о а
СП
Од
00 М
Изобретение отнр,сится к измерительной технике и может быть использовано для бесконтактного контроля отклонения формы поверхности сложной формы, в частности осесимметричных асферических поверхностей высшего порядка, преимущественно оптических.
Известен спрсоб контроля отклонения формы поверхности сложной формы, основанный на получении топографических карт рельефа поверхности путем проекции IS.:: интерференционных полос и позволяющий проводить контроль отклонений формы в реальном времени и при заданном способе ориентирования объекта.
При контроле по этому способу осесимметричных асферических поверхностей деталей восстановленное с голограммы интерференционное поле формируют с эквидистантным шагом полос, измеряют шаг интерференционных полос.относительно одной базовой точки, находящейся .на оси вращения детали, и определяют координаты- точек контролируемого сечения а.сферической поверхности
Недостатком способа, основанного на непосредственном измерении щага интерференционных полос на конролируемой поверхности, является невозможность увеличения точности и чувствительности контроля за счет уменьшения шага эквидистантных полос в интерференционном поле. Уменьшение шага полос приводит к накоплению суммарной погроаности измерения относительно базовой точки и непроизводительно .длительному времени измерения координат интерференционных полос. Кроме того, невозможно визуально определять локализацию участков поверхности, где имеется отклонение форма
Наиболее близким к изобретению по технической сущности является способ контроля отклонения фор1«я поверхности деталей сложной формы, заключакжцийся в том, что получают изображения топограммы поверхностей контролируемой детгши и эталона, совмещают изобргикения, получают муаровую картину в виде муаровых полос, по шагу которых судят об отклонении форьм поверхности детали L2l.
Контролируемый объект помещают в интерференционное поле, образованное когерентными, почти параллельными коллимированнш и пучками, угол между KOTOptiM равен 2/6.
Вначале получают фотоснимок топографической карты эталонной поверхности и при этом измеряют угол t между биссектрисой и плоскостью поверхности объекта. Затем устанавливают на место эталонного объекта
контролируемый объект и также получают фотоснимок топографической карты. Если контролируемый объект расположен на том же расстоянии и имеет ту же ориентацию, что и эталонный, тогда расстояние между дву соседними темными полосами муара будет соответствовать отклонению формы поверхности (в направлении, перпендикулярном поверхг-ости) , равному 2ti;
л
2fl :
Sir 0 SVn t cot 1 )
где i. - угол между направлением наблюдения (фотографирования) и плоскостью поверхности объекта. Изображения топографических карт могут быть получены на одном негативе или на двух раздельных снимках 2.
Недостатком способа является необходимость точной установки контролируемой детали на место эталонной. Для совпадения ориентации контролируемой и эталонной деталей необходимо отмечать на них три базовые точки. Как уже было отмечено определение баз на контролируемой поверхности имеет погрешность, обусловленную отклонением ее формы,Это снижает точность совмещения деталей, приводит к искажению муаровых полос и в итоге снижает точность контроля. Вторым недостатком способа является необходимость изготовления фотоснимков контурных карт эталонной и контролируемой деталей, что является непроизводительной и трудоемкой операцией. Указанный способ не позволяет контролировать отклонения формы поверхностей сложной формы, например, осесимметричных асферических оптических поверхностей высшего порядка, не имеющих образцов с эталонными поверхностями ввиду отсутствия способов аттестации с требуемой точностью (менее О,5 мкм.
Целью изобретения является повышение точности и производительности контроля деталей с осесимметричиыми асферическими поверхностями высшего порядка.
Поставленная цель достигается те что согласно способу контроля отклонения формы поверхности деталей сложной формы, заключающемуся в том что получают изображения топограмш поверхностей контролируемой детали эталона, совмещают эти изображения, получают муаровук картину в виде муаровых полос, по шагу которых судят об отклонении формы поверхности детали,, устанавливают перед совмещением изображений топограмм оптическую ось системы, формирующей изображение топогр ммы поверхности детали, соосно с ее ось симметрии, направляют на поверхность детали интерференционное . поле с эквидистантным шагом полос под заданным углом, устанавливают указанную систему относительно оси симметрии детали на угол, определяегвлй разрешающей способностью этой системы и направлением нормали к участку поверхности детали с максимальной частотой наблюдаемых интерференционных полос,
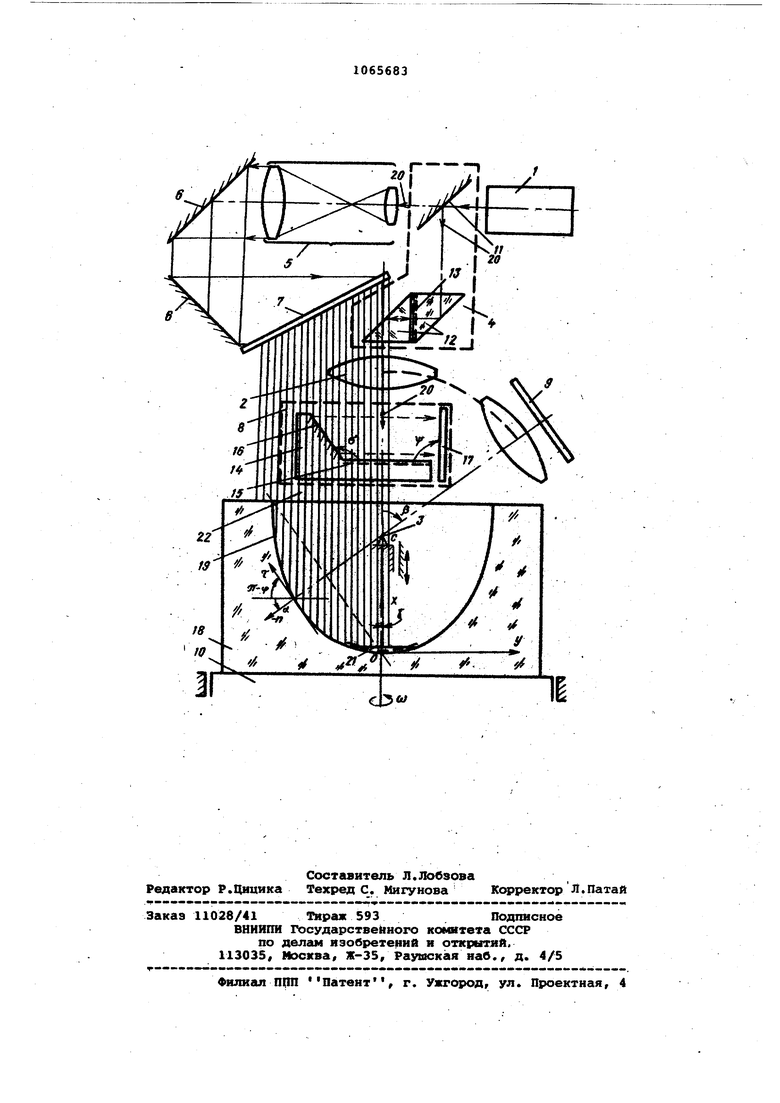
На чертеже изображена принципиалная схема устройства, осуществляющего предлагаемый способ.
Устройство содержит последовательно расположенные лазер 1, систему 2, формирующую изображение топограммы поверхности детали и выполненную в виде объектива ось 3 поворота системы 2 относительно оси симметрии контролируемой поверхности, установленную с возможнбстью подвижки вдоль указанной оси симметрии, узел. 4 ориентирования оптической оси системы 2, снабженный механизмом ввода и вывода его из хода луча лазера 1, коллиматор 5, отражающее зеркало б, голограмму 7, узел 8 ориентирования интерференционного поля, снабг женный механизмом (не показан) ввода и вывода его из зоны интерференционного поля, транспарант 9 изобрг1жения топограммы эталонной поверхности, установленный в плоскости. изображения системы 2, повернутой на оси 3 в рабочее положение, и вы полненный в виде ряда непрозрачных полос на прозрачной подложке, и шпиндель 10 для установки контролируемой осесимметричной детали.
Узел 4 состоит из отражающего зеркала 11 и склеенной поворотной призилл 12 с полупрозрачной, поверхностью 13. Узел 8 состоит из юстировочной призмы 14 с полупрозрачной гранью 15 и с отражающей гранью 16 и эталонного транспаранта 17 изображения интерференционных полос, выполненного в виде ряда непрозрачных полос на прозрачной подложке. Способ контроля осуществляется следующим образом.
Деталь 18 с контролируемой осе.симметричной асферической поверхностью 19 устанавливают на шпинделе 10 и центрируют по оси вращения
Далее производят необходимую при использовании эффекта муара взаим.нуй ориентацию контролируемой осесимметричной поверхности -19 детали 18, интерференционного поля и оптической оси системы 2, формирующей изображение топограмьм контролируемой поверхности 19 детали 18, при этом ось симметрии детали 18
является базовой осью,- относительно которой проводят все операции по взаимной ориентации. Ориентирование системы 2 производят по автоколЛимационной схеме, причем первоначально
оптическая ось этой системы 2 выставляется соосно оси симметрии детали 18. Узкий световрй луч 20 от лазера. 1 направляется вдоль оси симметрии детали 18 посредством ввода ,
на пути этого луча узла 4 ориентирования оптической оси системы 2, бтражается в обратном направлении от вершины - в точке О асферической поверхности 19 детали 18. Для более
точного выполнения операции совмещения луча 20 с осью симметрии детали 18 (в случае шероховатой асферической поверхности) в окрестности точки О наносится слой отражающей жидкости 21, деталь 18 приводится во вращение на шпинделе 10,
при этом в жидкости образуется воронка, вершина которой точно совпадает с точкой 0.
При этом предполагается, что
ось симметрии детали 18 совпадает с осью вращения шпинделя 10 станка (не показан) для обработки асферической поверхности, так как описываемый способ контроля отклонеНИИ формы целесообразно использовать в качестве стадии технологического процесса формообразования асферической поверхности без съема детали со шпинделя станка. Если же
при вращении детали 18 луч 20 описывает в обратном ходе окружности вокруг самого себя в прямом ходе, то при помощи юстировочных подвижек системы 2 можно совместить в пространстве оба хода луча 20, например при визуа шном наблюдении этого совмещения на полупрозрачной поверхности 13. Далее вводится в ход луча .20 оптическая система 2, и ось этой
системы 2 устанавливается соосно оси симметрии детали 18, причем положение соосности Контролируется также на указанной полупрозрачной поверхности 13 по постоянству к ртины совмещения луча 20 в прямом
и обратном ходе, полученной до введения в ход этого луча данной системы 2. После этого узел 4 выводится из хода луча 20. - Луч 20 расширяется коллиматором 5,
отражается от зеркала 6 и дифрагирует на голограмме 7, с которой восстанавливается интерференционное поле 22 с эквидистантным шагом ft по- . лос.
На контролируемую поверхность 19 направляетсй интерференционное поле 22 под углом f к ее оси симметрии , и на этой поверхности образуется топограмма - контурная интерференционндя карта рельефа поверхности. Ориентирование интгрференционного поля 22 относительно оси симметрии детали 18 производится посредством ввода в него узла 8, котировочная призма 14 которого жеско связана с эталонным транспарантом 17 изображения интерференционных полос гранью 16 юстировочной призмы. Рабочие грани 15 и 16 юстировочной призмы 14 и плоскость транспаранта 17 ориентированы друг относительно друга под заданными углами 6 и V, Полупрозрачная грань 15 юстировочной призмы устанавливается перпендикулярно оси симметрии детали 18. В таком случае угол э оп ределяет направление отраженных интерференционных полос поля 22 от отражающей грани 16 юстировочной призмы 14, а угол V определяет шаг наносимых на эталонный транспарант 17 полос. При наложении отраженных от грани 16 интерференционных полос на полосы эталонного транспаранта 17 образуется муаровая картина, выполнякзщая вспомогательную, настроечную операцию по сравнению с основной, измеряемой муаровой картиной, образуемой транспарантом Если шаг отраженных интерференционIных полос и шаг полос на транспаран 17 совпадают, то настроечная муаровая картина имеет полосу бесконечной ширины. Меняя направление интерференционных полос, т.е. меняя угол У, можно получить настроечную му,аровую по{1осу бесконечной ширины и, таким образом, ориентировать интерференционное поле 22 относительно базовой оси (оси симметрии детали 1 Наиболее простым вариантом является угол f-0. Задавая углы d и V , можио направлять интерференционные полосы под требуемым углом j. После этого узел 8 выводится из интерференционного поля 22. Транспарант 17 выполняется различным образом (фотосъемка чертежа, представляющего собой систему прямых линий, синтезом на ЭВМ,нарезанием штрихов на прозрачной подложке с помощью делительной машины и т.д.).
Оптическая система 2 поворачивается на угол .р относительно оси симметрии детали Ох вокруг оси 3, установленной в.точке С,и объектив этой системы 2 формируе.т изображение топограммы асферической поверхности 19 в плоскости тр&нспаранта 9 представляющего собой синтезированное изображение топограмма эталонной поверхности, соответствующей поверхности 19. В результате сопряжения двух изображений топограмм образуется муаровая картина в виде муаровых полос в зонах отступления контролируемой асферической поверхности от расчетной, эталонной.
Взаимосвязь между произвЬдными (x.j,) и У2(Х2) от функций, описывающих эталонную и контролируемую поверхности в контролируемом сечении, совмещенном с плоскостью хоу, в паре сопряженных точек х и Xg, определяется след: ющим соотношением
v|(x,)(5inp4)cos;a
2 (hr ii
in fj
v;(x,)si
--51ПЭ
cos
Формула (1) позволяет по известному измеряемому шагу муаровой полосы ti определять значение угла наклона касательной V или угла наклона нормали относительно оси оу в данной точке Xg контролируемой поверхности 19 по значению производ ной ) в этой точке, определяе-г мой по формуле (1)..
Отклонение u.cL угла наклона нормали в соответствугацей точке контролируемой асферической поверхности 19, характеризующее отклонение формы поверхности от расчетной в угловой мере, определяется по формуле
ticos fot+fi)
(2)
В случае если сечение расчетной эталонной поверхности плоскостью хоу задается в виде ломаной линии с шагом li (ступенчатая поверхность) , начало которой совмещено с вершиной асферической поверхности, отклонен-ие угла нормали для середины,п-го участка ломаной линии определяется также по формуле {2) при
oC oi,
до ucL..
Величина i3c(, предварительно рассчитывается для заданного уравнения контролируемой поверхности при заданном ориентировочно шаге муаровых полос h, по допуску и определяется в процессе контроля по измеряемому шагу ti,, при этом i
i Aon
Требуемая точность контроля о
(ЛоС) отклонений формы обеспечивается оптимальным выбором параметров /Э , Ь для данного типа контролируемой асферической поверхност способом регистрации измеряемой величины Ъ , способом аттестации шага Ii интерференционного поля, применяемого для получения топографических интерферограмм.
Описываемый способ не требует наличия детали с эталонной поверхностью сложного профиля, выполненной по расчетному уравнению оптимальной поверхности сравнения и ат- тестованной с точностью на порядок выше требуемой точности изготовления. В описываемом способе рассчитывают и изготавливают плоский эквивалент эталонной топограммы, транспарант 9, соответствующий применяемому объективу в системе 2, фop ярующей изображение топограммы поверхности детали, и помещгиот его в плоскость изображения данного объектива, сопряженную с плоскостью наводки на кзнтролируемую поверхность 19. Таким образом, получают синтезированное изображение эталонной топограммы, т.е. синтезированное изображение топогра1 влы эталонной поверхности, причем под эталонной поверхностью понимают математически заданную поверхность сложного профиля, (гоответствуйвдую расчетному уравнению контролируемой поверхности или иной выбранной поверхности сравнения (ступенчатая поверхность). Синтезированное изображение выполняется, например/ в виде транспаранта, т.е. сисsetaa непрозрачных полос на прозрачной подложке.
Транспарант 9 должен иметь подвижки в трех взаимно перпендикулярных иаправ лениях для точного сопряжения двух изображений топограмм (детали и эталона), при котором будет наблюдаться максимальный контраст муаровых полос, а также для того,чтобы совместить края двух изрбргикений. .Естественно, размер синтезированного изображения на транспаранте 9 должен быть равен размеру изображения, которое фор«юруется объективом системы 2. Это достигается в процессе синтеза транспаранта 9 с учетом масштаба изображения, даваемого объективом системы 2.
Для того, чтобы наблюдать интерференционные полосы на всей контролируемой поверхности 19 (в случае осесимметричных поверхностей это половина меридионального сечения с небольшим переходом-; за вершину поверхности точки О) или щюектировать их с помощью оптической сястемл, необходимо увеличить разрешающую способность системы 2 н.ориентировать эту систему.2 в направлении/ близком к направлению нормали к средней зоне меридионального сечения контролируемой поверхности 19, при этом, по возможност и, стараясь приблизить это нап авление к нормали, участка поверхности с максимальной пространственной частотой интерференционных полос,
Таким образом, в описываемом, способе система 2, формирующая изображение топограммы контролируемой поверхности детали, и интерференционное поле в виде ряда эквидистантных плоскостей ориентируются под расчетными углами у и ft отно0сительно оси симметрии контролируемой поверхности 19, совпгщающей с осью вращения ее на шпинделе 10 станка. При этом оптическая ось указанной системы 2 пересекает ось симметрии детали 18 в заданной точ5ке С. .Длд произведения контроля необходимо установить транспарант 9, являющийся синтезированным изображением эталонной топограммы, в плоскости изображения развернутой на
0 системы 2,совместив реперныр отметки на транспаранте 9 и ,на изображении топограммы. Шаг полученных муаровых полос измеряется в / проходящем свете сканирующим одно5координатным устройством (не показано) , установленным за плоскостью изображения системы 2.
Описанный способ позволяет контролировать отклонение формы осесим0метричных асферических поверхностей высшего порядка с точностью 2-5 в угловой мере и обеспечивает повышение производительности.
Ввиду принятой системы ориентации
5 основных компонентов принципиальной схемы, реализующей способ, получаемая муаровая картина является однозначной без ориентации контролируемой поверхности по трем базо0вым точкам, Осесимметричность указанной поверхности позволяет контролировать отклонения формы в.различньы меридиональных сечениях при постоянной установке транспарант изображения эталонной топограммй.
5 При этом наблюдение муаровой картины и измерение шага муаровых полос производятся в реальном времени. Для определения отклонения формы в выбранной зоне асферической по0верхности достаточно измерить шаг соответствующей муаровой полосы без необходимости определения местоположения данной полосы огносительно начала координат.
5
Изобретение позволяет с высокой точностью и производительностью осуществлять контроль отклонения формы осесимметричных асферических поверхностей в процессе их формо0образования без съема деталей со шпинделя станка.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля отклонения формы поверхности детали | 1980 |
|
SU938008A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| ИНТЕРФЕРОМЕТР С ФУНКЦИЕЙ ДИФФЕРЕНЦИАЛЬНЫХ ИЗМЕРЕНИЙ | 2020 |
|
RU2744847C1 |
| МЕТОД КОНТРОЛЯ ФОРМЫ ВЫПУКЛЫХ ОПТИЧЕСКИХ СФЕРИЧЕСКИХ И АСФЕРИЧЕСКИХ ПОВЕРХНОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2706388C1 |
| АВТОКОЛЛИМАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2019 |
|
RU2705177C1 |
| Интерферометр для контроля вогнутых асферических поверхностей | 1990 |
|
SU1728650A1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ВНЕОСЕВОЙ АСФЕРИЧЕСКОЙ ОПТИЧЕСКОЙ ДЕТАЛИ | 2023 |
|
RU2803879C1 |
| СКАНИРУЮЩИЙ ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2002 |
|
RU2264595C2 |
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОСИ АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2658106C1 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
СПОСОБ КОНТРОЛЯ ОТКЛОНЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ДЕТАЛЕЙ СЛОЖНОЙ ФОР№1, заключающийся в том, что получают изображения топограмлм поверхностей контролируемой детали и эталона, совмещают эти изображения, получают муаров5ю картину в виде муаровых полос, по шагу которых судят об. отклонении $OPNEJ поверхности детали, отличающ и и с я тем, что, с целью повышения точности и производительности контроля деталей с осесимметричными асферическими поверхностями высшего порядка, устанавливают перед совмещением изображений то- , пограмм оптическую ось системы, формирукхцей изображение топограмкы поверхности детали, соосно с ее осью симметрии, направляют на поверхность детали интерференционное поле с эквидистантным шагом полос под заданным углом, устанавливают указанную систему относительно оси симметрии детали на угол, определяемый разрешакнцей (Способ(Л ностью этой системы и направлением нор1У1али к участку поверхности дета-, ли с максимальной частотой наблюдаемых интерференционных полос.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вест И | |||
| Голографическая интерферометрия | |||
| М., Мир, 1982, с.467-468.2 | |||
| АЬгагойрА N | |||
| Laser Focus, 4, december, 1968, p.26 (прототип). | |||
