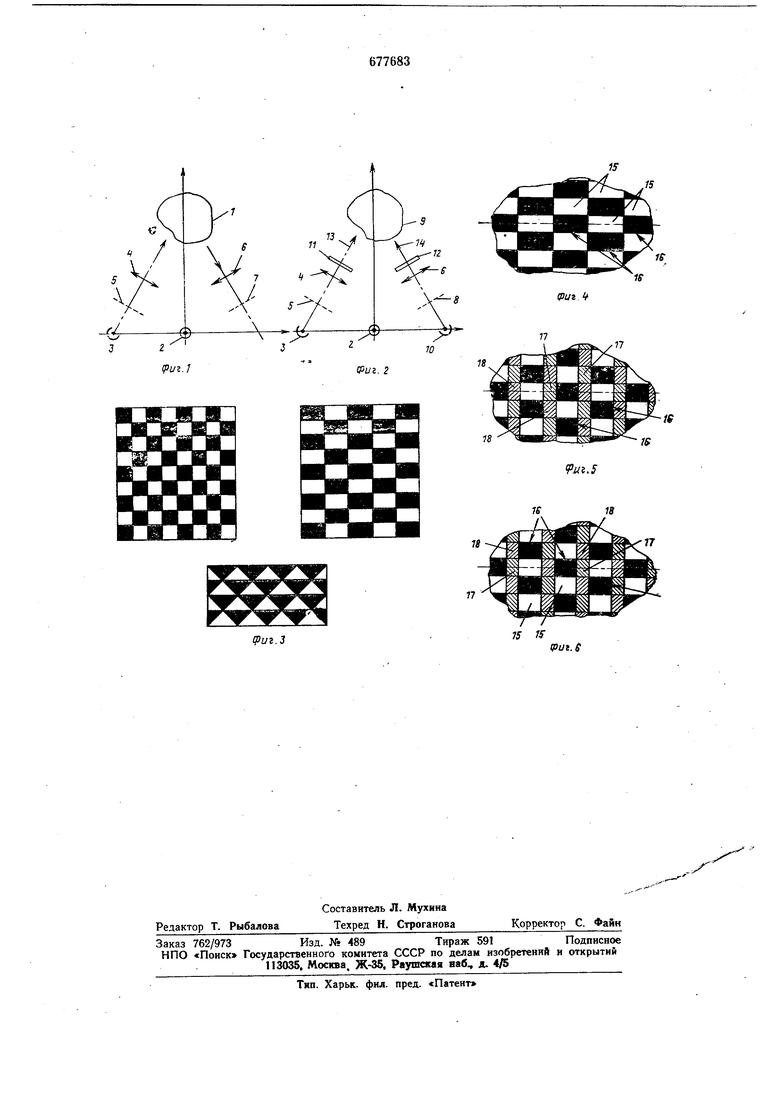
Во второй фазе способа (фиг. 2) эталонный предмет / заменяется одни-м из контролируемых предметов 9, растр 8 помещается в положение фотоматериала 7, и второй источник овета 10 через вторую оптическую систему 6 проецирует изображение растра 8 на контролируемый .предмет 9.
Одновременно первый источник 5 образует -на контролируемом предмете 9 изображение первого растра 5 через первую оптическую систему 4. Если второй растр 8 является позигивным .изображением, то первый растр сохраняет положение, которое он имел во время первой фазы. Если, наоборот, второй растр является негативным изображением, то первый растр должен быть перемещен или -повернзт так, чтобы сохранились кформа и- расгьредрление Непрозрачных и прозрачных зон растров. Цветные фильтры /7 и 12 располагаются соотаетственно на пути первого луча 13 и второго луча 14, цвета этих двух фильтров отличаются один от другого.
Л уаровую картину, возникающую на поверхности контролируемого предмета, тем легче наблюдать, чем цвет каждого из двух 13 и 14 отличается от подлинного цвета этого предмета.
Структура муаровой картины показана на фиг. 4, в .случае когда первый растр 5 со.стоит из шашечного рисунка прямоугольников.
Когда пространственные координаты поверхности контролируемого предмета 9 точно совпадают с коорди пата-ми поверхности эталонного предмета /, зоны освещенности и ослабления луча М точно накладываются на соответствующие зоны луча 13, образуя зоны 15 наложения овета, цвет которого является результирующим цветом лучей 13 и 14, и теней i/б (фиг. 4).
Если поверХ1ность предмета имеет выемку относительно поверх.ности эталонного предмета, то имеется несоответствие между зонам,и освещенности и ослабления лучей 13 и 14, что выражается на поверхности контролируемого предмета 9 наличием зон 17 и 18 перехода, лоявляющихся между зонами 15 наложения овета и тенями 1€ (фиг. 5j.
Если, наоборот, поверхность контролируемого предмета имеет вылуклость относительно поверхности эталонного предмета, то положение зон /7 и € перехода меняет направлен 1е относительно зон /5 наложения света и теней 16 для одного и того же относительного положения лучей 13 и 14 (фиг. б).
Кроме того, поверхность зон 17 и 18 связана соотнощением с расстоя1нием, разделяющим профили предмета и эталона. Расположение и поверхность зон /7 и 18 относительно зон 15 наложения позволяет непосредспвенным наблюдением определить величину .и знак отклонения между пространственными координатами точек поверхности .контролируемого предмета и координатами соответствующих точек поверхности эталонного предмета.
,Структура .первого растра выбирается в зависимости от формы контролируемого
предмета.
В случае, когда невозможно расположить эталонный предмет, второй растр 8 Может быть точно рассчитан оператором, исходя из данных, относящихся к структуре
первого растра 5, оптическим системам 4 и 6 и математической формулы поверхности эталонного предмета 1, на основе законов геометрической оптики.
Формула изобретения
30
Способ определения формы контролируемого предмета, при котором пер.вой оптической системой (Проецируют первый растр
на эталон, получают второй растр, фотографируя эталон с изображением первого растра, одновременно проецируют оба растра двумя оптическими системами на контролируемый предмет и по муаровой картине
определяют отклонение его формы от эталона, отличающийся тем, что, с целью получения знака отклонения, одновременное проецирование растров производят лучами разных цветов.
Источники информации, лринятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 225463, кл. G 02 В 27/38, 1967.
2.Зая.в1ка Великобритании № 1276737, кл. G 2 J, опубл. 1972.
п
григЛ
15
9 Ti
Фиг if
-:
70
Фиг. г
IS
.J
lput.3
IS «
iput.e
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ исследования напряженного состояния в образце | 1973 |
|
SU588931A3 |
| ГРАФО-ПРОЕКЦИОННЫЙ МУАРОВЫЙ СПОСОБ ИЗМЕРЕНИЯ | 2014 |
|
RU2583852C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ЭЛЕКТРОННО-ПРОЕКЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ОБЪЕКТА | 2001 |
|
RU2216710C2 |
| Способ контроля отклонения формы поверхности деталей сложной формы | 1982 |
|
SU1065683A1 |
| Способ слежения за положением глаз пользователя и контактная линза (варианты) | 2023 |
|
RU2817166C1 |
| РАСТРОВО-МУАРОВАЯ ОПТИЧЕСКАЯ СИСТЕМА | 2014 |
|
RU2596948C2 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ОБЪЕКТА И ПРЕДСТАВЛЕНИЯ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ НА УПОМЯНУТОЙ ПОВЕРХНОСТИ | 2005 |
|
RU2295110C1 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
| ЗАЩИТНАЯ НИТЬ | 2012 |
|
RU2607811C2 |