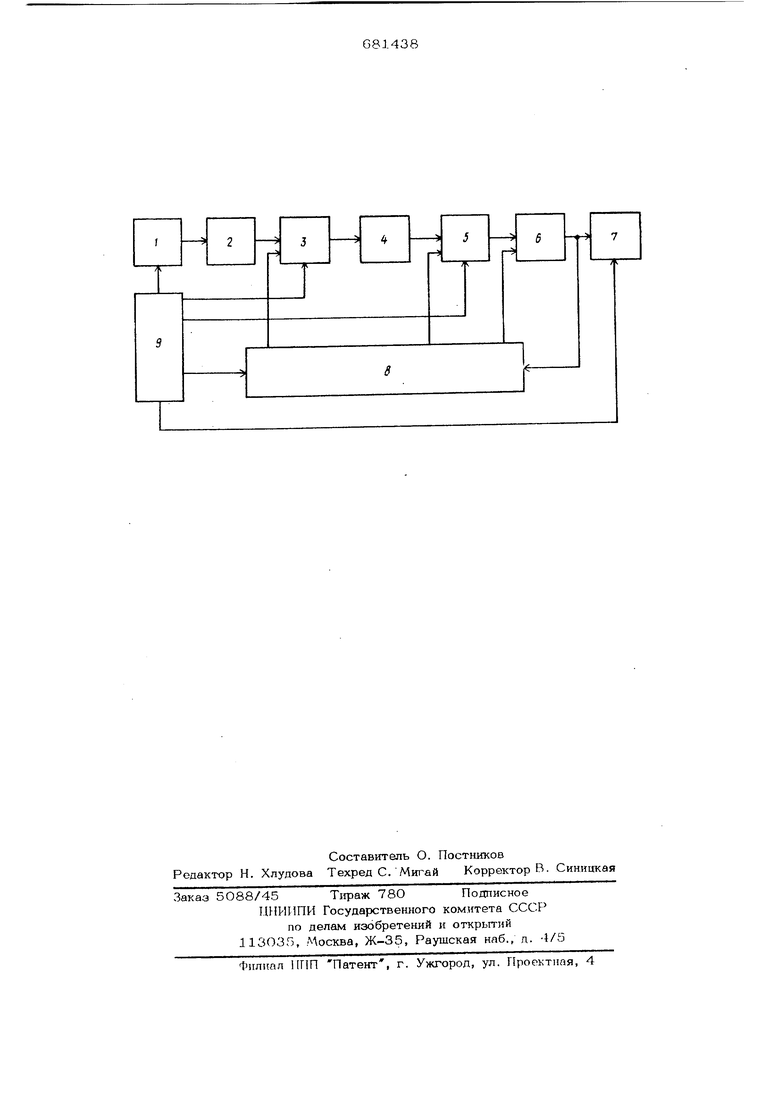
Изобретение относится к технической кибернетике, в частности к устройствам для распознавания образов, и может быть использовано при поиске месторождений, в медицинской и технической диагностикеИзвестно устройство для распознавания образов, содержащее блоки воспроизведения, оптическую систему, преобразователь изображений, пространственный ин тегратор, фотоприемник, генератор тактовых импульсов, блок памяти и блок вычитания i. Недостатком такого устройства является его сложная конструкция и низкая точность, т. к. изображения проецируютс площадно, а не точечным сканированием пуча, поэтому распознавание материала в виде графических узких линий невозможно . Наиболее близким к предлагаемому является устройство, со тержашее первые сумматоры, входы которых соединены с блоком синхронизации п г порвым комму татором, а выходы подключены к второ му коммутатору, и последовательно соединенные интеграторы, блоки регистрашш, синхронизации и блок информации, выход которого подключен к первому коммутато- РУ 2. Однако это устройство характеризуется недостаточно высокой надежностью распознавания. Цель изобрете1шя - повышение надежности распознавания. Это достигается тем, что устройство содержит вторые сумматоры, соединенные с блоком синхронизации, интеграторами и с вторым коммутатором, и блок формирования пороговых сигналов, входы которого подключены к И1ггсграторам и блоку синхронизации, а выходы соединены с входами всех cyNiMBTOpoB и интеграторов. На чертеже дана структурная схема устройства. Оно содержит блок I вво;;п иифо мации, первый коммутатор 2, сумматоры 3, второй кoм yтaтop }, uTopi.io сумматоры 5, интеграторы 6, блок 7 регистрации, блок 8 формировагшя пороговых сигналов и блок 9 синхронизации. Устройство работает следующим образом. В блоке 1 ввода информации осуществляется считывание точек кривых носителя информации. Полученные сигналы усиливаются и с помощью первого коммутатора 2 случайно перераспределяются на любой из положительных или отрицательных каналов первых сумматоров 3 на его элементарные пороги. Пропущенные этими порогами сигналы суммируются сумматорами 3 и выдаются на пороговые элемен ты, входящие в первые сумматоры. В них происходит фильтрация неправильных решений и предварительная классификация объектов. С выхода каналов первых сумм торов напряжения с помощью второго коммутатора 4 случайно перераспределяются на любые входы йо ложительных или отрицательных каналов вторых сумматоров 5 на входы их элементарных порогов Пропущенные этими порогами напряжения суммируются сумматорами 5 и вьщаются на выходные пороговые элементы каждого сумматора. В сумматорах 5 происходит фильтрация неправильных решений и предварител ная классифтсаиия объектов, с выходов каналов вторых сумматоров напряжения поступают на элементарные пороги интеграторов 6. В интеграторах 6 происходит окончательная фильтрация неправильных рещеиш и окончательная классификация объектов обнаружения, т.е. распознавание и выделение. Величина напряжения одного из пороговых элементов интеграторов 6 выдается в блок 7 регистрации, на один из его каналов классификации, которые выявляются при обучении устройства. Обучение устройства заключается в настройке элементарных порогов и пороговых элетлентсв сумматоров 3, 5 и интеграторов 6, которая происходит на основе случайного поиска коэффициента веса значений алиментарных порогов и пороговых элементов и осуществляется в момент обучения в процессе изменения ВЫХОДНЫХ величин напряжетшй интеграторов с помощью блока 8 формирования пороговых сигналов (уровней). Число пришедших сигналов устанавливается также в режиме обучения с помощью коммутаторов 2, 4. Режим обучения ведется до тех пор, пока значения напряжений с выхода интеграторов 6 лри пропускании материалов об известном объекте классификации не станут постоянными и наиболее близкими и характерньпии . данному объекту. С помощью блока 9 синхронизации происходит тактовое включение отрицательных и положительных каналов сумматоров 3 и 5, а также управление режимом работы блоков 1, 7 и 8 ввода информации, регистрации и формирования пороговых сигналов (уровней) соответственно. Введение новых блоков и новых конструктивных связей позволяет существенно повысить точность и надежность устройства. Формула изобретения Устройство для распознавания образов, содержащее первые сумматоры, входы которых соединены с блоком синхронизации и с первым коммутатором, а выходы подключены к второму коммутатору, и последовательно соединенные интеграторы, блоки регистрации, синхронизации и блок ввода информации, выход которого подключен к первому коммутатору, отличающееся тем, что, с целью повышения надежности распознавания, оно содержит вторые сумматоры, соединенные с блоком синхронизации, с интеграторами и с вторым коммутатором, и блок формирювания пороговых сигналов, входы которого подключены к интеграторам и к блоку синхронизации, а выходы соединены с входами сумматоров и интеграторов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 516О66, кл. Q Об К 9/ОО, 1974. 2.Патент США № 39О5О45, кл. 444-1, опубл. 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознавания образов | 1977 |
|
SU732925A1 |
| Устройство для распознавания образов | 1978 |
|
SU811298A1 |
| Устройство для сейсмической разведки | 1988 |
|
SU1548759A1 |
| Устройство для распознаванияОбРАзОВ | 1979 |
|
SU834728A1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРИЧЕСКОЙ РАЗВЕДКИ | 1987 |
|
RU2018884C1 |
| Устройство для распознавания образов | 1980 |
|
SU1043691A1 |
| Устройство для распознавания образов | 1980 |
|
SU896647A1 |
| СПОСОБ СЕЛЕКЦИИ ПРИЗНАКОВ ОБЪЕКТОВ | 1990 |
|
RU2030788C1 |
| Система обнаружения гидроакустических сигналов и их нейросетевой классификации | 2018 |
|
RU2681252C1 |
| Нейросетевая система обнаружения и оперативной идентификации морских целей | 2018 |
|
RU2695985C1 |