Изобретение относится к области бесконтактных оптических измерений и может быть применено в различных отраслях народного хозяйства, там, где возникает необходимость оперативного измерения, фиксации и сравнения поверхностей сложной формы, например в машиностроении для контроля формы поверхности криволинейных изделий и т.п.
Известен способ измерения формы и пространственного положения поверхности объекта (Патент РФ №2148793, 10.05.2000, G 01 B 11/24), в котором с помощью проекционной оптической системы проецируют на измеряемую поверхность объекта набор полос с синусоидальным распределением интенсивности, сдвигая его несколько раз, и одно дополнительное распределение интенсивности освещенности, регистрируют соответствующие изображения поверхности, из которых определяют полные фазы синусоидального распределения для каждой точки поверхности, независимо, с использованием данных предварительной калибровки находят абсолютные координаты точек поверхности. Данный способ позволяет получить достаточно высокую точность измерения за счет использования дополнительной информации в обработке без усложнения конструкции измеряющего устройства.
Недостатком данного технического решения является отсутствие возможности проецирования изображения результатов измерения непосредственно на поверхность измеряемого объекта.
Известен также способ измерения формы поверхности объекта и представления результатов измерения на упомянутой поверхности (Патент РФ №2242714, 20.12.2004, G 01 B 11/25) - прототип, включающий проецирование с помощью оптического устройства на поверхность объекта распределения световой интенсивности, позволяющего однозначно установить соответствие между элементом проецируемого распределения световой интенсивности и освещенной этим элементом точкой поверхности объекта, регистрацию изображения освещенной поверхности объекта, которую осуществляют с направления, отличного от направления проецирования, визуализацию на поверхности объекта с помощью проекционных оптических устройств отклонений от измеренного ранее образца. В данном способе визуализация отклонения от образца осуществляется за счет получения на поверхности измеряемого объекта муаровой картины.
Недостатком этого способа является уменьшение производительности измерения за счет недостаточной достоверности и информативности процесса измерения, поскольку муаровая картина на поверхности измеряемого объекта не позволяет получить наглядное представление величин отклонений, а также за счет увеличения производимых операций при выполнении измерения, что обусловлено усложнением конструкции измеряющей установки, в которой должны быть совмещены функции проектора и регистратора.
К тому же, в случае использования фотоносителей в данном способе требуется производить фотохимическую обработку и точный возврат слайда в проектор при выполнения измерения, а в случае использования электронных носителей требуется изготовление устройства, совмещающего в себе функцию проектора и регистратора.
Технический результат заявленного способа - повышение производительности измерения за счет упрощения процесса измерения и повышения его достоверности и информативности.
Для получения заявленного технического результата в предлагаемом способе измерения формы поверхности объекта и представления результатов измерения на упомянутой поверхности, включающем проецирование с помощью оптического устройства на поверхность объекта распределения световой интенсивности, позволяющего установить соответствие между элементом проецируемого распределения световой интенсивности и освещенной этим элементом точкой поверхности объекта, регистрацию изображения освещенной поверхности объекта, которую осуществляют с направления, отличного от направления проецирования, визуализацию на поверхности объекта с помощью оптического устройства отклонений от измеренного ранее образца, предварительно вычисляют координаты точек поверхности измеренного ранее образца, после регистрации изображения поверхности объекта вычисляют координаты точек поверхности объекта, а также разность координат между вычисленными точками поверхности объекта и ранее вычисленными идентичными точками образца, по результатам вычислений условно присваивают каждой точке поверхности объекта цвет или интенсивность света, при этом визуализацию отклонений формы поверхности объекта от образца осуществляют проецированием с помощью оптического устройства на поверхность объекта полученного распределения цветов или интенсивностей света, по которому судят об отклонении формы поверхности объекта от образца.
При этом могут быть вычислены иные параметры поверхности объекта, характеризующие его форму.
В качестве образца можно использовать математическое описание эталонной поверхности объекта (математическую модель).
Получение высокой достоверности и информативности измерения достигается за счет получения наглядной картины на поверхности измеряемого объекта величин отклонений от образца. Причем наглядная картина величин отклонений может быть условно представлена на поверхности измеряемого объекта как в цвете, так и посредством распределения на ней светового потока (освещенности). При этом время от полученных результатов измерений для образца или ввода полученной для него математической модели до измерения тестируемого объекта с проекцией картины отклонений на нем сокращено до нескольких секунд по сравнению с прототипом.
Упрощение процесса измерения достигается за счет упрощения конструкции измерительной установки, которая позволяет разделить функции проецирования и регистрации изображения, что, в свою очередь, позволяет использовать при выполнении измерений серийно выпускаемое оборудование (например, видеопроектор, цифровая камера или др.).
Под проецируемым на поверхность объекта распределением световой интенсивности понимается любая совокупность точек, пятен, отрезков линий, кривых и т.д., т.е. состоящая из элементов, которые могут быть распознаны на изображении поверхности объекта при его регистрации.
Визуализируемым параметром является отклонение формы поверхности измеряемого объекта от образца или иные параметры поверхности измеряемого объекта, характеризующие его форму, например кривизна, нецилиндричность и т.п.
В качестве оптического устройства может быть использовано любое проекционное устройство, например мультимедийный видеопроектор.
В качестве устройства, регистрирующего изображение поверхности объекта, может быть использовано любое видео или цифровое устройство, позволяющее осуществить передачу регистрируемых данных в цифровом виде, например цифровая видеокамера.
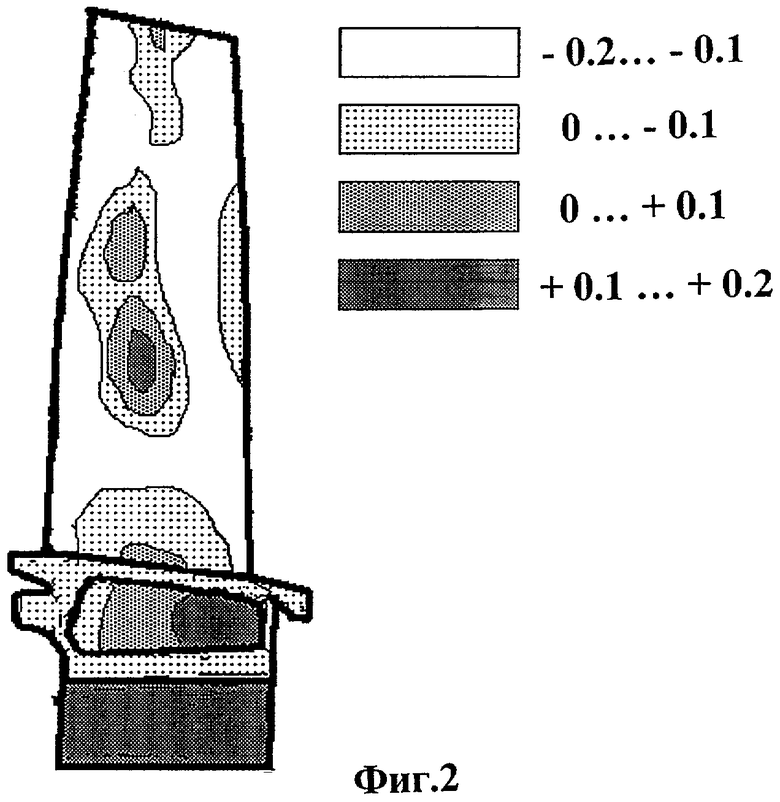
Изобретение поясняется фиг.1, на которой изображен общий вид установки, предназначенной для реализации предлагаемого способа, а также фиг.2 с представленной на ней светограммой, полученной в результате измерения тестируемого объекта.
Предлагаемый способ измерения формы поверхности объекта 1 и представления результатов измерения на упомянутой поверхности может быть реализован с помощью установки, состоящей из проекционного оптического устройства, формирующего изображения на измеряемой поверхности объекта 1, например, мультимедийного видеопроектора 2, устройства для регистрации изображения поверхности измеряемого объекта 1, в качестве которого может быть использована, например, цифровая видеокамера 3, информационно-вычислительной системы, например, компьютера (на чертежах не показан), осуществляющего оцифровку, хранение и обработку изображений, хранение координат точек эталонного образца, а также управление и контроль за процессом измерения.
Для охвата за один цикл измерения большей части поверхности измеряемого объекта или всей его поверхности может быть использовано несколько проекционных оптических устройств и/или устройств для регистрации изображения. А также может быть использовано специальное поворотное приспособление (на чертежах не показано), на котором устанавливается измеряемый объект 1 и которое позволяет развернуть его нужным образом.
Способ измерения формы поверхности объекта и представления результатов измерения на упомянутой поверхности осуществляется следующим образом.
В основе предложенного способа используется принцип бесконтактных измерений на базе триангуляционного метода со структурным освещением объекта (см. Патент РФ №2148793, 10.05.2000, G 01 B 11/24).
Поверхность объекта 1 размещают в поле освещения видеопроектора 2 и в поле зрения видеокамеры 3. На поверхность объекта 1 с помощью видеопроектора 2 проецируют распределение световой интенсивности, например, представляющее собой структурное изображение в виде черно-белых полос, изменяющихся в заданной последовательности. Видеокамеру 3 направляют на поверхность объекта 1 под некоторым углом к направлению освещения видеопроектором 2, что позволяет наблюдать деформированную картину полос.
С помощью видеокамеры 3 получают изображение поверхности объекта 1. При этом если поверхность объекта 1 соответствует эталонному образцу, то спроецированные полосы будут искажены так же, как и при установке эталонного объекта. Если поверхность объекта 1 не соответствует эталонному образцу, картина полос на объекте 1 будет отличаться от картины, соответствующей эталонному образцу.
Зная пространственное расположение видеокамеры 3, видеопроектора 2 и сопоставляя расположение соответствующих друг другу полос на изображении эталонного образца и установленного измеряемого объекта 1, можно по относительному смещению полос рассчитать разность координат между аналогичными точками поверхности эталонного образца и измеряемого объекта 1. Зная расположение видеопроектора 2 и измеряемого объекта 1, можно сформировать условную цветную картину (или картину интенсивностей света) отклонений и осветить ею измеряемый объект 1. Под интенсивностью света в данном случае (см. Большой энциклопедический словарь. Политехнический, Научное изд-во "Большая Российская энциклопедия", М., 1998 г., стр.197) понимается понятие, характеризующее распределение светового потока по поверхности (освещенность или светимость энергетическая).
В случае использования в качестве эталонного образца его математической модели картина полос может быть вычислена компьютером по форме эталонного образца, заложенного в его математической модели, и по расположению видеопроектора 2 и видеокамеры 3.
Относительное пространственное расположение видеокамеры 3 и видеопроектора 2 устанавливают путем проведения процедуры измерения на размещенном в зоне измерения специальном калибровочном объекте (на чертежах не показан).
Таким образом, полученное с помощью видеокамеры 3 изображение поверхности объекта 1 оцифровывают и запоминают результаты измерения в информационно-вычислительной системе, например, с помощью компьютера. Далее производят математическую обработку полученных оцифрованных изображений с помощью специально разработанного программного обеспечения, вычисляют координаты точек поверхности объекта 1, а также разность координат между вычисленными точками поверхности объекта 1 и ранее вычисленными идентичными точками образца (измерение и вычисление координат точек поверхности идентичного объекта, принятого за образец осуществляют аналогичным образом до осуществления операции измерения поверхности объекта 1), соответствующая отклонению измеренной поверхности от поверхности образца или от ее математической модели. Задают условно для каждой точки поверхности объекта цвет или интенсивность света в соответствии с полученным значением разности координат (см. фиг.2). Осуществляют проецирование с помощью того же видеопроектора 2 на поверхность объекта 1 полученного распределения цветов (пример данной реализации способа представлен на фиг.2, где приведен результат тестирования поверхности пера лопатки газотурбинного двигателя) или интенсивностей света, которое дает возможность наглядно определить величины отклонений формы поверхности объекта от образца или иные параметры поверхности объекта 1, характеризующие его форму.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ | 2010 |
|
RU2448323C1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ КОМПЛЕКСА БЕСКОНТАКТНЫХ ИЗМЕРЕНИЙ | 2006 |
|
RU2310815C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2010 |
|
RU2441199C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ЭЛЕКТРОННО-ПРОЕКЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ОБЪЕКТА | 2001 |
|
RU2216710C2 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1999 |
|
RU2148793C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ И/ИЛИ ДЕФОРМАЦИЙ ОБРАЗЦА ПРИ ВЫСОКОТЕМПЕРАТУРНОМ ВОЗДЕЙСТВИИ НА НЕГО И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2665323C1 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОГО ИЗМЕРЕНИЯ РАЗМЕРОВ И КОНТРОЛЯ ФОРМЫ ТЕЛА, ОГРАНИЧЕННОГО НАБОРОМ СВЯЗАННЫХ МЕЖДУ СОБОЙ ПОВЕРХНОСТЕЙ | 2013 |
|
RU2522809C1 |
| СПОСОБ ЛАЗЕРНОГО ВИДЕОИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ | 2007 |
|
RU2338998C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНОЙ ГЕОМЕТРИИ ВЫПУКЛЫХ И ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2019 |
|
RU2708940C1 |
Способ включает проецирование с помощью оптического устройства на поверхность объекта распределения световой интенсивности, регистрацию изображения освещенной поверхности объекта, визуализацию на поверхности объекта с помощью оптического устройства отклонений от измеренного ранее образца. Причем после регистрации изображения поверхности объекта вычисляют координаты точек поверхности объекта, а также разность координат между вычисленными точками поверхности объекта и ранее вычисленными идентичными точками образца. По результатам вычислений присваивают каждой точке поверхности объекта цвет или интенсивность света. По визуализации отклонений формы поверхности объекта от образца судят об отклонении формы поверхности объекта от образца. Технический результат - повышение производительности измерения за счет упрощения процесса измерения и повышения его достоверности и информативности. 2 з.п. ф-лы, 2 ил.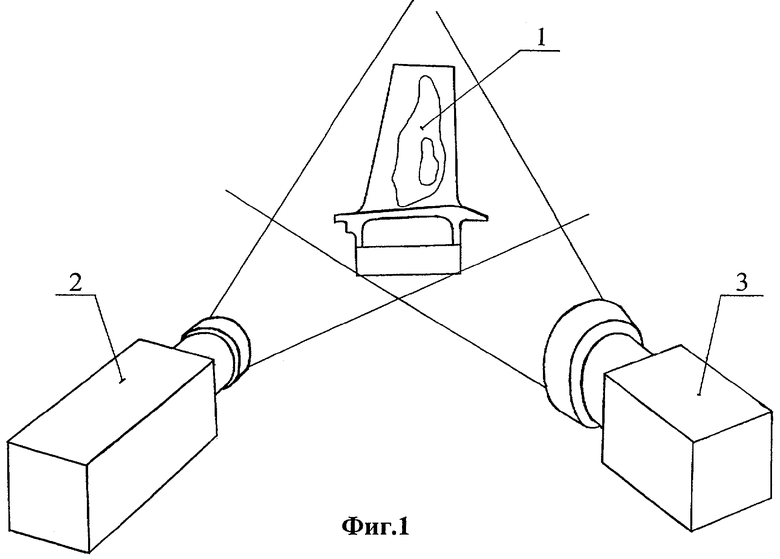
| СПОСОБ КОНТРОЛЯ РЕЛЬЕФА ПОВЕРХНОСТИ ОБЪЕКТА | 2003 |
|
RU2242714C2 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1999 |
|
RU2148793C1 |
| US 5612786 A, 18.03.1997 | |||
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ И РАСПОЗНАВАНИЯ ПОВЕРХНОСТЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199718C1 |

