Изобретение относится к системам автоматики с использованием электромагнитного излучения устройством для постоянного контроля за местоположением автомобиля относительно разделительных линий разметки проезжей части дороги и может быть использовано для создания аппаратуры, служащей для предотвращения столкновений транспортных средств.
Известен способ предотвращения столкновений автомобилей, заключающийся в том, что принимают оптическое излучение от автомобилей, находящихся на попутной и встречной полосах движения, преобразовывают их в электрические сигналы, определяют расстояние до транспортных средств, находящихся на попутной и встречной полосах движения, определяют скорости сближения с ними, определяют геометрические размеры впереди идущего транспортного средства и на основе данной информации обеспечивают выдачу рекомендаций водителю о соблюдении безопасных дистанций до впереди идущего автомобиля и о возможности выполнения маневра по его обгону в условиях встречного движения транспортного средства по встречной полосе (патент РФ №2310922, кл. G01S 17/93, 2007). Способ реализуется в устройстве для предотвращения столкновений автомобилей, содержащем: первый и второй оптико-электронный преобразователь, коммутатор-определитель координат, генератор сигнала тревоги, вычислитель, переключатель ввода информации о геометрических размерах транспортного средства, движущегося по полосе попутного движения, первый, второй, третий и четвертый световые сигнализаторы.
Недостатками указанного выше способа и устройства являются:
отсутствие учета продольного наклона дороги при расчете тормозного пути автомобиля и определения безопасной дистанции до впереди идущего автомобиля;
отсутствие учета пути, пройденного обгоняемым автомобилем за время обгона;
отсутствие заблаговременной оценки безопасности обгона до его начала с использованием в расчетах реальных максимально достижимых значений ускорения обгоняющего автомобиля с учетом его технического состояния загрузки и уклона дороги.
Эти обстоятельства определяют несоответствие принятой в данном способе модели обгона транспортного средства требованиям безопасности реального процесса. В прототипе решения на обгон принимается только с учетом текущей скорости равномерного движения обгоняющего автомобиля, без прогноза ее нарастания в ходе равноускоренного движения автомобиля при обгоне. Это делает невозможным принятие достоверного решения на обгон до его начала без выхода на встречную полосу и набора скорости, что создает предпосылки к столкновению автомобилей. Решение на обгон должно приниматься при нахождении обгоняющего автомобиля на своей полосе или с небольшим выездом на полосу встречного движения для оценки обстановки и определения расстояния до встречного автомобиля с учетом динамических характеристик обгоняющего автомобиля, его текущей загрузки, уклона дороги и определения времени, необходимого для обгона, с учетом прогноза возможного увеличения скорости. По результатам сравнения этого времени со временем столкновения со встречным автомобилем принимается решение на обгон.
Задачей предлагаемого изобретения является увеличение достоверности выбора безопасной дистанции до впереди идущего автомобиля и оценка безопасности его обгона за счет дополнительного учета максимально возможного ускорения автомобиля при его данном техническом состоянии и загрузке, а также за счет учета влияния продольного уклона дорожного полотна на длину тормозного пути и текущее ускорение автомобиля.
Известно, что в способе предотвращения столкновения автомобилей по патенту РФ №2450365; опубл. 20.04.2010 года, одновременно принимают оптическое излучение от автомобилей, находящихся на попутной и встречной полосах движения, преобразовывают их в электрические сигналы, определяют расстояние до транспортных средств, находящихся на попутной и встречной полосах движения, определяют скорости сближения с ними, определяют геометрические размеры транспортного средства в направлении движения, дополнительно используют датчик продольного уклона дороги и датчик ускорения автомобиля, и в начале каждой поездки определяют максимально достижимое ускорение используемого автомобиля, за счет выполнения определенной процедуры тестирования, с учетом его текущего технического состояния и загрузки и используют эту величину при расчетах безопасности проведения маневра обгона до его начала. С учетом уклона дороги осуществляют контроль совершения обгона по полосе встречного движения, обеспечивая выдачу светозвуковой сигнализации в случаях его запрета, а также в случаях, когда дистанция впереди идущего автомобиля, движущегося в попутном направлении, становится меньше допустимой.
Тестирование текущих динамических характеристик автомобиля или оценка максимально достижимого им ускорения с учетом его технического состояния и текущей загрузки производится на начальном этапе движения автомобиля, например на третьей передаче, по ровному участку дороги на скорости 50 км/час при нажатии педали акселератора до упора в течение трех секунд на основе показаний устанавливаемого в автомобиль датчика ускорения (акселерометра), либо путем расчета прироста скорости за заданное время. Способ реализован в устройстве для предотвращения столкновений автомобилей, содержащем два оптико-электронных преобразователя, вычислитель, состоящий из блока определения скорости сближения с транспортными средствами и блока логики, переключатель ввода информации о геометрических размерах транспортного средства, движущегося в попутном направлении, световые сигнализаторы, в которые дополнительно включены блок оценки динамических характеристик автомобиля, датчик ускорения, датчик продольного уклона дороги и два звуковых сигнализатора, причем выходы датчиков ускорения, скорости и продольного уклона дороги соединены с входом блока логики и дополнительно с входом блока оценки динамических характеристик автомобиля, вход которого соединен с входом блока логики, а выходы звуковых сигнализаторов соединены с выходом блока логики.
Устройство для предотвращения столкновения автомобилей содержит оптико-электронный преобразователь, вычислитель, переключатель ввода информации о геометрических размерах транспортного средства, движущегося по полосе попутного движения, первый и второй световые сигнализаторы, второй оптико-электронный преобразователь, датчик скорости автомобиля, в него включены звуковые сигнализаторы, датчик продольного уклона дороги, датчик ускорения автомобиля, блок оценки динамических характеристик автомобиля. Вычислитель содержит блок определения скорости сближения с транспортными средствами, блок логики и блок определения динамических характеристик автомобиля. Один из выходов оптико-электронных преобразователей соединен с блоком определения скорости сближения с транспортными средствами, а их второй выход соединен с входом блока логики. Блок логики представляет собой вычислительное устройство, реализующее алгоритм решения задачи безопасного обгона автомобиля. Кроме того, вход блока логики соединен с выходами датчика продольного уклона дороги, датчика скорости, датчика ускорения автомобиля и переключателя ввода информации о геометрических размерах транспортного средства, движущегося по полосе попутного движения. Выходы блока логики соединены со средствами световой и звуковой индикации. Вход блока оценки динамических характеристик автомобиля соединен с выходами датчиков скорости, наклона автомобиля и датчика ускорения автомобиля, а выход соединен с блоком логики.
Новыми признаками вышеописанного изобретения, обладающими существенными отличиями по способу, являются следующие действия:
определение максимально-достижимого ускорения автомобиля с учетом его текущей загрузки и технического состояния;
определения текущего продольного наклона дороги;
оценка безопасности обгона впереди идущего транспортного средства до начала его проведения с учетом проходимого им за время обгона пути;
учет уклона дороги при оценке безопасности обгона впереди идущего транспортного средства;
учет уклона дороги при оценке безопасности дистанции до впереди идущего транспортного средства;
контроль безопасности выполняемого обгона с учетом уклона дороги.
Недостатками указанных выше способов и устройств являются:
отсутствие информации определения неконтролируемого выезда автомобиля на полосу встречного движения, обочину, кювет встречного движения;
отсутствие информации определения неконтролируемого выезда автомобиля на обочину, кювет попутного движения;
отсутствие контроля местоположения автомобиля относительно разделительных линий разметки проезжей части дороги из-за невозможности контролировать визуально снежное покрытие;
отсутствие контроля местоположения автомобиля по причине усталости водителя, засыпания его за рулем во время движения;
отсутствие контроля за движением автомобиля ввиду неадекватного состояния организма при приеме лекарств и других запрещенных препаратов, влияющих на способность вождения автомобиля, приступе болезни или смерти водителя.
Сущностью заявленного изобретения является способ и устройство предотвращения столкновения автомобилей, заключающиеся в постоянном автоматическом контроле за местом положения автомобиля относительно разделительных линий разметки проезжей части дороги.
Задачей предлагаемых способа и устройства является предотвращение неконтролируемого выезда транспортных средств на полосу встречного движения, обочину и кювет встречного и попутного движения по причине усталости водителя, засыпания за рулем во время движения автомобиля, потери контроля за местом положения автомобиля относительно разделительных линий разметки проезжей части дороги из-за невозможности контролировать визуально снежное покрытие, потери контроля за движением автомобиля в неадекватном состоянии организма: при приеме лекарств и других запрещенных препаратов, влияющих на способность вождения автомобиля, приступа болезни или смерти водителя.
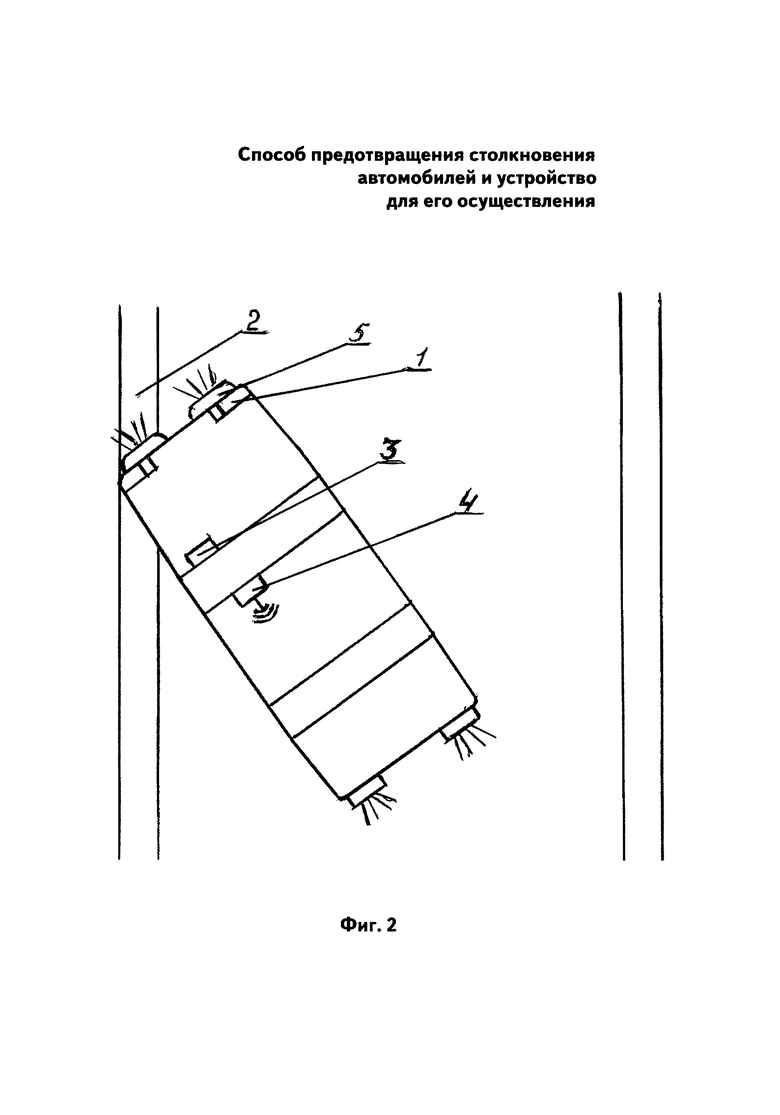
Этот способ реализуется устройством для предотвращения столкновения автомобилей (фиг. 1), содержащим датчики автоматического бесконтактного контроля 1 для определения местоположения автомобиля относительно разделительных линий разметки проезжей части дороги, носитель информации контроля линии разметки проезжей части дороги 2, содержащие ферромагнитный ингредиент в красителе, электронный блок приемник-преобразователь сигналов 3, звуковой 4, и световые 5 аварийные сигнализаторы.
Устройство работает следующим образом.
При неконтролируемом наезде автомобиля на разделительную линию разметки проезжей части дороги, являющейся носителем контрольной электромагнитной информации датчики контроля 1 принимают импульс электромагнитного сигнала, передают на электронный блок 3, который преобразовывает его в электрический сигнал, а также подает на аварийный звуковой сигнализатор 4 в салон автомобиля, для приведения водителя в рабочее состояние, и одновременно электронный блок 3 передает световой сигнал на аварийные световые сигнализаторы 5 водителям автомобилей, движущихся по полосе встречного и попутного движения.
Новыми признаками, которыми обладает заявленное изобретение и которые являются существенными отличиями по способу и устройству, являются следующие действия:
- предотвращение неконтролируемого выезда транспортных средств на полосу встречного движения, обочину и кювет встречного движения;
- предотвращение неконтролируемого выезда транспортных средств на обочину и кювет попутного движения.
- контроль за местоположением автомобиля относительно разделительных линий разметки проезжей части дороги вследствие невозможности визуального контроля при снежном покрытии.
Восстановление контроля за местоположением автомобиля вследствие засыпания водителя за рулем во время движения автомобиля, неадекватного состояния организма при приеме лекарств и других запрещенных препаратов, влияющих на возможность вождения автомобиля, приступа болезни или смерти водителя.
Использованные источники:
1. Патент РФ №2050561, кл G01S 17/93, 1995 г.
2. Патент РФ №2310922, кл G01S 17/93, 2007 г.
3. Патент РФ №2450365, кл G08G 1/16, 2006 г., B60W 30/08, 2012 г.
4. Колоколов Ю. Импульсные металлоискатели МАСТЕР КИТ // Радио. - 2010. - №10. - С. 62.
5. Левитин К.М. Безопасность движения автомобилей в условиях ограниченной видимости. - 2-е изд., перераб. и доп. - М.: Транспорт, 1986. - 166 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550566C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2450365C2 |
| Способ автоматизированного оповещения водителей транспортных средств на особо опасных участках дороги | 2016 |
|
RU2666103C2 |
| Способ помощи водителю наземного транспортного средства при обгоне | 2023 |
|
RU2831037C1 |
| Система помощи водителю наземного транспортного средства при обгоне | 2023 |
|
RU2831762C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ КУРСОВОЙ УСТОЙЧИВОСТИ И БЕЗОПАСНОСТИ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2660977C2 |
| УСТРОЙСТВО СТАШЕВСКОГО И.И. ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ АВТОМОБИЛЯ | 1999 |
|
RU2171501C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ НА АВТОДОРОГАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2368722C2 |
| Способ предотвращения столкновения транспортных средств | 2015 |
|
RU2616114C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310922C2 |

Изобретение относится к системам автоматики с использованием электромагнитного излучения устройством для постоянного контроля за местоположением автомобиля относительно разделительной линии разметки. Способ и устройство относятся к технике предотвращения столкновений и наездов автомобилей и других транспортных средств (ТС) при неконтролируемом выезде автомобиля на полосу встречного движения, или обочину, или в кювет встречного или попутного движения вследствие усталости водителя, засыпания за рулем во время движения, потери контроля за местоположением автомобиля относительно разделительных линий разметки проезжей части дороги и при невозможности визуального контроля вследствие снежного покрытия, потери контроля за движением при неадекватном состоянии организма при приеме лекарств и других запрещенных препаратов, влияющих на способность вождения автомобиля, приступа болезни или смерти водителя. При пересечении разделительных линий разметки проезжей части дороги автомобилем, являющихся носителем контрольной бесконтактной информации, устройство на автомобиле принимает электромагнитные импульсы сигнала, преобразовывает в электрический ток, обеспечивает подачу звукового сигнала на аварийный звуковой сигнализатор в салоне автомобиля для приведения водителя в рабочее состояние и одновременно световой сигнал на световые аварийные сигнализаторы, конкретизирующие аварийную ситуацию для автомобилей, движущихся по полосе встречного и попутного движения. 2 н.п. ф-лы, 2 ил.
1. Способ предотвращения столкновения автомобилей, заключающийся в том, что на автомобиле одновременно принимают оптическое излучение от транспортных средств, находящихся на попутной и встречной полосах движения, преобразовывают их в электрические сигналы, определяют расстояния до транспортных средств, находящихся на попутной и встречной полосах движения, определяют скорости сближения с ними, определяют геометрические размеры транспортного средства, движущегося в попутном направлении, и на основе данной информации обеспечивают выдачу световой сигнализации о соблюдении безопасной дистанции до впереди идущего транспортного средства и о возможности выполнения маневра обгона в условиях нахождения транспортного средства на полосе встречного движения, определяют максимально достижимое при текущей загрузке и техническом состоянии ускорение автомобиля, продольный уклон дороги, возможность безопасного обгона впереди идущего транспортного средства до начала его проведения с учетом проходимого им за время обгона пути, контролируют в ходе обгона соответствие текущих значений ускорения, скорости обгоняющего автомобиля и расстояния до встречного транспортного средства расчетным значением и выдают световой и звуковой сигналы на запрет обгона по полосе встречного движения в случае угрозы их столкновения, а также об опасной дистанции с учетом уклона дороги до впереди идущего транспортного средства, отличающийся тем, что предотвращают неконтролируемый выезд автомобиля на полосу встречного движения или обочину, кювет встречного и попутного движения, вследствие усталости водителя, засыпания за рулем во время движения, потери контроля за местоположением автомобиля относительно разделительных линий разметки проезжей части дороги при невозможности визуального контроля снежного покрытия, потери контроля за движением при неадекватном состоянии организма при приеме лекарств и других запрещенных препаратов, влияющих на способность вождения автомобиля, приступа болезни или смерти водителя, таким образом, при пересечении разделительных линий разметки проезжей части дороги принимают импульс электромагнитного сигнала, преобразовывают в электрический ток и подают на звуковой аварийный сигнализатор в салон автомобиля для приведения водителя в рабочее состояние и одновременно световой сигнал на аварийные световые сигнализаторы, конкретизирующие аварийную ситуацию водителям автомобилей, движущихся по полосе встречного и попутного движения для принятия правильного решения.
2. Устройство для реализации способа предотвращения столкновений автомобилей по п. 1, содержащее датчики автоматического бесконтактного контроля определения местоположения автомобиля относительно разделительных линий разметки проезжей части дороги, носитель информации контроля линии разметки проезжей части дороги с ферромагнитным ингредиентом в красителе, электронный блок, принимающий импульсы контрольных электромагнитных сигналов и преобразовывающий их в электрический ток и подающий сигнал на аварийный звуковой сигнализатор, установленный в салоне автомобиля, и одновременно - световой сигнал на световые аварийные сигнализаторы.
| ИНТЕЛЛЕКТУАЛЬНАЯ ТРАНСПОРТНАЯ СИСТЕМА И СПОСОБ ЕЁ ИСПОЛЬЗОВАНИЯ | 2010 |
|
RU2533645C2 |
| СИСТЕМА И ПРОГРАММА ПРОВОДКИ ПО МАРШРУТУ | 2007 |
|
RU2400710C1 |
| Электроионитный способ очистки сточных вод от кремнефтористого натрия | 1961 |
|
SU146249A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310922C2 |

