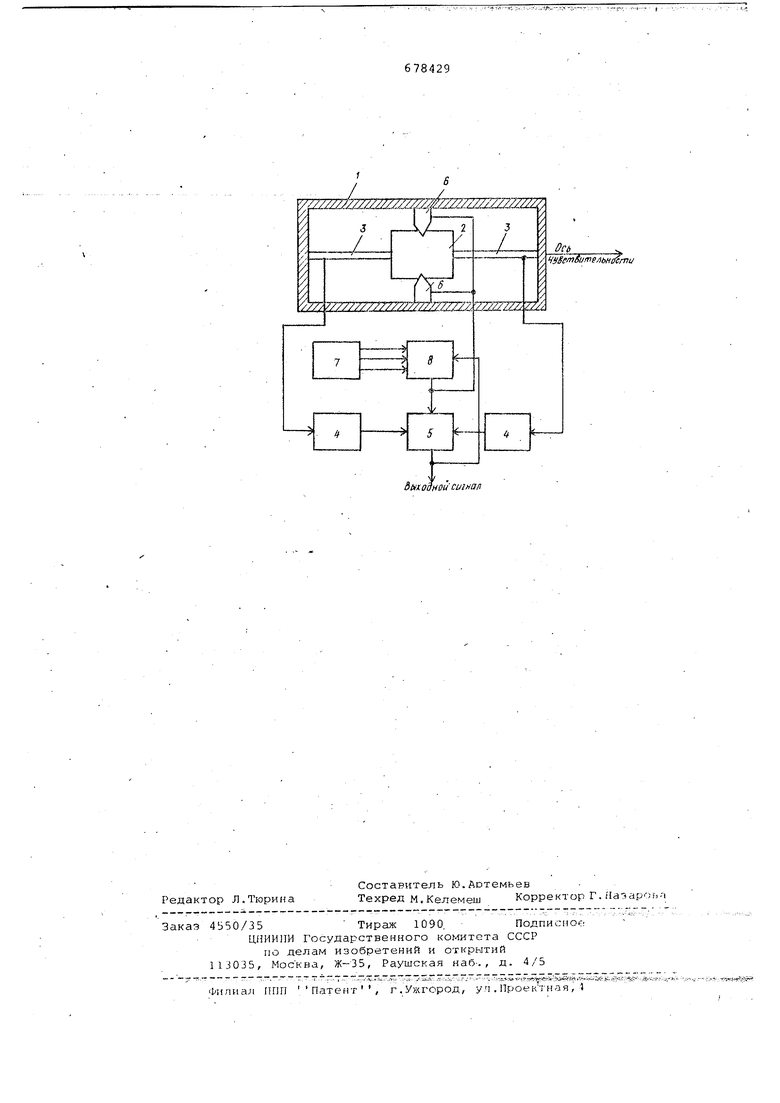
Изобретение относится к устройствам для измерения параметров движени и может быть использовано в системах управления летательных аппаратов. Известные пьезоакселерометры содержат инерционное тело, имеющее механические связи с корпусом акселерометра, которые осуществляются .лц:бр непосредственно через силовые элемен ты конструкции, либо с помощью упругих элементов (пружины, мембраны) l. Механические связи инерционного тела с корпусом датчика, как , вли яют на собственную резонансную часто ту датчика, на его точность и чувствительность. Наиболее ОлизкИМпо технической сущности является пьезоакселерометр, содержащий корпус, инерционное тело, механически связан ное с корпусом с помощью упругих мембран, два пьезорезонатора, расположенных по оси чувствительности симметрично по отношению к инерционному телу и связанных с генераторами которые подключены к схеме формирования выходного сигнала 2. Этот акселерометр имеет существенный недостаток, заключающийся в том, что пьезорезонаторы крепятся к инерционному телу через механически связанные с корпусом мембраны и при работе прибора в реальнцх условиях со стороны мембран действуют упругие си.лы, вызывающие динамические погрешности прибора. Кроме того, наличие мембран приводит к ограничению пороговой чувствительности акселерометра, т.е. к появлению статической погрешности прибора. Целью изобретения является повышение точности пьезоаксе.перометра. Поставленная цель достигается тем, что в прибор, содержащий корпус, инерционное тело, относительно которого по оси чувствительности акселерометра расположены пьеэорезонаторы, связанные с генераторами, подключенными к схеме формирования выходного сигнала, введены циклические фиксаторы инерционного тела, установленные перпендикулярно к оси чувствительности прибора, вибродатчйки и управляющая тактовая схема, входы которой подключены к выходам 1вибродатчиков и выходу схемы формирования выходного сигнала, а ее выход подключен к входам фиксаторов и одному из входов схемы формирования выходного сигнала. Введение в состав акселерометра циклических фиксаторов и исключение упругих мембран устраняет излигинюю связь инерционной массы с корпусом приббра на время измерения, уменьшает динамические погрешности прибора и увеличивает его пороговую чувствительность. На чертеже представлена структурно-кинематическая схема предлагаемог устройст-ва. ;„. .... Пьезоакселерометр содержит корпус 1, инерционное тело 2, пьеэорезонато ры 3, включенные в схемы двух генера торов 4 с начальным смещением собственных частот, схему 5 формирования выходного сигнала, циклические фиксаторы б инерционного тела, вибродат чики 7, управляющую тактовую схему 8 Выход схемы формирования выходногс сигнала является выходом устройства. При отсутствии ускорения сигналы генераторов 4 поступают на входы схемы формирования выходного сигнала Выходной сигнал начальной эазностной частоты поступает в бортовое вычислительное устройство (на чертеже не показано) для обработки информации, а также в управляющую схему 8, которая по сигналам от вибродатчиков .7 и блока выходных сигналов формирует управляющий сигнал, поступающий на входы циклических фиксаторов 6. Фиксаторы циклически освобождают и фиксируют инерционное тело 2. В очередном цикле измерения по сигналу от управляющей схемы 8 (при освобожденном инерционном теле;) схема 5 фор мирует начальный выходной сигнал в соответствии с начальными значения ми Сигналов генераторов 4. При -ускорении объекта по оси. чувствительности акселерометра при освобожденном фиксаторами инерционном теле 2 один пьезорезонатор испытывает деформацию сжатия, а другой - деформацию растяжения. Соответственно изменяются и частотй генераторов 4. Это приводит к изменению разностной частоты выходного сигнала и к изменёнию частоты функционирования фиксаторов. Управлякяцая схема 8 вырабатывает сигналы так, что частота фиксаторов растет с увеличением ускоре4ния. Изменение частоты функционирования фиксаторов учитывается в схеме формирования выходного сигнала 5. В интервалах времени между измерениями (когда инерционное тело зафиксировано) фиксаторы выполняют роль арретиров. Возможность изменения частоты фиксации и освобождения инерционного тела в зависимости от условий функционирования сообщает устройству свойство адаптации к этим услоВИЯМ. . . Использование в пьезоакселеромет-„ ре новых элементов и связей уменьшает динамические погрешности и увеличивает его пороговую чувствительность . Формула изобретения Дифференциальный пьезоакселерометр с частотным выходом, содержащий корпус, инерционное тело, относительно которого по оси чувствительности акселерометра расположены пьезорезонаторы, связанные с генераторами, подключенными к схеме формирования выходного сигнала пьезоакселерометра, отличающийся тем, что,С целью повышения точности пьезоакселерометра., в него введены циклические фиксаторы инерционного тела, установленные перпендикулярно к оси чувствительности-- акселерометра, -виб-- родатчики и управляющая тактовая схема, входьа которой подключены к выходам вибродатчиков и выходу схемы формирования выходного сигнала, а ее выход подключен к входам фиксаторов и одному из входов схемы формирования выходного сигнала. Источники информации, принятые во внимание при экспертизе 1.Иориш Ю.И. Виброметрия. Государственное научно-техническое издательство машиностроительной литературы., М., 1963, с. 559-578. 2.Кварцевый датчик ускорения ТУ РЦО. 252,0001ГУ. 1973, (НИИ Пьезотехники).
Y7JZZZZZZ ZZZIZ2ZZ 2ZZZSZZZL
ZZZZZZZZZ22ZZZ22ZnZ2
StufoaHOU cuiHon

| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр | 1977 |
|
SU624170A1 |
| Пьезоакселерометр с частотнымВыХОдОМ | 1978 |
|
SU794546A1 |
| Пьезоакселерометр | 1987 |
|
SU1458832A1 |
| Устройство для измерения абсолютного значения ускорения силы тяжести | 1978 |
|
SU771594A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УДАРНОГО ИМПУЛЬСА | 2006 |
|
RU2325660C1 |
| УСТРОЙСТВО КОНТРОЛЯ ДОПОЛНИТЕЛЬНОЙ НЕЛИНЕЙНОСТИ МИКРОЭЛЕКТРОМЕХАНИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ ЛИНЕЙНОГО УСКОРЕНИЯ ПРИ ИСПЫТАНИИ НА ВИБРОУСТОЙЧИВОСТЬ | 2014 |
|
RU2586262C2 |
| Способ определения коэффициента пре-ОбРАзОВАНия пьЕзОАКСЕлЕРОМЕТРА | 1979 |
|
SU838591A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПЬЕЗОАКСЕЛЕРОМЕТР С ЧАСТОТНЫМ ВЫХОДОМ | 1971 |
|
SU296037A1 |
| Устройство для измерения давления | 1988 |
|
SU1619081A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УДАРНОГО ИМПУЛЬСА | 2006 |
|
RU2325661C1 |