1
Изобретение относится к области регулирования движения и может найти применение при организации и регулировании движения транспортных средств на однои многополосных автомобильных дорогах в условиях недостаточной топографической и метеорологической видимости с учетом состояния дорожного покрытия при высокой интенсивности движения.
Известен способ для поддержания безопасной скорости движения на дороге, который предусматривает информацию водителей об оптимальной скорости движения и дистанции между автомобилями путем установки вдоль дороги на расстоянии не менее 50 м друг от друга сигнальных элементов, например электроламп 1.
Горящая лампа сигнального элемента означает для водителя сигнал «путь свободен. Путем изменения периодичности включения сигнальных элементов и последовательной сдвижки фаз при включении расположенных рядом сигналов регулируются скорость движения автомобилей и дистанция между ними. Имеется возможность использования для этой цели звуковой сигнализации путем установки вместо ламп громкоговорителей, излучающих звук узким пучком перпендикулярно к оси дороги, или применением передатчиков электромагнитных волн в сочетании с оборудованием автомобилей соответствующими приемниками.
Однако в условиях недостаточной топографической и метеорологической видимости и неудовлетворительного, с точки зрения эксплуатации, состояния дорожного покрытия (мокрое, заснеженное, обледенелое) такой способ не обеспечивает оптимальных скоростей движения, а также прощгскной способности автомобильных дорог с поддержанием требуемого уровня безопасности движения.
Наиболее близким по технической сущности к изобретению является способ регулирований движения транспортных средств, основанный на формировании сигнала наличия транспортного средства в зоне регулирования движения и передачи управляющего сигнала переключения светофора в предыдущую зону регулирования движения 2.
Расстояние между блоками с датчиками, регистрирующими наличие автомобилей,
очень мало (15-30 м), а расстояние между сигналофорами еще меньще (7-6,5 м). При использовании данного способа не учитываются состояние проезжей части дороги и соответственно метеорологические
условия. Установка -. дорогостоящая и малонадежная ввиду большого количества датчиков и светофоров.
В большинстве предложенных систем управление ограничивается сбором исходной информации о состоянии нроезжей части (сухая, мокрая, обледенелая) и метеорологической дальностью видимости с последующим включением световых табло, рекомендуюш,их безопасную скорость движения или, в более простых системах, предупреждаюш.их об опасности (туман, гололед, снегопад). Такое управление движением только рекомендует режим движения по дороге, но не контролирует его выполнение каждым автомобилем. Любой маневр впереди идущего автомобиля во время тумана, снегопада или за естественным препятствием (деревья, откос, скалы) остается неизвестным сзади идущему транспорту. Цель изобретения - повышение скорости и безопасности движения, а также пропускной способности автомобильных дорог в условиях недостаточной топографической и метеорологической видимости .с учетом состояния дорожного покрытия.
Указанная цель достигается тем, что формируют сигнал метеорологического состояния покрытия проезжей части и при наличии транспортного средства в зоне регулирования движения передают управляющий сигнал переключения светофора в предыдущую зону регулирования движения, количество которых соответствует сигналу метеорологического состояния покрытия проезжей части.
В случае многорядного движения транспортных средств управляющий сигнал переключения светофора передают в последующие и в предыдущие зоны регулирования соседнего ряда движения, количество которых соответствует сигналу метеорологического состояния покрытия проезжей части.
Над каждой полосой движения или на поверхности полосы устанавливают сигнальные устройства, например световые, сообщающие водителю, свободна или занята впереди лежащая зона полосы движения на расстоянии, равном тормозному пути автомобиля при данных погодных условиях плюс некоторый зазор безопасности. Сигнальные устройства информируют также, свободен или занят соседний ряд движения на расстоянии, достаточном для совершения безопасного обгона и смены ряда движения. Информация сигнальных устройств меняется автоматически в зависимости от показаний датчиков присутствия автомобиля и датчиков состояния проезжей части по скользкости, т. е. метеорологического состояния проезжей части. Система может работать как в постоянном режиме на участках с ограниченной топографической видимостью, например на горных дорогах, так и включаться автоматически при снижении метеорологической дальности видимости до определенной, наперед заданной величины.
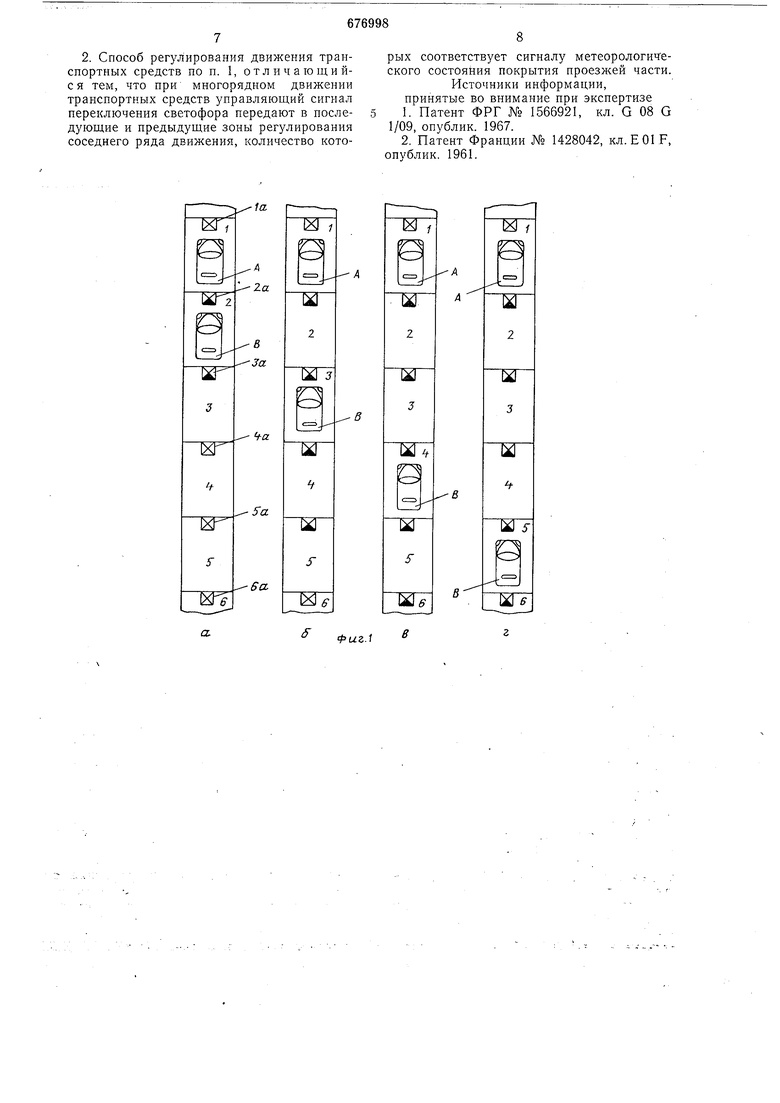
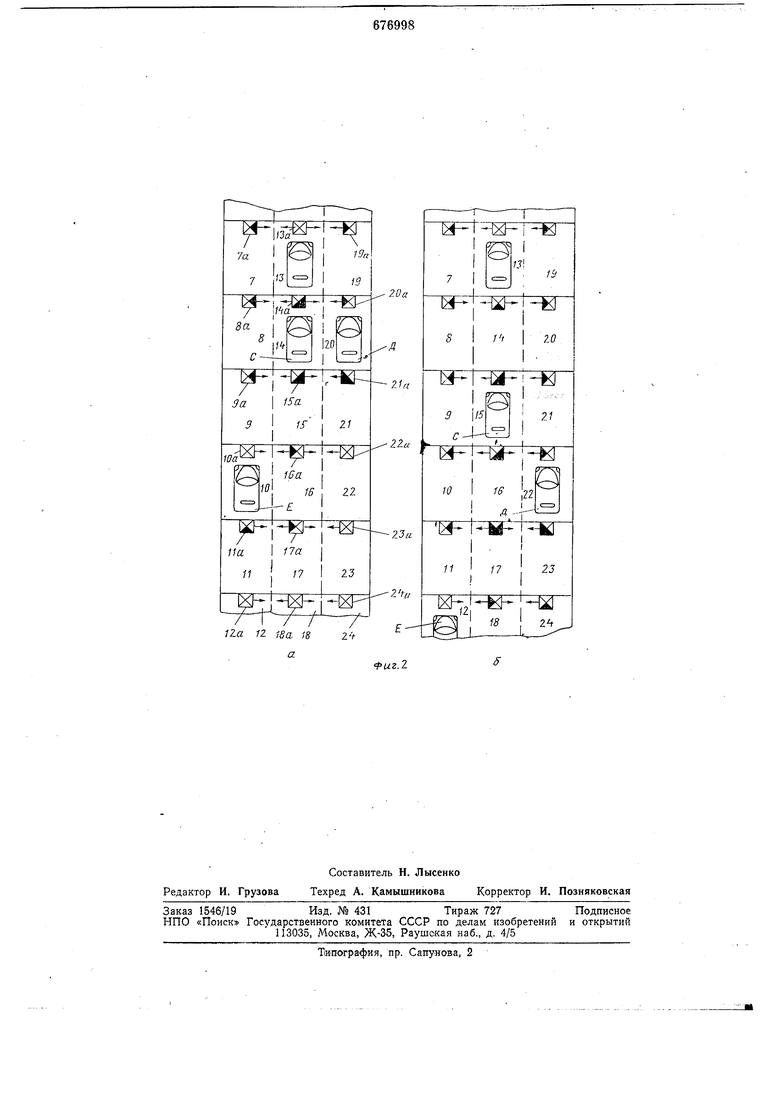
На фиг. 1, а-г показана схема размеще5 ния автомобилей, регулирование безопасного колонного движения автомобилей по одной полосе в условиях недостаточной видимости при различных состояниях дорожного покрытия; на фиг. 2, а-б-схема сме10 ны полосы движения на участке, оборудованном системой управления движения.
Предлагаемый способ управления автомобильным движением основан на том, что тормозной путь автомобиля на сухом, мокром, заснеженном и обледенелом покрытии при одинаковой скорости движения изменяется так, что при каждом последующем из перечисленных состояний покрытия он равен в среднем величине, в два раза
0 большей, чем при предыдущем состоянии покрытия. Эта закономерность обусловлена изменением коэффициента сцепления колеса автомобиля с дорогой от 0,8 на сухом шероховатом покрытии до 0,4 на мокром,
5 0,2 на заснеженном и 0,1 на обледенелом покрытии. Поэтому, рассчитав длину, тормозного пути на сухом покрытии и обеспечив движение автомобилей друг за другом на расстоянии, равном длине тормозного пути плюс некоторый зазор безопасности, можно при изменении состояния покрытия на мокрое, заснеженное или обледенелое обеспечить безопасность колонного движения простым увеличением числа
5 последовательных зон запрещения въезда последующего автомобиля. Однако, если для мокрых покрытий средние скорости движения почти равны скоростям движения на сухих покрытиях, средняя
0 скорость движения транспортных потоков снижается. В связи с этим скорость движения на заснеженных и обледенелых покрытиях на участках, оборудованных системой управления движением, ограничивают соответственно 0,87 и 0,71 частями от допустимой на сухих покрытиях, что соответствует фактически наблюдаемому снижению скоростей в этих условиях. Это позволяет ограничить число зон запрещения въезда тремя на заснеженных и четырьмя на обледенелых покрытиях.
Схема возможного размещения автомобилей при колонном движении на участке, где управление движением производится
5 по предлагаемому способу, показано на фиг. 1. На сухом покрытии автомобиль Л своим динамическим габаритом занимает зону 1. Присутствие автомобиля в зоне 1 регистрируется любым из известных спосо0 бов, например с помощью петлевого индукционного датчика. О наличии или отсутствии автомобиля в зоне 1 последующий автомобиль В, движущийся по этой же полосе, предупреждается соответствующим
сигналом, для чего может быть использован обычный двухсекционный светофор 2а, повешенный над полосой движения на границе зоны.
В соответствии с правилами уличного движения зеленый сигнал светофора означает, что впереди лежащая зона свободна и въезд в нее разрешен, а красный запрешает въезд в занятую зону. Въезд в зону 2, занятую автомобилем В, запрещается красным сигналом светофора За, а въезд в свободные зоны 3-5 разрешается зелеными сигналами соответственно светофоров 4а-6а, для автомобиля А во впереди лежащую зону - светофором а.
На мокрой проезжей части, состояние которой фиксируется датчиком наличия влаги на покрытии, лидирующий автомобиль А своим динамическим габаритом занимает зоны 1 и 2, как показано на фиг. 1, б.
Въезд последующего автомобиля В в зоны 1 и 2 запрещается красным сигналом светофоров 2а и За, расположенных над границей этих зон. Соответственно въезд в зоны 3 и 4, занятые динамическим габаритом автомобиля В, запрещается красным сигналом светофоров 4а и 5а. Въезд автомобилей в свободную зону 5 разрещается зеленым сигналом светофора 6а, автомобиля А во впереди лежащую зону - светофором а.
Если датчики фиксируют наличие снега на покрытии, то, как показано на фиг. 1,в, лидирующий автомобиль А своим динамическим габаритом занимает зоны 1, 2, 3, въезд в которые последующему автомобилю В запрещается красным сигналом светофоров 2а, За и 4а. Соответственно въезд в зоны 4, 5, занятые автомобилем В, запрещается светофорами 5а, ба, а автомобилю А въезд во впереди лежащую, свободную зону разрещается светофором 1а.
При наличии льда на дороге, что фиксируется гололедным датчиком, управление колонным движением происходит по схеме, показанной на фиг. 1, г. В этом случае автомобиль А своим динамическим габаритом занимает зоны 1-4, выезд в которые последующему автомобилю В запрещается светофорами 2а-5а. Въезд в зону 5, занятую автомобилем В, запрещается светофором 6а, а въезд автомобиля А во впереди лежащую, свободную зону разрещается светофором la.
Управление при многорядном движении на полосах попутного движения производится двухсекционным светофором с одной или двумя дополнительными секциями в зависимости от расположения соседних попутных полос движения. Пример управления движением на дороге с тремя полосами попутного движения при сухом покрытии показан на фиг. 2, а. Здесь позициями Та-24а обозначены светофоры, дополнительные их секции; 7-24 - зоны. Колонное движение по каждой из полос рег лирЗется разрешающим или запрещающим сигналом светофора по описанному способу. Возможность смены занимаемой полосы движения на соседнюю определяется по смыслу сигнала дополнительной секции светофора. Горящая стрелка дополнительной секции разрешает смену полосы, потухщая запрещает. Значение сигнала дополнительиой секции меняется в зависимости от показаний датчиков присутствия автомобиля в соседних зонах попутной полосы движения и состояния проезжей части в данный момент. Так, автомобилю С
дополнительная секция 14а светофора разрешает занять левую по ходу соседнюю полосу движения, свободную от динамического габарита автомобиля Е, занимающего только зону 10, а дополнительная секция
14а того же светофора запрещает занимать правую по ходу соседнюю полосу движения, так как зона 19 этой полосы занята динамическим габаритом автомобиля D и при смене полосы движения автомобилем
С возможно столкновение.
На мокром покрытии, как показано на фиг. 2, б, динамический габарит автомобиля возрастает в два раза, поэтому автомобилю С дополнительная секция 15а светофора разрешает занять левую по ходу полосу попутного движения, свободную от динамического габарита автомобиля , занимающего зоны 11 и 12, а дополнительная секция 15а светофора запрещает въезд на
правую по ходу соседнюю полосу попутного движения, так как прилегающие зоны 21 и 22 заняты динамическим габаритом автомобиля D. Колонное движение по каждой полосе и в этом случае регулируется
по описанному способу.
Аналогично с учетом изложенного, регулируется маневр смены полосы движения на заснеженном и обледенелом покрытиях. Предложенный способ позволяет значительно повысить скорость и безопасность движения.
Формула изобретения
1. Способ регулирования движения транспортных средств, основанный на формировании сигнала наличия транспортного средства в зоне регулирования движения и передачи управляющего сигнала переключения светофора в предыдущую зону регулирования движения, отличающийся тем, что, с целью повыщения скорости и безопасности движения, формируют сигнал метеорологического состояния покрытия проезжей части и при наличии транспортного
средства в зоне регулирования движения передают управляющий сигнал переключения светофора в предыдущую зону регулирования движения, количество которых соответствует сигналу метеорологического
состояния покрытия проезжей части.
2. Способ регулирования движения транспортных средств по п. 1, отличающийся тем, что при многорядном движении транспортных средств заправляющий сигнал переключения светофора передают в последующие и предыдущие зоны регулирования соседнего ряда движения, количество которых соответствует сигналу метеорологического состояния покрытия проезжей части.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ № 1566921, кл. G 08 G 1/09, опублик. 1967.
2.Патент Франции № 1428042, кл.ЕОГР, опублик. 1961.
Пи
/ I / / / /2a Г2 18 a 18 2
a
-2J«
---2V Риг.2
