Изобретение относится к области диагностики технического состояния технологического оборудования, в частности мостовых кранов для восстановления их эксплуатационной пригодности в процессе ремонта.
Известно техническое решение способа диагностики геометрических параметров ходовой части мостовых кранов, заключающееся в том, что осуществляют остановку крана, выполняют измерения положения колес ходовой части и вычисляют их взаимное положение (Контроль геометрических параметров мостовых кранов во время эксплуатации//Межвуз. Сб. Новосиб. ин-т инж. геод., аэрофотосъемки и картогр. 1984, 22/62. с.111-115). Описанное техническое решение не обеспечивает получение объективной информации о геометрических параметрах ходовой части мостовых кранов.
Наиболее близким к заявляемому является способ диагностики геометрических параметров ходовой части мостовых кранов, заключающееся в том, что осуществляют остановку крана, так же установку на подкрановых путях геодезических средств измерений, выполнение их ориентирования, формирование, таким образом, базисных направлений и выполнение измерений положения колес ходовой части относительно сформированных базисных направлений и вычисление положения ходовых колес (Г.А.Шеховцов, Современные методы геодезического контроля ходовой части и путей мостовых кранов: Монография. - Н.Новгород: Нижегород. Гос. Арх. - строит. Ун-т, 1999 г., 99-105 с.).
Описанное техническое решение не обеспечивает получение объективной информации о геометрических параметрах ходовой части мостовых кранов. В силу того, что при наличии сверхнормативных разворотов (перекосов) колес, допущенных при монтаже, или наличии негативного сочетания допустимых разворотов (перекосов) в процессе движения крана его ходовая часть и рама крана претерпевают непрерывные изменения геометрических параметров. Остановка крана, контроль расположения его колес в данном положении характеризуют лишь уникальные геометрические параметры и не описывают ремонтопригодную геометрию.
Задачей заявляемого изобретения является исследование мостовых кранов и получение объективной информации о геометрических параметрах их ходовой части.
Сущность изобретения заключается в том, что в способе диагностики геометрических параметров ходовой части мостовых кранов, включающем остановку крана, так же установку на подкрановых путях геодезических средств измерений, выполнение их ориентирования, формирование, таким образом, базисных направлений и выполнение измерений положения колес ходовой части относительно сформированных базисных направлений и вычисление положения ходовых колес, при этом первоначально определяют предельные состояния крана, для этого геодезическим средством измерений, установленным в зоне балансиров, контролируют изменение геометрических параметров рамы крана и взаимного расположения балансиров и ходовых колес при прокатывании крана в одном из направлений вдоль путей, при этом остановку крана осуществляют в момент фиксации предельно-деформированного состояния его конструктивных элементов, зафиксировав предельное состояние, начинают движение в обратном направлении до регистрации противоположного критически деформированного состояния, зафиксировав два названных положения, выполняют исследование геометрических параметров конструктивных элементов крана в пределах данного интервала L с остановкой крана через интервалы ΔL=L/n, при каждой остановке крана контролируют форму и взаимное расположение главных и концевых балок, главных балансиров, балансиров и ходовых колес, при обработке результатов измерений вначале, для каждой остановки крана, вычисляют геометрические характеристики моста крана, то есть его линейные и угловые размеры, а также угол его разворота относительно оси подкрановых путей, после этого, для каждой остановки крана, вычисляют уклонения от оси подкрановых путей контролируемых точек расположенных на краях ходовых колес и балансиров, по этим результатам определяют перекосы и радиальные биения ходовых колес крана, в качестве итоговых результатов, характеризующих ремонтно-пригодную геометрию крана, принимают среднее значение, далее на основе вычисленных средних геометрических параметров разрабатывают рекомендации на восстановление нормативных характеристик ходовой части крана.
Предлагаемое техническое решение способа диагностики геометрических параметров ходовой части мостовых кранов реализует теорему, заключающуюся в том, что ремонтопригодная геометрия моста и ходовой части крана соответствует не напряженному его состоянию. Фактические геометрические характеристики крана описываются функцией
Fкi=ƒi k(xi,yi,zi)Тi,
или
Fki=ƒo k(xo,yо,zo)+ƒм к(Δx,Δy,Δz)м+ƒдeф к(δxi,δyi,δzi)деф,
где ƒo k(xo,уо,zо) - проектные геометрические параметры крана;
fм к(Δx,Δy,Δz)м - геометрические ошибки положения элементов крана, допущенные при монтаже;
fдeф к(δxi,δуi,δzi)деф - текущие деформационные геометрические характеристики крана.
Не напряженное состояние крана характеризует условие, при котором деформации в его конструктивных элементах отсутствуют, то есть
fдeф к(δxi,δуi,δzi)деф=0.
Тогда фактическая геометрия крана будет определятся по формуле
Fki=ƒо к(xo,yо,z0)+ƒм к(Δx,Δy,Δz)м.
Сюда входят все ошибки, допущенные как при изготовлении конструктивных элементов, так и непосредственно допущенные при их сборке и монтаже крана, а так же ненормативные зазоры в подвижных частях детерминирующие их люфты. В процессе ремонта устраняются дефекты геометрии крана исключительно рихтовкой ходовой части крана, или реализуются компенсирующие мероприятия с восстановлением геометрических условий, обеспечивающих штанные условия работы крана. Известные ранее технические решения реализуют условия, при котором определяются частные геометрические параметры кранов, которые характеризует его оригинальное состояние и не пригодны для разработки предложений на ремонт.
Изобретение поясняется чертежами, где даны:
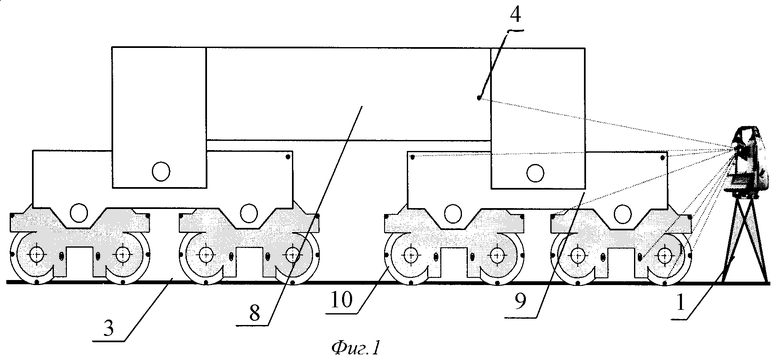
Фиг.1 - схема крана, вид со стороны концевой балки.
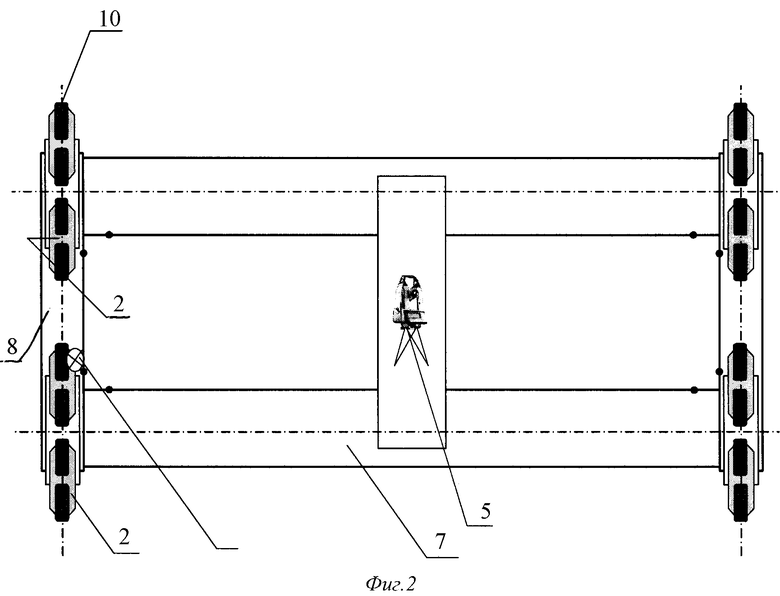
Фиг.2 - схема крана, вид сверху.
Для осуществления способа используют теодолит 1 и рейку 4, или электронный тахеометр 5 и отражатель 6, при этом контролируют взаимное расположение главных 7 и концевых балок 8, главных балансиров 9, балансиров 2 и ходовых колес 10 мостовых кранов.
Способ диагностики геометрических параметров ходовой части мостовых кранов состоит в следующем: первоначально определяют предельные состояния кранов например при помощи теодолита 1. Для этого в зоне балансиров 2 устанавливают теодолит 1, например ЗТ5КП, ориентируют его вдоль рельса 3 и выполняют прокатывание крана последовательно в двух направлениях. При движении крана в каждом из направлений непрерывно наблюдают рейку 4 (например алюминиевую телескопическую ТС-3), установленную на балансире 2 горизонтально и перпендикулярно направлению движения. При регистрации полного затухания изменений отсчетов движение крана прекращают. Выполнив отсчитывание по шкале рейки 4, характеризующее предельное состояние крана, начинают движение в обратном направлении до регистрации противоположного критического состояния, или электронным тахеометром 5 (например Elta-S6), для этого в зоне балансиров 2 устанавливают прибор, ориентируют его вдоль рельса 3 и выполняют прокатывание крана последовательно в двух направлениях. При движении в режиме слежения наблюдают отражатель 6, закрепленный на балансире 2. По измеренной траектории движения отражателя 6, установленного на балансире 2, характеризуют предельные состояния крана. Зафиксировав одно из крайних положений Т-,х кран прокатывают в обратном направлении до диаметрально противоположного его критического состояния T'.
Зафиксировав два названных положения, выполняют исследование геометрии в пределах данного интервала L с остановкой крана через некоторые интервалы ΔL=L/n. Например n=5.
При каждой остановке крана контролируют взаимное расположение главных 7 и концевых балок 8, главных балансиров 9, балансиров 2 и ходовых колес 10 относительно оси рельсового пути. Обработка результатов измерений заключается в следующем: первоначально при каждой остановки крана вычисляют геометрические характеристики моста крана, то есть его линейные и угловые размеры, а также угол разворота относительно оси подкрановых путей. После этого при каждой остановке крана вычисляют уклонения от оси подкрановых путей контролируемых точек, расположенных на краях ходовых колес 10 и балансиров 2.
В качестве итоговых результатов, характеризующих не напряженное состояние крана, принимают среднее значение
 ,
,
где р - общее количество остановок крана в j-товом эксперименте,
Fki - геометрические параметры К-тового элемента в каждом i-товом положении крана,
Fkj - среднее значение геометрических параметров K-тового элемента в j-товом эксперименте.
Рекомендуется для надежного исследования кранов определять Fkj не менее пяти раз (т.е.j=5)
 ,
,
где  - среднее значение геометрических параметров K-тового элемента в К экспериментах.
- среднее значение геометрических параметров K-тового элемента в К экспериментах.
При условии
 ,
,
где Δ - нормируемая величина,
c0 - коэффициент обеспечения точности,
δ - допустимое техническое отклонение ходовых колес крана от их номинального положения;
считают, что определение геометрии при ненапряженном состоянии крана выполнено надежно.
Далее на основе параметров  разрабатывают рекомендации на восстановление нормативных характеристик ходовой части крана.
разрабатывают рекомендации на восстановление нормативных характеристик ходовой части крана.
Предлагаемое техническое решение способа диагностики геометрических параметров ходовой части мостовых кранов реализует теорему, заключающуюся в том, что ремонтопригодная геометрия моста и ходовой части крана соответствует не напряженному его состоянию. Фактические геометрические характеристики крана описываются функцией
Fki=ƒi k(xi,yi,zi)Ti,
или
Fki=ƒo к(xo,yо,za)+ƒм к(Δx,Δy,Δz)м+ƒдeф к(δxi,δуi,δzi)деф,
где ƒо k(xo, yо, zo) - проектные геометрические параметры крана;
ƒдеф к(Δx,Δy,Δz)м - геометрические ошибки положения элементов крана, допущенные при монтаже;
ƒдeф к(δxi,δуi,δzi)деф - текущие деформационные геометрические характеристики крана.
Не напряженное состояние крана характеризует условие, при котором деформации в его конструктивных элементах отсутствуют, то есть
ƒдeф к(δxi,δyi,δzi)деф=0.
Тогда фактическая геометрия крана будет определятся по формуле
Fki=ƒo к(xo,yо,zo)+ƒм k(Δx,Δy,Δz)м.
Сюда входят все ошибки, допущенные как при изготовлении конструктивных элементов, так и непосредственно допущенные при их сборке и монтаже крана, а также ненормативные зазоры в подвижных частях, детерминирующие их люфты. В процессе ремонта устраняются дефекты геометрии крана исключительно рихтовкой ходовой части крана, или реализуются компенсирующие мероприятия с восстановлением геометрических условий, обеспечивающих штанные условия работы крана. Известные ранее технические решения реализуют условия, при котором определяются частные геометрические параметры кранов, которые характеризует его оригинальное состояние и не пригодны для разработки предложений на ремонт.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВОЙ ЧАСТИ МОСТОВОГО КРАНА КРУГОВОГО ДЕЙСТВИЯ | 2010 |
|
RU2425348C1 |
| СПОСОБ ДИАГНОСТИКИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВОЙ ЧАСТИ МОСТОВЫХ КРАНОВ РАДИАЛЬНОГО ДЕЙСТВИЯ | 2008 |
|
RU2384831C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИОННЫХ ХАРАКТЕРИСТИК СООРУЖЕНИЙ | 2010 |
|
RU2426089C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ЖЕЛЕЗНОДОРОЖНЫХ ПОЕЗДОВ | 1997 |
|
RU2145423C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2003 |
|
RU2230164C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИОННЫХ ХАРАКТЕРИСТИК ЗАЩИТНОЙ ГЕРМЕТИЧНОЙ ОБОЛОЧКИ | 2013 |
|
RU2546990C1 |
| СПОСОБ ГЕОМЕТРИЧЕСКОГО НИВЕЛИРОВАНИЯ | 2002 |
|
RU2213325C1 |
| МОСТОВОЙ КРАН | 2004 |
|
RU2279397C1 |
| САМОЛЕТ И ЕГО СТРЕЛОВИДНОЕ КРЫЛО | 2009 |
|
RU2398709C1 |
| Ходовая часть мостового крана | 1978 |
|
SU770998A1 |
Изобретение относится к области диагностики технического состояния технологического оборудования, в частности мостовых кранов для восстановления их эксплуатационной пригодности в процессе ремонта. При диагностике геометрических параметров ходовой части мостовых кранов осуществляют остановку крана, установку на подкрановых путях геодезических средств измерений, выполнение их ориентирования, формирование базисных направлений и выполнение измерений положения колес ходовой части относительно сформированных базисных направлений и вычисление положения ходовых колес. Первоначально определяют предельные состояния крана. Остановку крана осуществляют в момент фиксации предельно-деформированного состояния его конструктивных элементов. Выполняют исследование геометрических параметров конструктивных элементов крана в пределах зарегистрированного интервала L с остановкой крана через интервалы ΔL=L/n. При каждой остановке крана контролируют форму и взаимное расположение главных и концевых балок, главных балансиров, балансиров и ходовых колес. Обрабатывают результаты измерений и вычисляют геометрические характеристики моста крана, то есть его линейные и угловые размеры, а также угол разворота оси крана относительно оси подкрановых путей. На основе вычисленных средних параметров разрабатывают рекомендации на восстановление нормативных характеристик ходовой части крана. Достигается получение объективной информации о геометрических параметрах ходовой части крана. 2 ил.
Способ диагностики геометрических параметров ходовой части мостовых кранов, включающий остановку крана, установку на подкрановых путях геодезических средств измерений, выполнение их ориентирования, формирование таким образом базисных направлений и выполнение измерений положения колес ходовой части относительно сформированных базисных направлений и вычисление положения ходовых колес, отличающийся тем, что первоначально определяют предельные состояния крана, для этого геодезическим средством измерений, установленном в зоне балансиров, контролируют изменение геометрических параметров рамы крана и взаимного расположения балансиров и ходовых колес при прокатывании крана в одном из направлений вдоль путей, при этом остановку крана осуществляют в момент фиксации предельно-деформированного состояния его конструктивных элементов, зафиксировав предельное состояние, начинают движение в обратном направлении до регистрации противоположного критически деформированного состояния, зафиксировав два названных положения, выполняют исследование геометрических параметров конструктивных элементов крана в пределах данного интервала L с остановкой крана через интервалы ΔL=L/n, при каждой остановке крана контролируют форму и взаимное расположение главных и концевых балок, главных балансиров, балансиров и ходовых колес, при обработке результатов измерений вначале для каждой остановки крана вычисляют геометрические характеристики моста крана, то есть его линейные и угловые размеры, а также угол разворота оси крана относительно оси подкрановых путей, после этого для каждой остановки крана вычисляют уклонения от оси подкрановых путей контролируемых точек, расположенных на краях ходовых колес и балансиров, по этим результатам определяют перекосы и радиальные биения ходовых колес крана, в качестве итоговых результатов, характеризующих ремонтнопригодную геометрию крана, принимают среднее значение, далее на основе вычисленных средних параметров разрабатывают рекомендации на восстановление нормативных характеристик ходовой части крана.
| Способ контроля геометрии ходовой части транспортного средства и устройство для его осуществления | 1989 |
|
SU1691704A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2245837C1 |
| US 2002066390 A1, 06.06.2002 | |||
| КАБЕЛЬНЫЙ ВВОД | 2002 |
|
RU2194348C1 |

