(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АБСОЛЮТНОГО ЗНАЧЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ранней диагностики образования и развития микротрещин в деталях машин и конструкциях | 2022 |
|
RU2788311C1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825143A1 |
| Дифференциальный пьезоакселерометр с частотным выходом | 1977 |
|
SU678429A1 |
| СИСТЕМА ОТСЧЕТА ТОЧНОГО ВРЕМЕНИ | 1987 |
|
SU1840350A1 |
| Измерительный преобразователь неэлектрических величин с емкостным датчиком | 1990 |
|
SU1795381A1 |
| ЦИФРОВОЙ СИНТЕЗАТОР ИЗМЕНЯЮЩЕЙСЯ ЧАСТОТЫ | 2023 |
|
RU2809550C1 |
| Гравиметр | 1982 |
|
SU1121639A1 |
| Устройство для считывания изображений | 1988 |
|
SU1645979A1 |
| АУДИОМЕТР | 2022 |
|
RU2791159C1 |
| ЦИФРОВОЙ СИНТЕЗАТОР ИЗМЕНЯЮЩЕЙСЯ ЧАСТОТЫ | 2021 |
|
RU2765264C1 |
1
Изобретение относится к области гравиметрии и может быть использовано при определении абсолютного значения ускорения силы тяжести на объектах, движущихся по земной или водной 5 поверхности.
Известно, что использование на подвижных объектах приборов,основанных на наблюдении двух одновременно качакнцихся маятников ij или одного Ю качающегося маятника, с введением в показания прибора поправки на горизонтальные ускорения второго порядка самой платформы 23 затрудняет автоматизацию и повышение быстродействия 15 а также устранение влияния колебаний движущегося основания на колебания маятника прибора.
Другие известные приборы, предназначенные для определения ускорения 20 силы тяжести, в которых фиксируется положение равновесия постоянной массы, удерживаемой силой упругости какого-либо тела, не используются на подвижном основании из-за необходи- 25 мости введения в измеряемую величину различных поправок, для определения которых затрачивается много времени.
Известны гравиметры, обеспечиваю цие высокую точность измерений, но 30
не работающие при установке их на движутчихся объектах. К ним относится наиболее близкое по техническому ре-, шению к предлагаемому прибору устройство рЗ, реализующее метод сво- . бодного падения тела. Оно содержит вакуумную камеру с установленными в ней подвижным инерционным телом и фиксаторами, тактовый генератор и счетчик импульсов пути, подключенные к KOMT/syTaTopy, схеме формирования выходного сигнала и к схеме Формирования сигнала о шумах движения, имеюгчей вход g С)
Это устройство не позволяет измерять ускорение силы тяжести с высокой точностью на подвижном объекте в связи с высоким уровнем шумов движения.
Цель изобретения - повышение точности измерений на подвижном основании при использовании емкостных датчиков перемещений.
Для достижения этой цели в устройство введены схема циклического включения фиксаторов с управляющим входом, два емкостных датчика перемещения инерционного тела, два генератора синусоидальных сигналов, смеситель и схема управления частотой тактового генератора, причем упре1влякзщий ВХОД схбмы включвния фиксаторов соединен с одним из выходов тактового генератора, выходы схемы включения Ликсаторов подключены к входам соответствующих фиксаторов, емкостные датчики включены в схемы соответствующих генераторов синусоидальных сигналов, выходы которых соединены со входами смесителя, подключенного к коммутатору. Выход схемы формирования сигналов о шумах движения подключен к входу схемы управления частот тактового генератора, выходы которой подключены к входам тактового генератора и схемы формирования выходного сигнала.
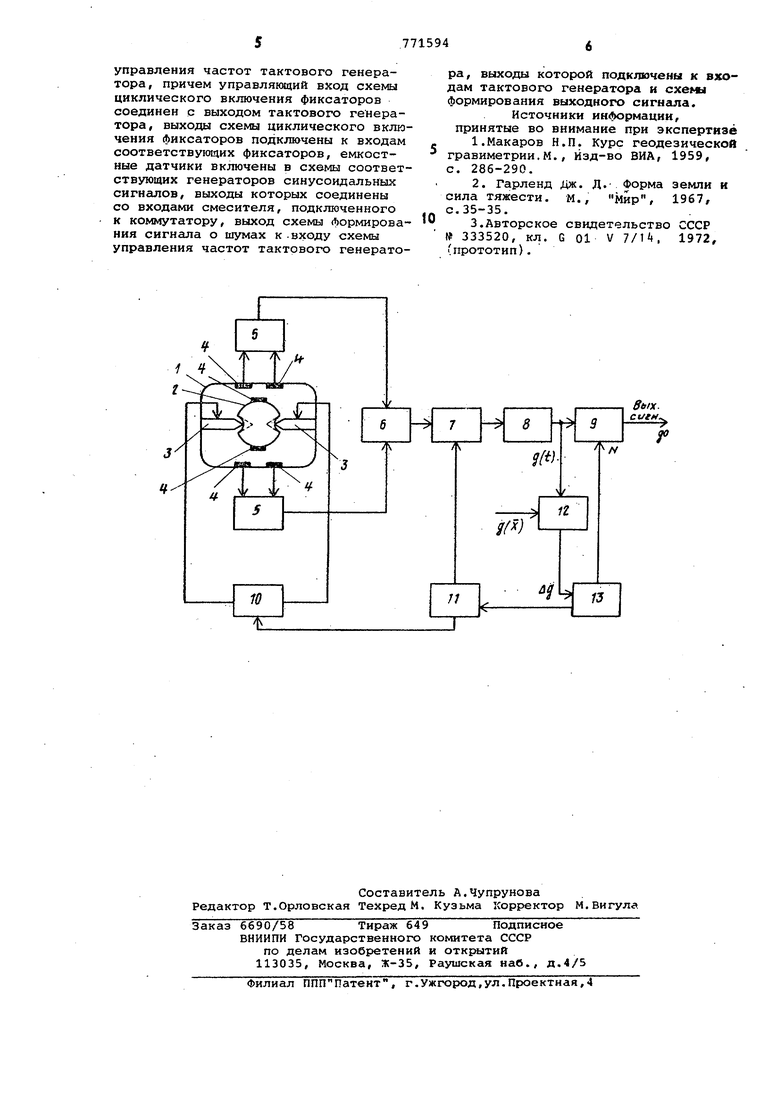
На чертеже показана схема предлагаемого устройства.
Устройство содержит вакуумную камеру 1, подвижное инерционное тело 2, Ликсаторы 3 контактного или неконтактного типа) пластины 4 емкостных датчиков, генераторы 5 синусоидальных сигналов, смеситель 6, коммутатор 7, счетчик 8 импульсов пути, схему 9 формирования выходного сигнала, схему 10 циклического включения фиксаторов, тактовый генератор 11, схему 12 формирования сигнала о шумах движения, схему 13 управления частот тактового генератора.
Управляющий вход схемы 10 циклического включения Ликсаторов соедине с выходом тактового генератора 11, выходы cxeNttJ 10 подключены к входам соответствующих фиксаторов 3, пластины 4 емкостных датчиков включены в схемы соответствующих генераторов 5 синусоилальных сигналов, выходы которых соединены со входами смесителя 6, подключенного через коммутатор 7 к счетчику 8 импульсов пути. Последний соединен с входом схемы 9 Формирования выходного сигнала и с входом схемы 12 формирования сигнала о шумах движения. Выход схемы 12 соединен со входом схемы 13 управления частот тактового генератора, выходы которого подключены к входу схемы 9 формирования выходного сигнала и к входу тактового генератора 11,один из выходов которого, в свою очередь подключен к входу коммутатора 7.
Измерение ускорения силы тяжести предлагаемым устройством производится циклически, в очередном цикле измерений сигнал с выхода схемы 13 управления частот тактового генератора подается на запуск тактового генератора 11 и на фиксаторы 3 инерционного тела 2, которые освоГ5ождают последнее на заданное время. Под действием датчиков тело перемещается относительно ьластин 4 емкостных датчиков,жертко соединенных с корпусом прибора. При этом изменяются величины емкостей датчиков, что приводит к изменению собственных частот генераторов 5 сиаусо.кдальных сигналов. На выходе смесителя 6 образуется сигнал разностной частоты, изменение которой пропорционально изменению , положения инерционного тела 2. Этот сигнал подается на вход коммутатора 7. По сигналу такторого генератора 11 коммутатор 7 подключает выход смесителя 6 к входу счетчика 8 на
время измерений. По окончании этого
времени по сигналу тактового генератора 11 KONwyTaTOp 7 отключает смеситель б от счетчика 8. Через некоторое время от схемы 10 циклического включения фиксаторов подается сигнал
5 на фиксаторы 3, которые возвращают подвижное инерционное тело 2 в исходное положение. Содержимое счетчика импульсов пути подается на схему 9 формирования выходного сигнала, коQ торая формирует в требуемом виде сигнал, несущий информацию о величине ускорения силы тяжести по данным одного или нескольких циклов в зависимости от сигнгша, подавае. мого с выхода cxeNSJ 13 управления
частот тактового генератора. Содержимое последнего сигнала зависит от сигнала о шумах движения с выхода схемы 12, формируемого по данным с выхода схемы 8 и по информации g(x).,
Количество циклов измерений определяется требуемой точностью, условиями функционирования прибора на подвижном основании и используемыми алгоритмами обработки его выходных
5 сигналов.
Положительный эффект при реализации предложенного устройства заключается в повышении точности измерений ускорения силы тяжести на Подвижном основании при использовании емкостных датчиков перемещений в одном цикле и за счет использования сигнала о шумах движения для управления режимом работы фиксаторов и
45 схемы формирования выходного сигнала.
изобретения
Формула
Устройство ДЛЯ измервния абсолютного значения ускорения силы тяжести, содержащее вакуумную камеру с установленным в ней подвижным инерционным телом и фиксаторами, тактовый генератор и счетчик импульсов пути, подключенные к коммутатору, схеме формирования выходного сигнала и к схеме формирования сигнала о шумах движения, отличающееся тем, что, с целью повышения точности измерений на подвижном основании, в нем установлены схема циклического включения фиксаторов, два емкостных датчика перемещения инерционного тела, два генератора синусоидальных сигналов, смеситель и схема
управления частот тактового генератора, причем управляющий вход схемы циклического включения фиксаторов соединен с выходом тактового генератора, выходы схемы циклического включения фиксаторов подключены к входам соответствующих фиксаторов, емкостные датчики включены в схемы соответствующих генераторов синусоидальных сигналов, выходы которых соединены со входами смесителя, подключенного к коммутатору, выход схемы формирования сигнала о шумах к -входу схемы управления частот тактового генератора, выходы которой подключены к входам тактового генератора и схемы формирования выходного сигнала.
Источники информации, принятые во внимание при экспертизе . 1.Макаров Н.П. Курс геодезической гравиметрии.М., Йзд-во ВИД, 1959, с. 286-290.
