Часто представляет интерес устройство, дающее на выходе напряжение или ток, пропорциональные функции двух независимых переменных z=f(х, у), если величины x и y также задаются в устройстве в виде напряжений или токов. Устройство должно отвечать определенным требованиям в отношении статической и динамической погрешностей и позволять заменой детали, задающей какую-то одну определенную функцию, деталью того же типа, задающей какую-то другую определенную функцию, получать на выходе уже эту другую определенную функцию, например, φ(х, у).
Задание функции z=f(x, у) в форме какого-либо пространственного шаблона крайне неудобно. Гораздо проще задавать z=f(х, у) семейством кривых z=ψi(х), вычисленных для различных значений y1, y2, y3…, yi…, yn, причем второе переменное у выступает в данном случае в роли параметра. Чем гуще расположить отдельные кривые семейства в данной области, тем точнее можно найти значение z=ψi(x)=f(x, yi).
Настоящее изобретение разрешает поставленную задачу и заключается в устройстве для нахождения значений функции z=f(х, у), заданной семейством кривых, соответствующих различным значениям у.
В предлагаемом устройстве аналогично ранее известным, значения координат х, у задаются электрическими напряжениями, а для отработки координаты х используется потенциометр или иной подобный прибор.
Особенностью данного устройства является то, что для настройки его на данное значение у применен механизм, состоящий из вращающегося зеркала, фотоэлемента и аппарата, служащего для преобразования частоты импульсов тока фотоэлемента в постоянное напряжение, противопоставляемое значению y0. В случае наличия разности между этими противопоставляемыми величинами приводятся в движение посредством двигателя экран фотоэлемента и приспособление для отсчета значения функции.
На чертеже фиг. 1, 2 и 3 поясняют принцип действия предлагаемого автоматического устройства, фиг. 4, 5 и 6 изображают схематический вид в трех проекциях одного из возможных вариантов конструкции, фиг. 7 - схему устройства по другому конструктивному варианту, фиг. 8 - деталь устройства к варианту по фиг. 7.
Серия кривых z=ψi(x) вычерчивается тушью тонкими линиями на стеклянной пластинке подобно фиг. 1 (разумеется, без осей координат). В тех местах, где начерчены линии, пластинка непрозрачна. Заменяя в аппарате пластинку, на которой начерчена какая-то одна определенная функция f1(x, у), другой пластинкой, на которой начерчена какая-то другая определенная функция f2(x, у), можно осуществить изображение весьма широкого класса функций.
Функция f(х, у) должна быть ненепрерывна и однозначна по х (непрерывность по у не требуется), т.е. для любой ψi(x) не должно быть двух значений z, соответствующих одному и тому же значению х (разумеется ψi(х) получается из f(х, у) тогда, когда у придается некоторое постоянное значение yi).
Если нужно найти значение zi (фиг. 1), соответствующее значениям xi и yi, передвигая линейку параллельно оси oz, приходят в точку xi а пересечение линейки в точке м с кривой ψi(х), построенной для значения y=yi, позволит найти на прямой oz точку zi. Расстояние ozi представляет в каком-то масштабе требуемую величину zi.
Можно поступить и иначе (фиг. 2): ставят линейку в положение xi·м и надвигают экран э с помощью рейки и зубчатки с рукояткой р, до тех пор, пока край экрана э не совпадает с точкой м. Таким образом, во-первых, получают отсчет величины zi как отрезка ozi на прямой oz, а, во-вторых, отсчет той же величины zi от некоторого начального значения угла, как уже угловой величины на зубчатке, соединенной с рукояткой р. Это угловое положение нетрудно преобразовать в электрическую величину, которая и будет являться выходной величиной, даваемой устройством.
Величина xi вводится в устройство в виде электрической величины, преобразовываемой из механической величины отрезка oxi. Эту операцию можно выполнить, например, так, как показано на фиг. 3. Здесь величина х в форме напряжения поступает на клеммы 1 к 2. Линейка 8 с помощью рейки 9 получает поступательное движение от зубчатки 10, вращаемой через редуктор серводвигателем 7. На оси зубчатки 10 находится какой-нибудь аппарат отработки - в данном случае, например, потенциометр, концы которого 3 и 4 приключены к источнику напряжения. Движок 5, соединенный с зубчаткой 10, скользя по неподвижному потенциометру, снимает с последнего напряжение. Напряжение между клеммами 4 и 5 прямо пропорционально углу поворота зубчатки 10.
Разность входного напряжения х и напряжения отработки u (между клеммами 4 и 5) подается на усилитель 6, приводящий в действие серводвигатель 7. Если напряжение х больше напряжения отработки u, то серводвигатель 7 вращается в ту сторону, при которой u начинает увеличиваться; если же х меньше напряжения u, то серводвигатель 7 вращается в обратную сторону.
Ясно, что если входная величина xi не соответствует угловому положению зубчатки 10, а значит и положению на оси ох линейки 8, то создающаяся на входе усилителя 6 разность напряжений заставляет серводвигатель 7 вращаться, и линейка 8 движется до тех пор, пока разность напряжений на входе усилителя не станет равной (примерно) нулю, а значит, значение xi отрезка между началом о и линейкой станет точно пропорциональным входной величине xi.
Данный вариант преобразования электрической величины х в механическую показан лишь для примера. Любой современный тип автоматического потенциометра может быть использован в данном аппарате.
Таким образом, линейка 8 (фиг. 3) автоматически устанавливается так, что задается подходящая к аппарату величина xi. Отсчет величины zi получается с помощью преобразования каким-либо из известных способов (например, потенциометром, аналогичным потенциометру с клеммами 3, 4 и 5, посаженному на зубчатку 10) углового положения зубчатки 11 в электрическую величину. Остается автоматизировать самую трудную операцию - продвижение экрана э до тех пор, пока точка пересечения его ребра и линейки 8 не совпадет с точкой м пересечения ребра линейки 8 с той из кривых ψi(x), которой соответствует подводимая к устройству (и на фиг. 3 не показанная) некоторая величина уг.
Целесообразно, чтобы были начерчены кривые z=ψi(х), соответствующие равномерно отстоящим друг от друга значениям у (т.е., чтобы Δyi=yi-yi-1=const). В противном случае несколько усложнится конструкция одной из деталей устройства. Если же выполнено условие Δyi=const (а это в большинстве случаев нетрудно выполнить), то действие устройства становится вполне наглядным.
Обратимся к фиг. 1 и представим перемещение точки по отрезку xi. м от точки xi к точке м. Допустим, что первая кривая ψi(х), которая встретится на этом пути, соответствует какому-то у0, вторая, очевидно, - у0+Δу, третья y0+2Δy и т.д. Очевидно, i-я кривая соответствует y0+(i-1)y. Так как у0 и Δу постоянны, то можно написать.
yi=yo+(i-1)Δу=у′o+iΔy.
Отсюда видно, что число пересеченных на пути xi м линий i с точностью до постоянной у′0 пропорционально величине yi. (Если бы значения Δy были какими-то функциями у, то получился бы не закон прямой пропорциональности, а более сложная зависимость). Для того чтобы добиться величины у′0 одной и той же для всяких положений линейки 8, необходимо так начертить линии φi(х), чтобы каждая из них проходила на стеклянной пластинке до пересечения с линией oz. Если имеется непрерывность по х, то этого можно достичь (это недостижимо, если производная  принимает в точке х=0 бесконечное значение). Кроме того, для достижения большей точности желательно, чтобы в случае совпадения нескольких кривых φi(х) каком-либо участке (при различных значениях yi), они были бы начерчены не полностью совпавшими, а раздельными и очень близко лежащими друг к другу.
принимает в точке х=0 бесконечное значение). Кроме того, для достижения большей точности желательно, чтобы в случае совпадения нескольких кривых φi(х) каком-либо участке (при различных значениях yi), они были бы начерчены не полностью совпавшими, а раздельными и очень близко лежащими друг к другу.
Теперь понятно, как осуществить автоматизацию продвижения экрана э до точки м (фиг. 2). Для этого нужен прибор, который вычислял бы число кривых, пересекающих прямую мxi и не закрытых экраном э. Затем этот прибор должен (умножая число кривых n на Δу и прибавляя постоянную у′0) сравнивать nΔy+y′0 с подводимой к устройству величиной yi. Если окажется, что yi>nΔу+у′0, то это значит, что слишком мало линий не закрыто экраном э и он должен двигаться вверх (на фиг. 2 и 3). Если yi<<nΔy+y′0, то экран э должен двигаться вниз. Экран э должен двигаться до тех пор, пока остающееся не закрытое им число i линий, пересекающихся с линейкой, не будет таким, что  (при большом количестве линий на чертеже точность этого приближенного равенства можно сделать очень большой).
(при большом количестве линий на чертеже точность этого приближенного равенства можно сделать очень большой).
На фиг. 4, 5 и 6 показан в трех проекциях вид предлагаемого устройства по первому варианту конструкции.
Серия кривых z=φi(х) вычерчена тушью на стеклянной пластинке 1′. Свет от источника 2′, проходя через линзу 3′, и через незачерченные тушью места пластинки фокусируется с помощью плосковыпуклой цилиндрической линзы 4′ на оси вращающегося от мотора 6′ зеркала 5′. При каком-то определенном положении зеркала 5′ на призму 11 падает лишь пучок света от маленькой площадки 8′. Если зеркало 5′ вращается, то на фотоэлемент 13 поочередно проектируются то светлые, то темные (зачерненные тушью) площадки соответственно тому, изображение какой площадки при данном наклоне зеркала попадает в диафрагму коллиматора. Так как коллиматор и призма 11 расположены на легкой каретке, соответствующей линейке 8 на фиг. 2 и 3, то ясно, что на призму 11 поочередно проектируются все точки (вернее, все малые площадки) той прямой линии, которая соответствует линии xi м на фиг. 2 и 3. За полуоборот зеркала 5′ на призму 11 будут, следовательно, одна за другой помимо светлых площадок проектироваться и темные площадки. Параллельный пучок света поворачивается призмой 11 на 90° и попадает через двояковогнутую линзу 12 на фотоэлемент 13. Когда площадка 8′ совпадает с кривой z=ψi(x), на фотоэлемент проектируется темное пятно и возбуждения тока в нем не будет. Следовательно, за полуоборот зеркала 5′ в фотоэлементе столько раз прервется ток, сколько раз площадка 8′ пересечет кривые z=ψi(х). Число кривых, которые пересечет площадка 8′, определится положением экрана 7′, так как, пока площадка 8′ скользит по экрану (непрозрачному), никаких перемен освещенности фотоэлемента 13 не будет. Поэтому число импульсов за полуоборот, а при постоянной скорости мотора 6′ и число импульсов фототока в секунду пропорционально величине yi (без учета y′0), т.е. если экран стоит как раз на той кривой ψi(х), на которой он должен быть, то

Аппарат 18 представляет собой электронный частотомер, вернее, счетчик числа импульсов в секунду - прибор достаточно известный. Если на выход аппарата 18 подать напряжение, пропорциональное величине у, и так же, как в обычном автоматическом потенциометре, подать разность выходного напряжения аппарата 18 и у на усилитель 19, питающий мотор 20, то, если экран 7′ находится ниже, чем нужно, он движется вверх, а если выше, чем нужно, то движется вниз. Связанный с положением экрана 7′ аппарат 21 даст своим угловым положением (а если это сельсин или потенциометр, то фазой или напряжением) ту величину zi, которая должна быть получена при данных xi и yi.
Ось зеркала 5′, неподвижна, равно как и статор мотора 6′. Ширина зеркала 5′ должна превышать ширину стеклянной пластинки 1′, для того, чтобы в любом положении каретки х′ на коллиматор, расположенный на каретке, проектировались пучки света. Величина площадки 8′ регулируется отверстием коллиматора. Для отработки величины х служат аппарат 16, усилитель 15 и сервомотор 14.
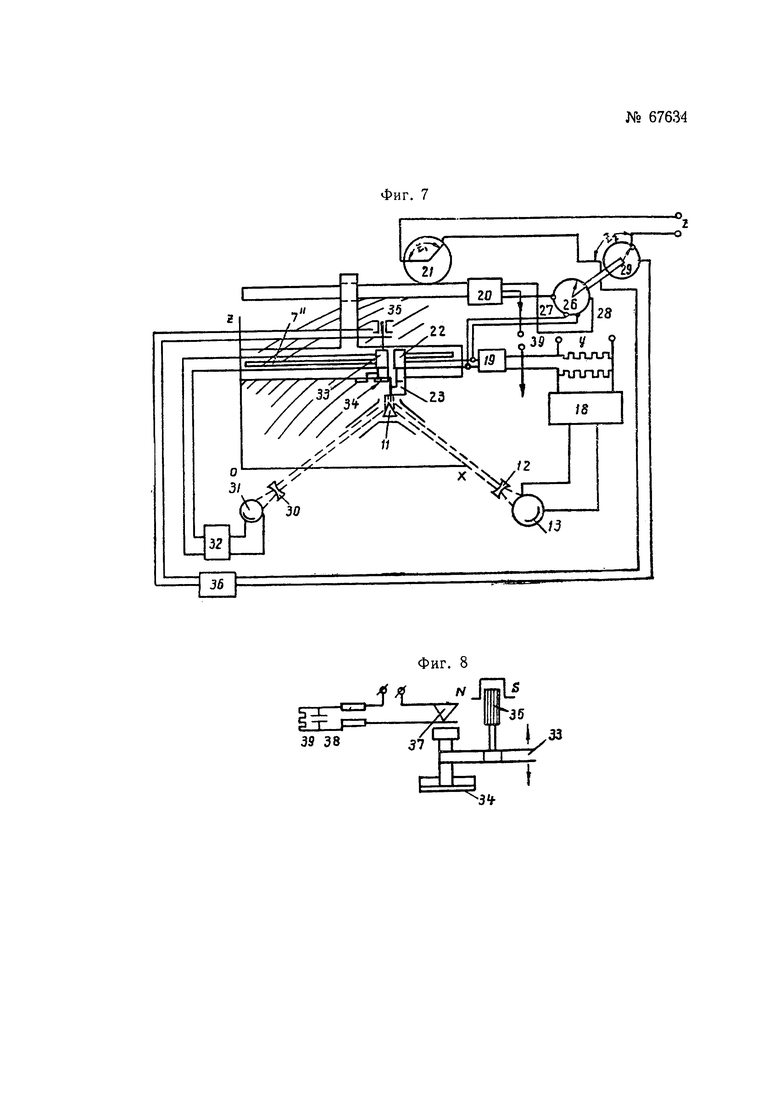
Схема устройства с повышенной точностью показана на фиг. 7. Здесь в устройство добавлен новый прибор, который можно назвать интерполятором. Он состоит из двух телеграфных или быстродействующих телефонных реле 22 и 33. Действие интерполятора основано на том, что при данных разностях Δyi и Δzi между соседними кривыми (при некотором xi=const) можно считать, что для небольших разностей δyi и δzi осуществляется равенство  т.е. предполагается прямолинейная зависимость z=η(y) при xi=const на участке от yi до yi+Δyi, что при небольших Δyi практически справедливо. Отношение
т.е. предполагается прямолинейная зависимость z=η(y) при xi=const на участке от yi до yi+Δyi, что при небольших Δyi практически справедливо. Отношение  находится следующим образом.
находится следующим образом.
Реле 22 питается через усилитель 19 от разности напряжения на выходе аппарата 18 и входной величины у. Предположим, что в данный момент реле 22 закрыло своим якорьком 23 еще одну кривую; тогда на выходе аппарата 18 будет слишком малое напряжение, и реле 22 получит импульс на открывание. Однако как только оно откроет кривую, напряжение выхода аппарата станет слишком большим (если истинное показание находится между кривыми) и реле 22 получит опять импульс на открывание. В результате якорек 23 начнет вибрировать и подвижное равновесие наступит тогда, когда в среднем за секунду якорек 23 будет закрывать кривую как раз настолько, чтобы было осуществлено равенство между средней величиной выхода частотомера и входной величиной.
Так как в это время установится и определенное среднее число импульсов в секунду, подаваемых с усилителя 19 на реле 22, а, значит, и определенный, пропорциональный δyi постоянный ток в его обмотке, то этот ток можно подать на прибор постоянного тока 26.
При этом, если δyi=0, то кривая будет всегда закрыта, ток через прибор 26 будет равен нулю, а его стрелка будет в контакте с ламелью 27. Если δу=Δyi, то (при неподвижном роторе мотора 20) кривая всегда будет открыта, ток, проходящий через прибор 26, будет максимален, а его стрелка будет находиться в контакте с ламелью 28. Если же 0<iyi<Δyi, то стрелка прибора будет дрожать в некотором среднем положении, дающем отношение  Так как прибор 26 соединен с аппаратом (сельсин, потенциометр и т.п.) 29 общим валом, то и стрелка последнего разделит свою шкалу в том же отношении.
Так как прибор 26 соединен с аппаратом (сельсин, потенциометр и т.п.) 29 общим валом, то и стрелка последнего разделит свою шкалу в том же отношении.
Чтобы узнать  необходимо знать величину Δzi. Это достигается вторым реле 33, с якорьком которого соединено легкое зеркало 34, повернутое на угол в 45° по отношению к горизонтальной плоскости. Световой пучок, отразившись от зеркала 34, пройдет на одно из зеркал 11. Оба световых пучка, исходящих от зеркал 5′ и 34, вместе составляют по ширине не более 1÷2 мм, причем на второй фотоэлемент 31 отражается только тот пучок, который идет от зеркала 34. Фотоэлемент 31 приключен к триггеру 32, который срабатывает всякий раз, когда ток в фотоэлементе падает до нуля, изменяя направление тока в обмотке реле 33 на обратное. Поэтому якорек реле 33 начинает вибрировать. Как только зеркало находит на зачерненную линию, реле получает обратный импульс, зеркало отходит обратно, находит на следующую зачерненную линию, поворачивает снова и т.д. В результате якорек вибрирует с амплитудой, равной Δzi; на якорьке находится легкая катушка 35, вибрирующая при этом в поле постоянного магнита. Ее э.д.с. усиливается усилителем 36 и подается на прибор 29, с которого, однако, снимается только часть данной величины, пропорциональная
необходимо знать величину Δzi. Это достигается вторым реле 33, с якорьком которого соединено легкое зеркало 34, повернутое на угол в 45° по отношению к горизонтальной плоскости. Световой пучок, отразившись от зеркала 34, пройдет на одно из зеркал 11. Оба световых пучка, исходящих от зеркал 5′ и 34, вместе составляют по ширине не более 1÷2 мм, причем на второй фотоэлемент 31 отражается только тот пучок, который идет от зеркала 34. Фотоэлемент 31 приключен к триггеру 32, который срабатывает всякий раз, когда ток в фотоэлементе падает до нуля, изменяя направление тока в обмотке реле 33 на обратное. Поэтому якорек реле 33 начинает вибрировать. Как только зеркало находит на зачерненную линию, реле получает обратный импульс, зеркало отходит обратно, находит на следующую зачерненную линию, поворачивает снова и т.д. В результате якорек вибрирует с амплитудой, равной Δzi; на якорьке находится легкая катушка 35, вибрирующая при этом в поле постоянного магнита. Ее э.д.с. усиливается усилителем 36 и подается на прибор 29, с которого, однако, снимается только часть данной величины, пропорциональная

Основной аппарат 21 должен в таком случае указывать только то значение z, при котором экран 7′′ находится на точке пересечения прямой xi=const с какой-либо из кривых семейства. Последнее достигается телефонными контактами 37, соединенными с источником тока и емкостью 38 (фиг. 8). Если вибратор 33 не достигает контактов 37, то мотор 20 получает импульс в такую сторону, чтобы замыкания происходили.
Если замыкания происходят часто, то мотор получает импульсы в обратную сторону. Поэтому экран 7′, соединенный жестко с контактами 37, дрожит на такой точке, при которой замыкания происходят редко. Так как крайнее положение якорька вибратора 33 связано с зачерненной линией, а положение контактов 37 жестко связано с положением экрана 7′, то можно регулировать устройство так, чтобы было получено почти жесткое соответствие пограничной линии экрана и контура зачерненной линии.
Того же можно достичь, применив специальный фотоэлемент с усилителем, причем, если ток фотоэлемента слишком мал, то мотору 20 дается импульс в одну сторону; если ток слишком велик, то дается импульс в другую сторону. Если ток имеет значение, находящееся в некоем среднем интервале, то нет импульсов ни в ту, ни в другую сторону (импульсы на мотор от прибора 26 должны во всяком случае превышать импульсы от этого добавочного устройства). Поэтому пограничная линия экрана 7′ будет отстоять от зачерненной кривой всегда на некоторое малое расстояние, которое может быть сделано порядка 0,1 мм, так что его изменения от изменения чувствительности фотоэлемента не будут играть никакой роли.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2012 |
|
RU2510500C1 |
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2000 |
|
RU2170446C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТОРСИИ В ИНТЕРФЕРОГРАММЕ ОПТИЧЕСКОЙ АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ | 2021 |
|
RU2773806C1 |
| Приспособление для отыскания невидимых невооруженным глазом летательных аппаратов | 1925 |
|
SU9343A1 |
| СПОСОБ ДИАГНОСТИКИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВОЙ ЧАСТИ МОСТОВЫХ КРАНОВ | 2008 |
|
RU2382347C1 |
| ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА ОТРАЖАТЕЛЬНОГО ТИПА | 1991 |
|
RU2048699C1 |
| СПОСОБ ПЕРЕДАЧИ ИЗОБРАЖЕНИЙ | 1931 |
|
SU38539A1 |
| Импульсный интегратор | 1949 |
|
SU87381A1 |
| Устройство для определения величины интеграла произведения двух функций | 1940 |
|
SU63866A1 |
| Устройство для определения координат цветности | 1973 |
|
SU473062A1 |


1. Автоматическое устройство для нахождения значений функции z=f(x, у), заданной семейством кривых, соответствующих различным значениям у, по значениям координат х и у, задаваемых в виде электрических напряжений, причем для отработки координаты x предусмотрен автоматический потенциометр или иной подобный прибор, отличающееся тем, что для перестановки устройства в зависимости от заданного значения у предусмотрен фотоэлектрический механизм, состоящий из вращающегося зеркала 5′, фотоэлемента 13 и аппарата 18, служащего для преобразования частоты импульсов тока фотоэлемента в постоянное напряжение, противопоставляемое значению у, и в случае наличия разности между ними для приведения в движение посредством двигателя 20 экрана 7′ и приспособления 21 для отсчета значения функций.
2. Форма выполнения устройства по п. 1, предназначенная для установки промежуточных между соседними кривыми значений у и отсчета функции путем интерполяции, отличающаяся тем, что для подачи добавочного числа импульсов фототока предусмотрен вибратор 22 с зеркалом 23, приводимым в действие от нескомпенсированной части напряжения у, и прибор 26, указывающий эту некомпенсированную часть, а для интерполяции z между двумя соседними кривыми применен второй вибратор 33 с зеркалам 34, совершающим колебания между двумя соседними кривыми и приводящим в колебания индукционную катушку, 35 с тем, чтобы приложенное к реохорду 29 напряжение было пропорционально приращению z между соседними кривыми, а положение движка этого потенциометра, связанного с прибором 26, соответствовало превышению координаты у над ее значением на ближайшей кривой.
