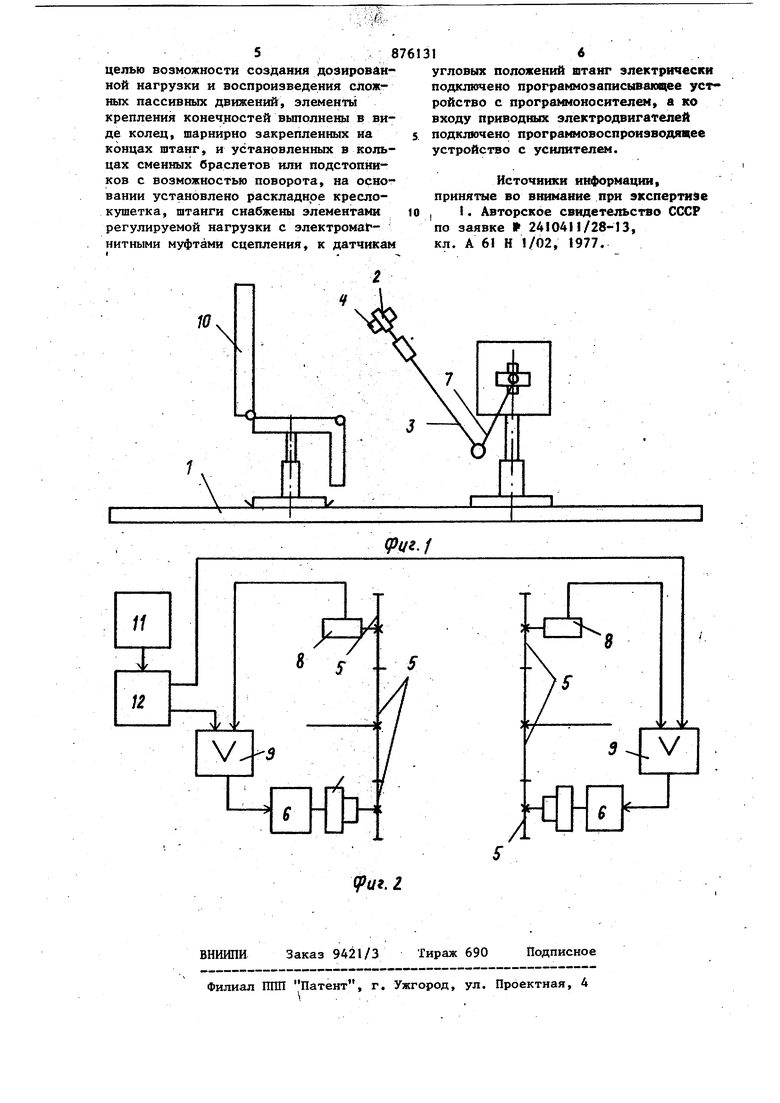
Изобретение относится к медицинской технике, а именно к ортопедии и травматологии. Известен аппарат для разработки движений в суставах конечностей, содержащий основание, элементы крейления конечностей, электропривод с редуктором и приводными электродвигателями, две пары штанг, шарнирно соединенных между собой, следящие системы, включающие датчики угловых поло жений штанг и разностные усилители, связанные с приводными электродвигателями . Однако известный аппарат не обеспе чивает дозированной нагрузки конечности при ее движении в том или ином направлении, полного затормаживания движений в определенных направлениях и возможности проведения сложных пассивных движений конечностей. Цель изобретения - возможность создания дозированной нагрузки и воспро изведения сложных пассивных движений Указанная цель достигается тем, что в аппарате для разработки движений в суставах конечностей, содержащем основание, элементы крепления конечностей, электропривод с редуктором и приводными электродвигателями, две пары штанг, шарнирно соединенных меж- . ду собой, следящие системы, включающие датчики угловых положений штанг и разностные усилители, связанные с . , приводными электродвигателями, элементы крепления конечностей вьшолнены в виде колец, шарнирно закрепленных на концах штанг, и установленных в кольцах сменных браслетов или подCTQnHHKOB с возможностью поворота, на основании установлено раскладное кресло-кушетка, штанги снабжены элементами регулируемой нагрузки с электромагнитными муфтами сцепления, к датчикам угловых положений штанг электрически подключено программозаписывающее устройство с программоносителем, а ко входу приводных элект-. родвигатепей подключено программовоспроизводящее устройство с усилителем На фиг, 1 - предлагаемый аппарат, общий вид; на фиг. 2 струтстурная схема аппарата.Аппарат содержит основание 1, элементы крепления конечностей, выполненные в виде колец 2, шарнирно эакрепленньпх на концах штанг 3, и установленных в кольцах 2 сменных браслетов 4 или подстопников (не показаны) с возможностью поворота, электропривода с редуктором 5 и приводными электродвигателями 6, две пары штанг 3 и 7, шарнирно соединенных между собой, следящие cHCTeNibi, включающие датчики 8 угловыхположений штанг .3 и 7 и разностные усшштели 9, связанные с приводными электродвигателями 6, на основании 1 установлено раскладное кресло-кушетка 10, штанги 3 и 7 снабжены элементами регулируемой нагрузки с электромагнитными муфтами сцепления (не показаны), к датчику 8 угловых положений штанг 3 и 7 электрически подключено программозаписы- . вающее устройство (не показано) с программоносителем 11, а ко входу приводных электродвигателей 6 подключено програМмовоспроизводящее устройство 12 с усилителем 9. Аппарат для разработки двителей в суставах конечностей работает следующим-образом. Для записи программы движений врач или тренер садится (ложится, становится) в кресло-кушетку 10, ему закрепляют в браслетах 4 или подстопниках парные конечности (например, рук), включают программозаписьшающее устройство и врач начинает делать руками необходимые для тренировки больного движения (например, движения супинации или пронации). Движения супинации (или пронации) с браслетом 4, жестко закрепленным в поворотных коль цах 2, передаются по кинематической цепи на датчики 8 углового положения выходы которых соединены с программозаписывающим устройством. Производится запись программь на программоносителе П (угловое положение датчиков во времени), после чего на кресло 10 садится (ложится, становится)пациент На парные крнечиости пациента, которым необходима разработка (например, руки), надеваю.т браслеты 4, жестко соединейные с поворотигыми кольцами 2 Включаются электромагнитные муфты обе ИХ конечностей, сцепляя приводные электродвигатели 6. Каждый из датчиков В подключается на вход усилителя 9, на другой вход которого подключается выход программозаписывающего устройства, а выход усилителя соединен с тем электродвигателем 6, который механически соединен с.датчиком 8 углового положения, выход которого соединен со входом усилителя 9, после чего включается программовоспроизводящее устройство 12. На вход усилительньк элементов поступает разностный сигнал между выходами программозадающего устройства и сигналами, поступающими с соответствующих датчиков 8 углового положения. Приводные электродвигатели 6 начинают вращать соответствующие датчики 8 до тех пор, пока разностный сигнал на входе усилителей 9 не станет равен нулю. При этом браслеты 4 с закрепленными в них конечностями (например, руками) принудительно совершают движения супинации (или пронации) согласно записанной программе. Скорость, с которой конечности пациента совершают движения, может меняться по усмотрению врача (или тренера) путем изменения скорости проигрывания записанной программы, при этом запись и воспроизведение на каждую пару штанг 3 и 7 может производиться, автономно, поэтому одна парная конечность может совершать движения отличные от другой. Предлагаемый аппарат обеспечивает создание дозированной нагрузки и воспроизведение сложных пассивных движений, записанных врачом в программное устройство, что значительно расширяет функциональные возь( .жности аппарата и его Применение в лечебной практику при восстановлении двигательных функций конечностей пациентов. Формула изобретения Аппарат для разработки движений в суставах конечностей, содержащий основание, элементы крепления конечностей, электропривод с редуктором и приводньми электродвигателями, две пары штанг, шарнирно соединенных между собой, следящие системы, включающие датчгаси угловых положений штанг и разностные усилители, связанные с приводными электродвигателями отличающийся тем, что, с
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат для разработки движений в суставах рук | 1976 |
|
SU676283A1 |
| Устройство для лечения деформации стопы | 1981 |
|
SU995780A1 |
| Аппарат для механотерапии нижней конечности | 1977 |
|
SU725666A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ | 1991 |
|
RU2005434C1 |
| Тренажер для растяжения соединений костей ног и позвоночника человека | 2020 |
|
RU2773794C1 |
| Устройство для извлечения спиц и штифтов при остеосинтезе | 1983 |
|
SU1106493A1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
| Устройство для разработки суставов конечностей | 1985 |
|
SU1243725A1 |
| Инъектор | 1985 |
|
SU1303166A2 |
