представляет собой параллельно установленные внутреннюю и наружную рамы, жестко соединенные между собой манжетами, при этом устройство снабжено механизмом сгибания-разгибания, выполненным в виде шарнирно соединенных с приводом и под углом друг с другом рычагов, каждый из которых своим свободным концом подвижно соединен с наружной рамой.
Данное устройство также характеризуется низкой автоматизацией процесса разработки плечевого сустава.
Известно также устройство для разработки подвижности плечевого сустава механотерапией [8], содержащее:
- два раскрывающихся рукава для проксимальных сегментов левой и правой верхних конечностей человека,
- П-образное основание, имеющее по центру спереди и сверху вырез для головы, при этом на передней части основания установлен электронный блок, управляющий реверсивными электроприводами,
- при этом каждый из них снабжен датчиком угла поворота выходного вала, обеспечивающим электронный блок информацией о работе электроприводов, из которых два предназначены для ротации левого и правого плечевых суставов (внутрь/кнаружи),
- два других электропривода предназначены для отведения/приведения левого и правого плечевых суставов.
Такое устройство характеризуется сложностью конструкции, необходимостью длительной перенастройки для пациентов с разными геометрическими параметрами.
Характеристика и критика прототипа.
Наиболее близким изобретением к предлагаемому по наибольшему количеству сходных признаков, технической сущности, схемному решению и достигаемому медико-техническому результату является устройство для разработки подвижности плечевого сустава, описанное в [9].
Такое устройство, выбранное в качестве прототипа, содержит:
- основание, выполненное в виде треноги, снабженной роликами для перемещения;
- сиденье пациента, установленное на поверхности пола (не показаны);
- выполненную регулируемой по высоте вертикальную стойку, закрепленную на основании и снабженную муфтой с фиксатором;
- первую трубу, размещенную внутри муфты, причем один конец данной трубы снабжен рукояткой, а другой ее конец - вилкой;
- платформу, снабженную угловой шкалой и шарнирно соединенную с вилкой;
- прикрепленную снизу к платформе вторую трубу, внутри которой установлен вал;
- реверсивный мотор-редуктор, размещенный на платформе и электрически соединенный с соответствующим выходом электронного блока управления, при этом механический выход мотор-редуктора кинематически связан с указанным валом;
- электронный блок управления, прикрепленный к вертикальной стойке;
- пульт управления, электрически соединенный с электронным блоком управления;
- и первую и вторую штанги, снабженные элементами крепления для фиксации разрабатываемой руки, при этом первая штанга жестко соединена со второй трубой, а вторая штанга подвижно соединена с валом через шлицы.
Данное устройство позволяет автоматизировать процедуру восстановления подвижности сустава только в одной плоскости, что снижает его терапевтические возможности.
Технический результат и его достижение
Изобретение направлено на достижение таких медико-технических результатов, как:
- расширение терапевтических возможностей устройства путем автоматизации процедуры восстановления подвижности плечевого сустава в двух плоскостях;
- повышение автоматизации процедуры лечения плечевого сустава и облегчение тем самым труда медработника.
Достижение таких результатов обеспечивается тем, что известное устройство для разработки подвижности плечевого сустава, содержащее:
- основание, снабженное роликами для перемещения;
- сиденье пациента, размещенное на основании;
- вертикальную стойку, выполненную регулируемой по высоте;
- электронный блок управления, прикрепленный к основанию;
- пульт управления, электрически соединенный с электронным блоком управления;
- первый реверсивный мотор-редуктор, электрически соединенный с соответствующим выходом электронного блока управления;
- и первую и вторую штанги; содержит также:
- второй реверсивный мотор-редуктор, электрически соединенный с соответствующим выходом электронного блока управления;
- первый и второй датчики угла поворота, роторы которых жестко связаны с выходными валами соответственно первого и второго реверсивных мотор-редукторов, а их электрические выходы подключены к соответствующим входам электронного блока управления;
- два регулятора положения, снабженные каждый угловой шкалой с фиксатором и прикрепленные с разных сторон к сиденью пациента;
- узел размещения здоровой руки, установленный на одном из регуляторов положения и состоящий из подлокотника с установочным штырем и его фиксатором;
- узел размещения разрабатываемой руки, образованный третьей штангой, в средней части которой имеется лоток, а на концах данной штанги размещены соответственно локтевой упор и рукоятка;
- и Г-образный рычаг, один конец которого механически связан со вторым мотор-редуктором, а другой его конец соединен с третьей штангой;
- один конец первой штанги кинематически связан с выходом первого реверсивного мотор-редуктора, а другой ее конец через шарнир соединен с одним концом второй штанги, на другом конце которой размещен второй реверсивный мотор-редуктор;
- при этом на другом регуляторе положения установлена вертикальная стойка, на верхнем конце которой размещен первый реверсивный мотор-редуктор;
- а первая и третья штанги выполнены регулируемыми по длине.
Кроме тог:
- к локтевому упору снаружи прикреплен электровибратор, выполненный в виде электрически соединенного с электронным блоком управления электродвигателя постоянного тока, на вал которого насажен эксцентрик;
- первый и второй датчики угла поворота выполнены каждый в виде потенциометрических (переменных) резисторов;
- электронный блок управления имеет разъем для Flash-карты и снабжен звуковым сигнализатором;
- пульт управления имеет гнездо, прикрепленное к торцу подлокотника;
- а шарнир между первой и второй штангами также снабжен угловой шкалой.
Заявителем не обнаружены устройства, в которых указанный медико-технический результат достигнут аналогичной совокупностью существенных признаков. При этом проведенный заявителем анализ уровня техники, включающий поиск по патентным и другим научно-техническим и медико-техническим источникам информации и выявление источников, содержащих сведения об аналогах изобретения, позволили установить, что не имеются аналоги, характеризующиеся признаками, идентичными всем существенным признакам изобретения, а выделение из перечня аналогов прототипа [9] обеспечило выявление совокупности существенных по отношению к техническому результату отличительных признаков заявленного изобретения.
Другими словами, по имеющимся у заявителя сведениям аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявляемого устройства, отсутствуют.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого медико-технического результата.
Заявителем проведена также проверка соответствия указанной совокупности существенных признаков устройства трем условиям (критериям) патентоспособности.
Соответствие заявляемого устройства условию патентоспособности «новизна»
Для оценки новизны технического решения проанализирована вышеприведенная совокупность существенных признаков заявляемого устройства. Для этого выделены те его признаки, которые совпадают с признаками прототипа, а именно, устройство содержит:
- основание, снабженное роликами для перемещения;
- сиденье пациента, размещенное на основании;
- вертикальную стойку, выполненную регулируемой по высоте;
- электронный блок управления, прикрепленный к основанию;
- пульт управления, электрически соединенный с электронным блоком управления;
- первый реверсивный мотор-редуктор, электрически соединенный с соответствующим выходом электронного блока управления;
- и первую и вторую штанги.
Если выделить те признаки, которые отличают заявляемое устройство от прототипа [9], то заявляемое устройство содержит:
- второй реверсивный мотор-редуктор, электрически соединенный с соответствующим выходом электронного блока управления;
- первый и второй датчики угла поворота, роторы которых жестко связаны с выходными валами соответственно первого и второго реверсивных мотор-редукторов, а их электрические выходы подключены к соответствующим входам электронного блока управления;
- два регулятора положения, снабженные каждый угловой шкалой с фиксатором и прикрепленные с разных сторон к сиденью пациента;
- узел размещения здоровой руки, установленный на одном из регуляторов положения и состоящий из подлокотника с установочным штырем и его фиксатором;
- узел размещения разрабатываемой руки, образованный третьей штангой, в средней части которой имеется лоток, а на его концах размещены соответственно локтевой упор и рукоятка;
- и Г-образный рычаг, один конец которого механически связан со вторым мотор-редуктором, а другой конец соединен с третьей штангой;
- один конец первой штанги кинематически связан с механическим выходом первого реверсивного мотор-редуктора, а другой ее конец через шарнир соединен с одним концом второй штанги, на другом конце которой размещен второй реверсивный мотор-редуктор;
- при этом на другом регуляторе положения установлена вертикальная стойка, на верхнем конце которой размещен первый реверсивный мотор-редуктор;
- а первая и третья штанги выполнены регулируемыми по длине.
Кроме того:
- к локтевому упору снаружи прикреплен электровибратор, выполненный в виде электрически соединенного с электронным блоком управления электродвигателя постоянного тока, на вал которого насажен эксцентрик;
- первый и второй датчики угла поворота выполнены каждый в виде потенциометрических (переменных) резисторов;
- электронный блок управления имеет разъем для Flash-карты и снабжен звуковым сигнализатором;
- пульт управления имеет гнездо, прикрепленное к торцу подлокотника;
- а шарнир между первой и второй штангами также снабжен угловой шкалой.
Наличие указанных признаков обеспечивает соответствие всей совокупности существенных признаков условию патентоспособности «новизна». При этом не обнаружены устройства, в которых медико-технический результат достигнут аналогичной совокупностью существенных признаков.
По имеющимся у заявителя сведениям совокупность существенных признаков, характеризующих сущность заявленного изобретения, неизвестна, что позволяет сделать вывод о соответствии ее условию патентоспособности «новизна» по действующему законодательству.
Соответствие заявляемого устройства условию патентоспособности «изобретательский уровень».
Для проверки соответствия требованию изобретательского уровня заявителем проведен дополнительный поиск и анализ решений с целью выявления признаков, совпадающих с отличительными от выбранного прототипа, результаты которого показали, что заявленный объект явным образом не следует из известного уровня техники, определенного заявителем.
Другими словами, сравнение заявляемого устройства не только с прототипом, но и с другими техническими решениями в данной и смежных областях медицинской техники показало, что последние не содержат признаков, сходных с признаками, отличающими заявляемое устройство от прототипа.
Следовательно, заявляемый объект соответствует условию патентоспособности «изобретательский уровень» по действующему законодательству.
При этом также следует отметить, что между совокупностью существенных признаков (отличительными признаками) настоящего изобретения и достигаемым медико-техническим результатом существует причинно-следственная связь, поскольку отличительные признаки не были выявлены ни в одном из аналогов, а достигаемый результат получается лишь при совместном использовании всех без исключения известных и отличительных признаков.
Таким образом, указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого медико-технического результата.
Раскрытие сущности изобретения. Пример конкретного выполнения. Чертежи, поясняющие конструкцию, принцип действия и работу устройства.
Чертежи:
- на фиг. 1 показан общий вид устройства;
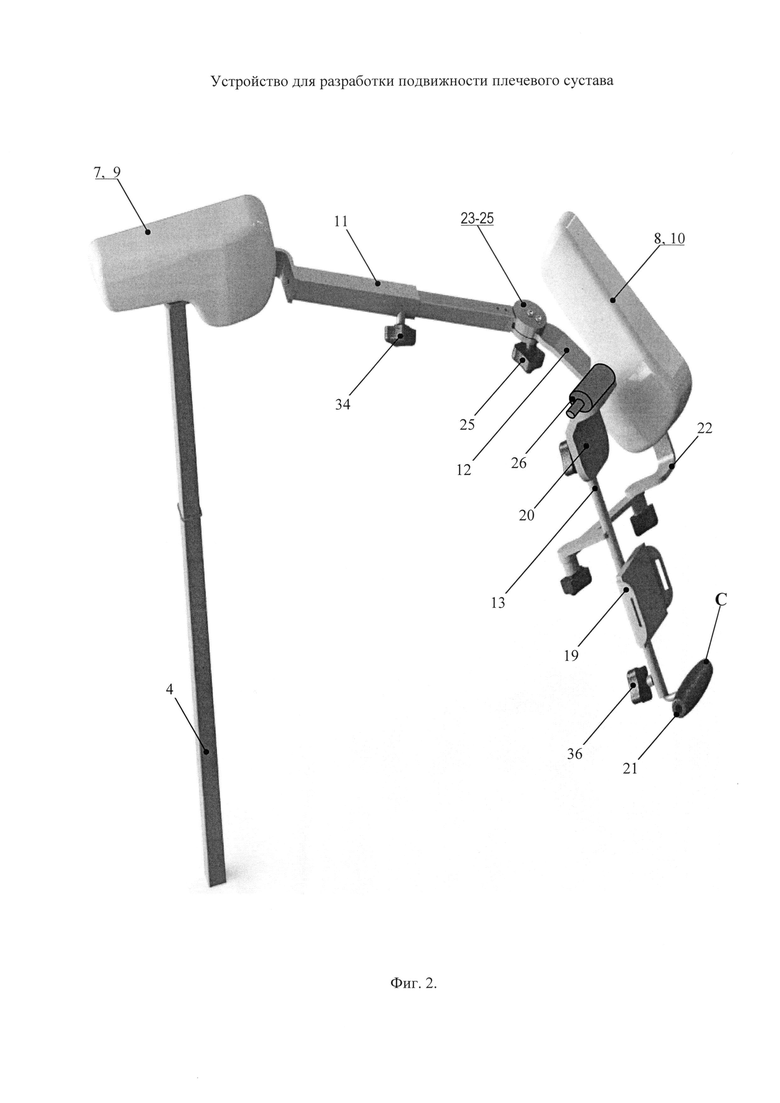
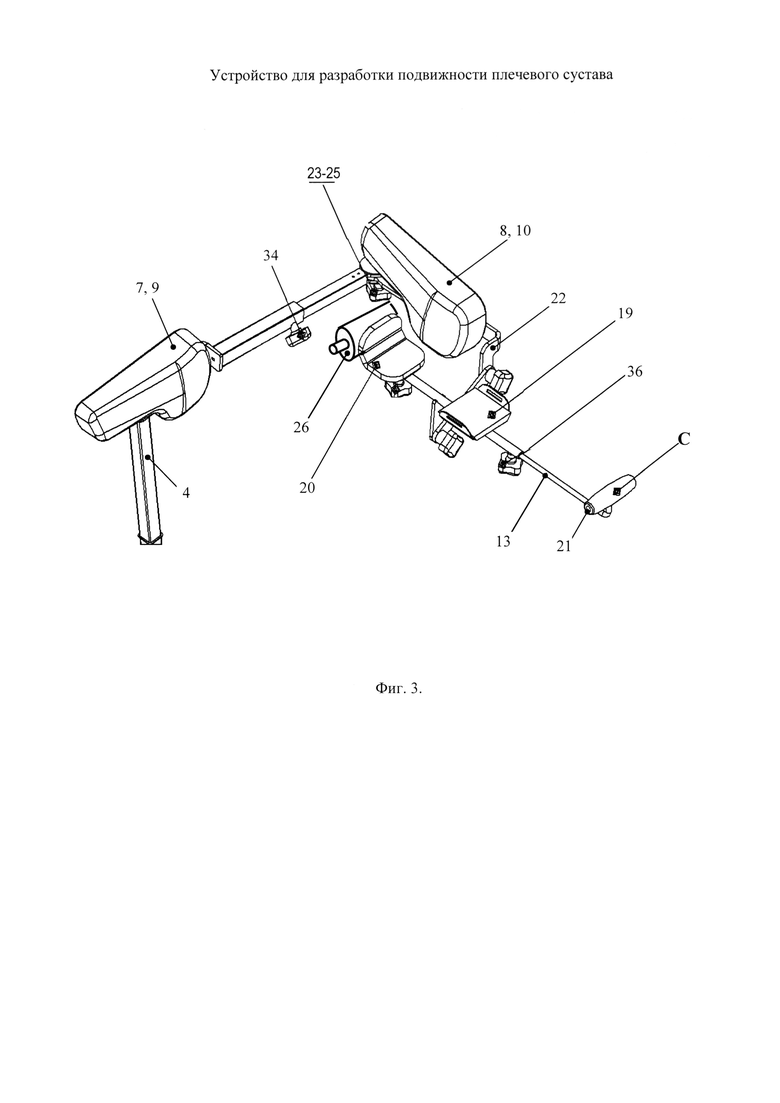
- на фиг. 2 и 3 приведены конструктивные схемы формирователя механических колебаний устройства (под различными ракурсами);
- на фиг. 4 показаны основные механические и электрические связи устройства;
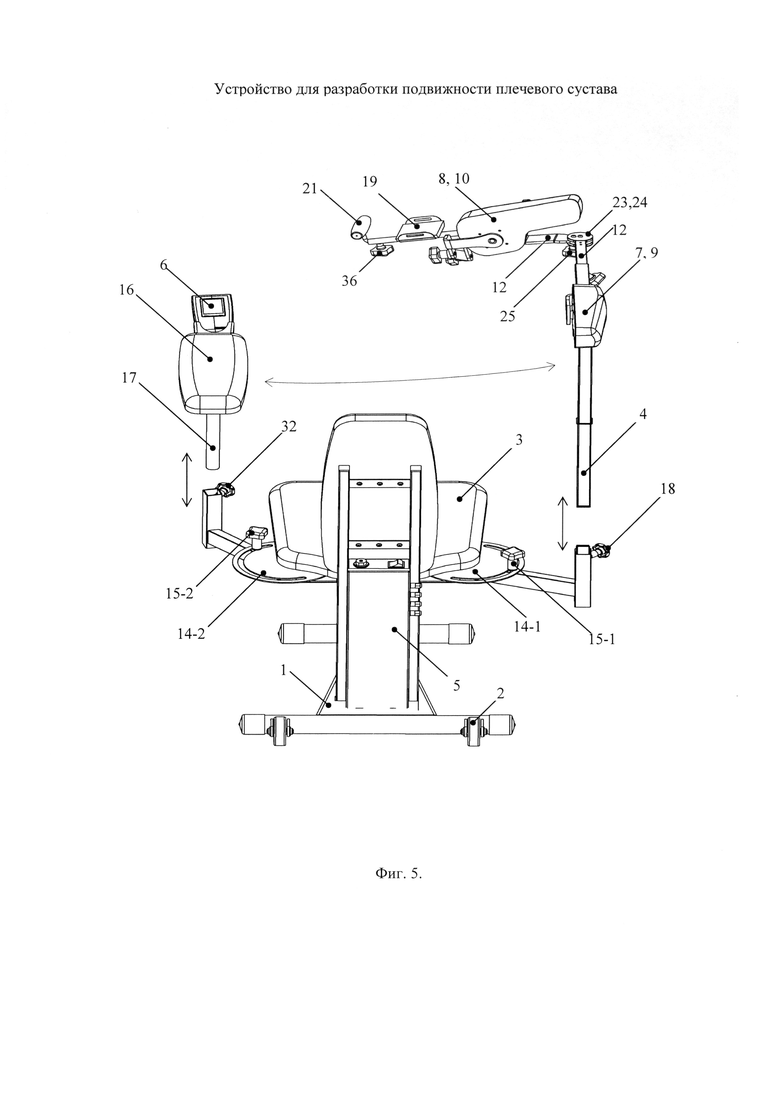
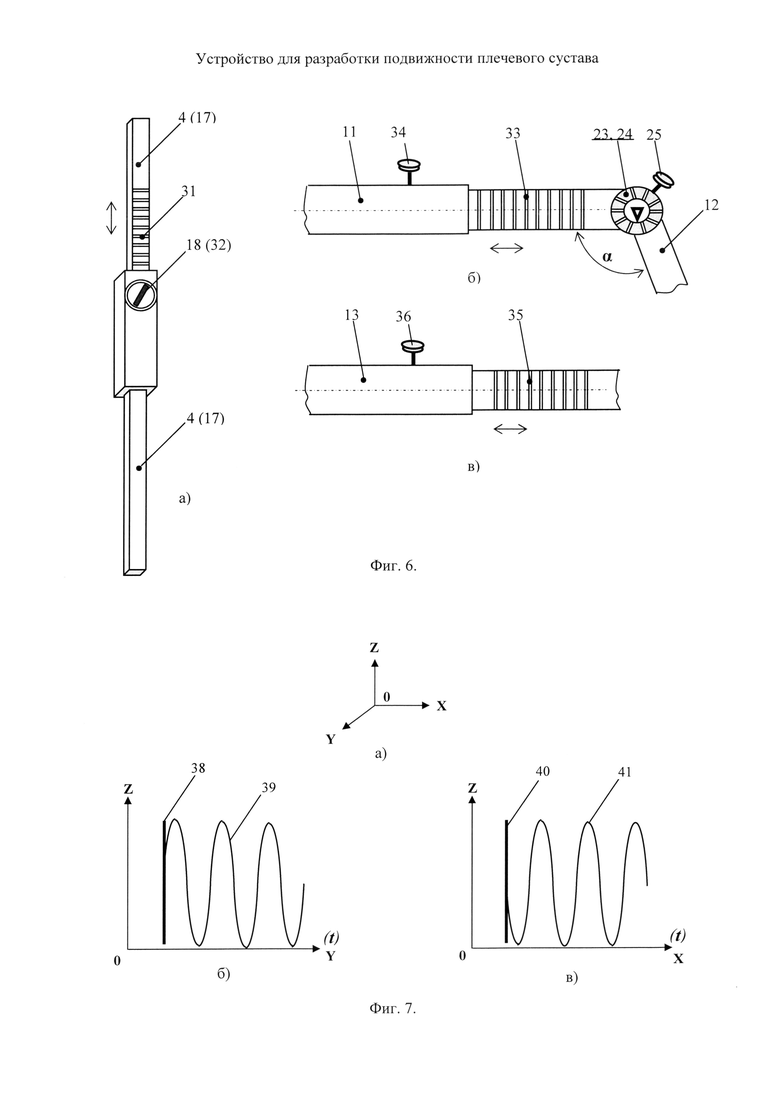
- фиг. 5 и 6 поясняют регулировку основных узлов устройства;
- на фиг. 7 показана траектория перемещения некоторой точки «С» на рукоятке во время работы устройства.
Описание конструкции устройства (в статике).
Устройство для разработки подвижности плечевого сустава содержит (фиг. 1):
- основание 1, снабженное роликами 2 для его перемещения,
- сиденье 3 пациента, установленное на основании 1,
- вертикальную стойку 4, выполненную регулируемой по высоте,
- электронный блок 5 управления, прикрепленный к основанию 1,
- пульт 6 управления, электрически соединенный с блоком 5 управления,
- первый 7 и второй 8 реверсивные мотор-редукторы, электрически соединенные с соответствующими выходами электронного блока 5 управления,
- первый 9 и второй 10 датчики угла поворота, роторы которых жестко связаны с выходными валами соответственно первого 7 и второго 8 мотор-редукторов (фиг. 4), а их электрические выходы подключены к соответствующим входам электронного блока 5 управления,
- первую 11, вторую 12 (фиг. 2) и третью 13 штанги, из которых первая 11 и третья 13 выполнены регулируемыми по длине;
- прикрепленные с разных сторон к сиденью 3 первый и второй регуляторы положения, причем первый регулятор снабжен угловой шкалой 14-1 с фиксатором 15-1 угла, а второй регулятор (фиг. 5) имеет угловую шкалу 14-2 с фиксатором 15-2 угла,
- узел размещения здоровой руки (фиг. 1), установленный на одном из регуляторов положения и состоящий из подлокотника 16 с установочным штырем 17 и его фиксатором 18 высоты,
- узел размещения разрабатываемой руки (фиг. 2, 3), образованный третьей штангой 13, в средней части которой имеется лоток 19, а на концах ее размещены соответственно локтевой упор 20 и рукоятка 21,
- Г-образный рычаг 22, один конец которого механически связан со вторым мотор-редуктором 8, а другой его конец соединен с третьей штангой 13.
Один конец штанги 11 кинематически связан с выходом мотор-редуктора 7, а другой ее конец через шарнир 23 соединен с одним концом штанги 12, на другом конце которой размещен второй мотор-редуктор 8. При этом шарнир 23 снабжен угловой шкалой 24 с фиксатором 25.
На другом регуляторе положения (фиг. 1) установлена вертикальная стойка 4, на верхнем конце которой размещен мотор-редуктор 7.
К локтевому упору 20 с наружной стороны прикреплен (фиг. 2, 3) электровибратор 26, выполненный в виде электрически соединенного с блоком 5 управления электродвигателя постоянного тока, на вал которого насажен эксцентрик (не показан).
Первый 9 и второй 10 датчики угла поворота выполнены каждый в виде потенциометрических (переменных) резисторов (не показаны).
Электронный блок 5 управления имеет разъем 27 для Flash-карты 28 и снабжен звуковым сигнализатором 29.
Пульт 6 управления имеет установочное гнездо 30 (фиг. 1), закрепленное на торце подлокотника 16.
Для регулировки высоты формирователя механических колебаний вертикальная стойка 4 выполнена выдвигаемой (перемещаемой вверх-вниз) и снабжена линейной шкалой 31 и фиксатором 32 (фиг. 6).
Для регулировки длины правая часть первой штанги 11 выполнена выдвигаемой и снабжена линейной шкалой 33 и фиксатором 34 (фиг. 1, 5, б).
Для регулировки длины правая часть третьей штанги 13 также выполнена выдвигаемой и снабжена линейной шкалой 35 и фиксатором 36 (фиг. 6, в).
Формирователь механических колебаний устройства включает в себя: вертикальную стойку 4, мотор-редукторы 7 и 9, штанги 11-13, шарнир 23, Г-образный рычаг 22, локтевой упор 20, лоток 19 и рукоятку 21.
Для характеристики колебательных движений данного формирователя на поверхности его рукоятки 21 обозначена условная точка «С» (фиг. 2, 3). Проекции траекторий движения этой точки показаны на фиг. 7, б и 7, в.
Назначение и функции конструктивных элементов и узлов устройства.
Основание 1 является главным несущим и связующим конструктивным элементом устройства и предназначено для обеспечения его жесткости и устойчивости.
Ролики 2 основания 1 облегчают перемещение устройства внутри помещения. Для этого достаточно наклонить его назад так, чтобы центр тяжести устройства находился примерно над роликами 2.
Сиденье 3 предназначено размещения на нем пациента при выполнении лечебных процедур.
Вертикальная стойка 4 предназначена для регулирования высоты формирователя механических колебаний устройства над сиденьем 3.
Электронный блок 5 предназначен для приема и выдачи управляющих и информационных сигналов.
Пульт 6 управления предназначен для формирования и хранения программы работы устройства (кнопки его не показаны).
Реверсивные мотор-редукторы 7 и 8 обеспечивают формирование крутящих моментов на своих выходных валах.
Датчики 9 и 10 угла поворота преобразуют угловые смещения их роторов в соответствующие электрические сигналы. В качестве датчиков 9 и 10 могут быть использованы, например, прецизионные потенциометрические (переменные) резисторы, величина сопротивления которых пропорциональна соответствующим углам поворота их ротора. При этом конструктивно каждый из мотор-редукторов 7 и 8 может быть выполнен в едином корпусе с соответствующим датчиком 9 или 10 угла поворота.
Штанги 11-13 обеспечивают передачу механических усилий в устройстве (фиг. 4).
Первый и второй регуляторы положения предназначены для регулирования положения вертикальной стойки 4 вместе с формирователем механических колебаний, а также узла размещения здоровой руки в пространстве вокруг устройства.
Подлокотник 16 с установочным штырем 17 и его фиксатором 18 высоты предназначены для размещения здоровой руки пациента во время выполнения лечебной процедуры.
Штанга 13 вместе с размещенными на ней лотком 19, локтевым упором 20 и рукояткой 21 обеспечивают непосредственное механотерапевтическое воздействие на верхнюю конечность пациента.
Г-образный рычаг 22 предназначен для передачи механического усилия от мотор-редуктора 8 к штанге 13.
Шарнир 23 вместе с фиксатором 25 предназначены для передачи механического усилия от штанги 11 на штангу 12 «под углом».
Электровибратор 26 формирует (при необходимости) вибрационные колебания, предназначенные для лечебного воздействия на плечевой сустав 37 (фиг. 4).
Указанные выше фиксаторы 15, 18, 25, 32, 34, 36 используются при «подгонке» конструкции устройства к геометрическим параметрам пациента.
Съемная Flash-карта 28 обеспечивает хранение дополнительной информации при разработке плечевого сустава.
Звуковой сигнализатор 29 предназначен для звукового информирования пациента и обслуживающего медработника о работе описываемого устройства. В частности, он формирует звуковые сигналы при:
- запуске устройства;
- возникновении аварийной ситуации;
- завершении лечебной процедуры;
- для формирования других предупредительных сигналов.
Описание устройства (в динамике).
Лечебная процедура основана на выполнении под воздействием устройства сгибательно-разгибательных и круговых движений верхней конечности.
а) подготовка пациента к процедурам.
Желательно, чтобы перед выполнением процедур пациент был одет в облегченный спортивный костюм. Рекомендуется также разработку сустава начинать после небольшой физиопроцедуры (разминки).
б) подготовка устройства к процедурам.
Перед выполнением процедур устройство должно быть установлено на ровной горизонтальной поверхности. Для облегчения перемещения его наклоняют назад так, чтобы центр тяжести устройства оказался примерно над роликами 2.
Пациент садится на сиденье 3. После этого устройство настраивают так, чтобы формирователь механических колебаний оказался со стороны разрабатываемой руки пациента, а подлокотник 16 - со стороны здоровой руки (фиг. 1).
Далее медработник, ослабив фиксаторы 15-1 и 18 (фиг. 1), регулирует положение подлокотника 16 в пространстве, размещает на нем здоровую руку пациента и затягивает фиксаторы 15-1 и 18.
После этого медработник, ослабив фиксатор 32, перемещает вертикальную стойку 4 вместе с формирователем механических колебаний вверх или вниз так, чтобы указанный формирователь оказался перед грудью пациента. Затягивает фиксатор 32.
Далее, ослабляя фиксаторы 34, 25 и 36, он регулирует длины штанг 11 и 13 и величину угла α и размещает на лотке 19 разрабатываемую руку так, чтобы локоть пациента упирался в упор 20, а его ладонь обхватывала рукоятку 21. Закрепляет фиксаторы 34, 25 и 36.
Подготовка пациента к процедурам завершается ознакомлением его с назначением кнопок пульта 6. Последний должен находиться в доступном для пациента месте (гнезде 30), чтобы, в случае необходимости, он мог оперативно прервать процедуру.
в) выполнение основной лечебной процедуры.
Перед его выполнением следует обратить особое внимание на то, чтобы в подвижные узлы устройства не могли попасть участки тела пациента и посторонние предметы (одеяла, подушки, кабели и т.п.).
Перед запуском процедуры, в зависимости от заболевания и состояния пациента, медработник определяет методику и режим лечебно-механического воздействия на плечевой сустав. В соответствии с этим через пульт 6 управления вводятся соответствующие программы разработки с учетом того, какая процедура будет осуществляться, а именно:
- режим, при котором включен только первый мотор-редуктор 7;
- режим, при котором включен только второй мотор-редуктор 8;
- режим, при котором включены одновременно оба мотор-редуктора 7 и 8.
Данные режимы могут осуществляться как при работе вибратора 26, так и тогда, когда он отключен.
Далее с помощью пульта 6 вводятся соответствующие параметры лечебной процедуры, в частности:
- последовательность включения мотор-редукторов 7 и 8, т.е. последовательность запуска указанных режимов работы устройства;
- частота вибрационных сигналов;
- время (длительность) процедуры;
- и др.
В устройстве каждое нажатие кнопок пульта 6 «подтверждается» звуковым сигналом сигнализатора 29, что необходимо для того, чтобы медработник и пациент обратили внимание на возможное случайное нажатие кнопки пульта 6.
г) режим работы устройства, при котором включен только первый мотор-редуктор 7 (т.е. мотор-редуктор 8 отключен).
С нажатием кнопки «Пуск» (не показана) сигнал с пульта 6 поступает в блок 5, который, в свою очередь, запускает мотор-редуктор 7. Вращение вала последнего начинает вращать ротор датчика 9, с выхода которого на соответствующий вход блока 5 управления начинают поступать электрические сигналы, соответствующие угловому смещению ротора датчика 9.
Одновременно под действием мотор-редуктора 7 первая штанга 11 вместе с остальными элементами формирователя механических колебаний, включая рукоятку 21, начинает совершать колебательные движения в вертикальной плоскости по одной и той же траектории. В частности, проекция траектории некоторой точки «С» на рукоятке 21 показана на фиг. 7,б в виде вертикальной (жирной) линии 38 (плоскость YOZ). Развертка во времени t такой траектории дана в виде синусоиды 39.
Таким образом, при данном режиме под действием совместных колебательных движений штанги 13, локтевого упора 20, лотка 19 и рукоятки 21 участок верхней конечности пациента от локтя до плечевого сустава 37пациента также совершает колебательные (лечебные) движения в вертикальной плоскости YOZ, обеспечивая разработку подвижности плечевого сустава 37 (фиг. 4).
Если включен электровибратор 26, к указанным колебательным движениям предплечья добавляются вибрационные колебания. Последние через локоть и плечевую кость передаются на плечевой сустав.
По истечении лечебной процедуры устройство останавливается, что сопровождается соответствующим звуковым сигналом сигнализатора 29.
д) режим работы устройства, при котором включен только второй мотор-редуктор 8 (т.е. мотор-редуктор 7 отключен).
С нажатием кнопки «Пуск» (не показана) сигнал с пульта 6 поступает в блок 5, который, в свою очередь, запускает мотор-редуктор 8. Вращение вала последнего начинает вращать ротор датчика 10, с выхода которого на соответствующий вход блока 5 управления начинают поступать электрические сигналы, соответствующие угловому смещению ротора датчика 10 (фиг. 4).
Одновременно под действием мотор-редуктора 8 Г-образный рычаг 22 вместе со штангой 13, локтевым упором 20, лотком 19, рукояткой 21 и размещенным на них предплечьем пациента начинает совершать колебательные движения в вертикальной плоскости по одной и той же траектории. В частности, проекция траектории некоторой точки «С» на рукоятке 21 показана на фиг. 7в в виде вертикальной (жирной) линии 40 (плоскость XOZ). Развертка во времени t такой траектории показана в виде синусоиды 41.
Таким образом, при данном режиме под действием совместных колебательных движений штанги 13, локтевого упора 20, лотка 19 и рукоятки 21 участок верхней конечности между локтем и ладонью пациента также совершает колебательные (лечебные) движения в вертикальной плоскости XOZ, обеспечивая разработку подвижности плечевого сустава 37, но уже в другой плоскости.
Если включен электровибратор 26, к указанным колебательным движениям добавляются вибрационные колебания. Последние через локоть и плечевую кость передаются на плечевой сустав.
По истечении лечебной процедуры устройство останавливается, что сопровождается соответствующим звуковым сигналом сигнализатора 29.
д) режим работы устройства, при котором включены оба мотор-редуктора 7 и 8. При этом может быть включен также электровибратор 26.
С нажатием кнопки «Пуск» (не показана) сигнал с пульта 6 поступает в блок 5, который, в свою очередь, запускает оба мотор-редуктора 7 и 8. Вращения их валов вращают роторы датчиков 9 и 10, с выхода которых на соответствующий вход блока 5 управления начинают поступать электрические сигналы, соответствующие угловому смещению роторов датчиков 9 и 10.
Работа устройства при данном режиме аналогична описанным выше режимам. Отличие заключается лишь в том, что разработка сустава производится одновременно в двух вертикальных плоскостях XOZ и YOZ, угол α между которыми может быть отличным от 90°. При этом одновременная работа обоих мотор-редукторов 7 и 8 приводит к тому, формирователь механических колебаний совершает движения по сложной (суммарной, объемной) траектории. Форма такой траектории определяется также соотношением скоростей вращения валов данных мотор-редукторов 7 и 8.
В зависимости от реакции пациента медработник может менять это соотношение.
Включение при этом электровибратора 26 вносит дополнительные изменения в указанную траекторию движения формирователя механических колебаний.
Таким образом, меняя параметры процедуры можно менять суммарное воздействие на плечевой сустав и тем самым выбирать наиболее оптимальные параметры лечения.
Послепроцедурные мероприятия
Послепроцедурные мероприятия проводятся под руководством медработника и могут включать в себя водные и воздушные процедуры, фитотерапию и др., которые завершаются послепроцедурным покоем.
Заявляемое устройство является механотерапевтическим средством, предназначенным для непрерывной пассивной разработки плечевого сустава. Он подразумевает выполнение больным суставом пассивных движений, которые совершаются благодаря описанному здесь устройству, при котором околосуставные мышцы избавлены от активных сокращений.
Основное преимущество описываемого метода лечения на основе данного устройства перед активной лечебной физкультурой - меньшее количество противопоказаний, так как больной сустав и соответствующая мышечная система испытывают существенно меньшие нагрузки, чем при лечебной физкультуре и каждый лечебный сеанс в устройстве сопровождается менее выраженными болезненными ощущениями.
В устройстве, благодаря тому, что блок 5 управления снабжен разъемом 27, появляется возможность записи результатов процедуры на Flash-карту 28, а также считывания с нее дополнительных лечебных программ по восстановлению подвижности плечевого сустава.
Достигаемые результаты.
Устройство предназначено для продолжительной пассивной разработки плечевого сустава. Область применения устройства - физиотерапевтические отделения больниц, поликлиник, реабилитационных центров. Оно может использоваться также в жилых помещениях, учебных и спортивных организациях, офисах, оздоровительных центрах, санаториях и других профилактических и лечебных учреждениях широкого профиля.
Соответствие заявляемого устройства условию патентоспособности «промышленная применимость».
По мнению заявителя сведения, приведенные в данном описании, достаточны для его осуществления. Такое устройство для восстановления подвижности плечевого сустава механотерапией не вызывает затруднений при его изготовлении, а возможность промышленного освоения заявляемого технического решения подтверждается, например, успешным изготовлением авторами различных вариантов его реализации.
Вышеизложенные сведения свидетельствуют для заявленного изобретения, как оно охарактеризовано в его формуле, о возможности его осуществления с помощью известных методов и средств, что позволяет сделать вывод о соответствии изобретения условию патентоспособности «промышленная применимость» по действующему законодательству.
Таким образом, заявляемое устройство отвечает всем трем условиям патентоспособности и обладает значительными преимуществами по сравнению с известными аналогами.
Использованные источники информации
1. Патент РФ №134050 на полезную модель «Блочное устройство для восстановления подвижности плечевого сустава» по кл. А61Н 1/00. Публ. 10.11.2013 г.
2. Патент Республики Беларусь №5645 на изобретение «Устройство для разработки плечевого сустава» по кл. А61Н 1/02. Публ. 30.12.2003 г.
3. Патент РФ №95515 на полезную модель «Устройство для разработки плечевого сустава» по кл. А61Н 1/00. Публ. 10.07.2010 г.
4. Авт. свид. СССР №1521479 на изобретение «Устройство для разработки плечевого сустава» по кл. А61Н 1/00. Публ. 15.11.1989 г.
5. Патент РФ №10337 на полезную модель «Устройство для профилактики лечения контрактур плечевого и локтевого суставов по кл. А61F 5/00. Публ. 16.07.1999 г.
6. Авт. свид. СССР №1047475 на изобретение «Устройство для механотерапии плечевого сустава» по кл. А61Н 1/02. Публ. 15.10.1983 г.
7. Патент РФ №2214210 на изобретение «Устройство для разработки движений в суставах» по кл. А61Н 1/02. Публ. 20.10.2003 г.
8. Патент РФ №155011 на полезную модель «Экзоскелет плечевых суставов» по кл. А61Н 1/02. Публ. 20.09.2015 г.
9. Авт. св. СССР №№302122 на изобретение «Электромеханический аппарат для разработки суставов» по кл. А61Н 1/02. Публ. 28.04.1971 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Механотерапевтическое устройство для разработки подвижности голеностопных суставов | 2017 |
|
RU2658760C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией | 2016 |
|
RU2641065C2 |
| СПОСОБ ФИКСАЦИИ ПАЦИЕНТА ДЛЯ ПРОВЕДЕНИЯ РОТАЦИОННОЙ ЛУЧЕВОЙ ТЕРАПИИ ГОРИЗОНТАЛЬНЫМ ТЕРАПЕВТИЧЕСКИМ ПУЧКОМ ПРОТОНОВ И УСТРОЙСТВО КРЕСЛА ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 1998 |
|
RU2149662C1 |
| Устройство для механотерапии позвоночника | 2015 |
|
RU2612842C1 |
| УСТРОЙСТВО ДЛЯ АКТИВНО-ПАССИВНОЙ РАЗРАБОТКИ ПЛЕЧЕВОГО СУСТАВА | 1990 |
|
RU2029535C1 |
| КРЕСЛО ДЛЯ МАССАЖА | 2009 |
|
RU2403005C1 |
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2005 |
|
RU2299046C1 |
| Тренажер для растяжения соединений костей ног и позвоночника человека | 2020 |
|
RU2773794C1 |
| Тренажер для реабилитации верхних конечностей и туловища РУЛЕВОЙ и способ его применения | 2023 |
|
RU2798356C1 |


Изобретение относится к медицине. Устройство для разработки подвижности плечевого сустава содержит основание, снабженное роликами для перемещения, сиденье пациента, размещенное на основании, вертикальную стойку, выполненную регулируемой по высоте, электронный блок управления, прикрепленный к основанию, пульт управления, электрически соединенный с электронным блоком управления, первый реверсивный мотор-редуктор, электрически соединенный с соответствующим выходом электронного блока управления, первую и вторую штанги, второй реверсивный мотор-редуктор, электрически соединенный с соответствующим выходом электронного блока управления, первый и второй датчики угла поворота, роторы которых жестко связаны с выходными валами соответственно первого и второго реверсивных мотор-редукторов, а их электрические выходы подключены к соответствующим входам электронного блока управления, два регулятора положения, снабженные каждый угловой шкалой с фиксатором и прикрепленные с разных сторон к сиденью пациента, узел размещения здоровой руки, установленный на одном из регуляторов положения и состоящий из подлокотника с установочным штырем и его фиксатором, узел размещения разрабатываемой руки, образованный третьей штангой, в средней части которой имеется лоток, а на концах данной штанги размещены соответственно локтевой упор и рукоятка, Г-образный рычаг, один конец которого механически связан со вторым мотор-редуктором, а другой его конец соединен с третьей штангой. Один конец первой штанги кинематически связан с выходом первого реверсивного мотор-редуктора, а другой ее конец через шарнир соединен с одним концом второй штанги, на другом конце которой размещен второй реверсивный мотор-редуктор. На другом регуляторе положения установлена вертикальная стойка, на верхнем конце которой размещен первый реверсивный мотор-редуктор. Первая и третья штанги выполнены регулируемыми по длине. Изобретение обеспечивает повышение автоматизации процедуры лечения плечевого сустава, а также расширение терапевтических возможностей устройства путем автоматизации процедуры восстановления подвижности плечевого сустава в двух плоскостях. 1 з.п. ф-лы, 7 ил.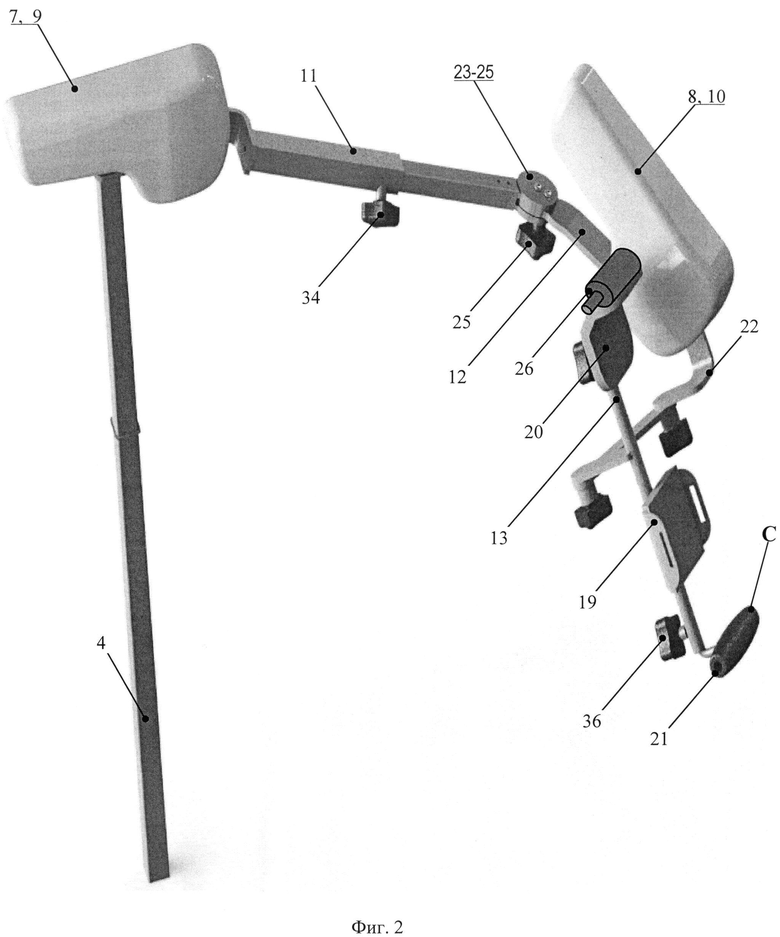
1. Устройство для разработки подвижности плечевого сустава, содержащее:
- основание, снабженное роликами для перемещения;
- сиденье пациента, размещенное на основании;
- вертикальную стойку, выполненную регулируемой по высоте;
- электронный блок управления, прикрепленный к основанию;
- пульт управления, электрически соединенный с электронным блоком управления;
- первый реверсивный мотор-редуктор, электрически соединенный с соответствующим выходом электронного блока управления;
- и первую и вторую штанги;
отличающееся тем, что содержит также:
- второй реверсивный мотор-редуктор, электрически соединенный с соответствующим выходом электронного блока управления;
- первый и второй датчики угла поворота, роторы которых жестко связаны с выходными валами соответственно первого и второго реверсивных мотор-редукторов, а их электрические выходы подключены к соответствующим входам электронного блока управления;
- два регулятора положения, снабженные каждый угловой шкалой с фиксатором и прикрепленные с разных сторон к сиденью пациента;
- узел размещения здоровой руки, установленный на одном из регуляторов положения и состоящий из подлокотника с установочным штырем и его фиксатором;
- узел размещения разрабатываемой руки, образованный третьей штангой, в средней части которой имеется лоток, а на концах данной штанги размещены соответственно локтевой упор и рукоятка;
- и Г-образный рычаг, один конец которого механически связан со вторым мотор-редуктором, а другой его конец соединен с третьей штангой;
- один конец первой штанги кинематически связан с выходом первого реверсивного мотор-редуктора, а другой ее конец через шарнир соединен с одним концом второй штанги, на другом конце которой размещен второй реверсивный мотор-редуктор;
- при этом на другом регуляторе положения установлена вертикальная стойка, на верхнем конце которой размещен первый реверсивный мотор-редуктор;
- а первая и третья штанги выполнены регулируемыми по длине.
2. Устройство по п. 1, отличающееся тем, что:
- к локтевому упору снаружи прикреплен электровибратор, выполненный в виде электрически соединенного с электронным блоком управления электродвигателя постоянного тока, на вал которого насажен эксцентрик;
- первый и второй датчики угла поворота выполнены каждый в виде потенциометрических (переменных) резисторов;
- электронный блок управления имеет разъем для Flash-карты и снабжен звуковым сигнализатором;
- пульт управления имеет гнездо, закрепленное к торцу подлокотника;
- а шарнир между первой и второй штангами также снабжен угловой шкалой.
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ДВИЖЕНИЙ В СУСТАВАХ ВЕРХНЕЙ КОНЕЧНОСТИ | 2000 |
|
RU2177295C1 |
| УСТРОЙСТВО ДЛЯ АКТИВНО-ПАССИВНОЙ РАЗРАБОТКИ ПЛЕЧЕВОГО СУСТАВА | 1990 |
|
RU2029535C1 |
| US 6676612 B1, 13.01.2004 | |||
| US 6695795 B2, 24.02.2004 | |||
| US 5179939 A1, 19.01.1993. | |||

