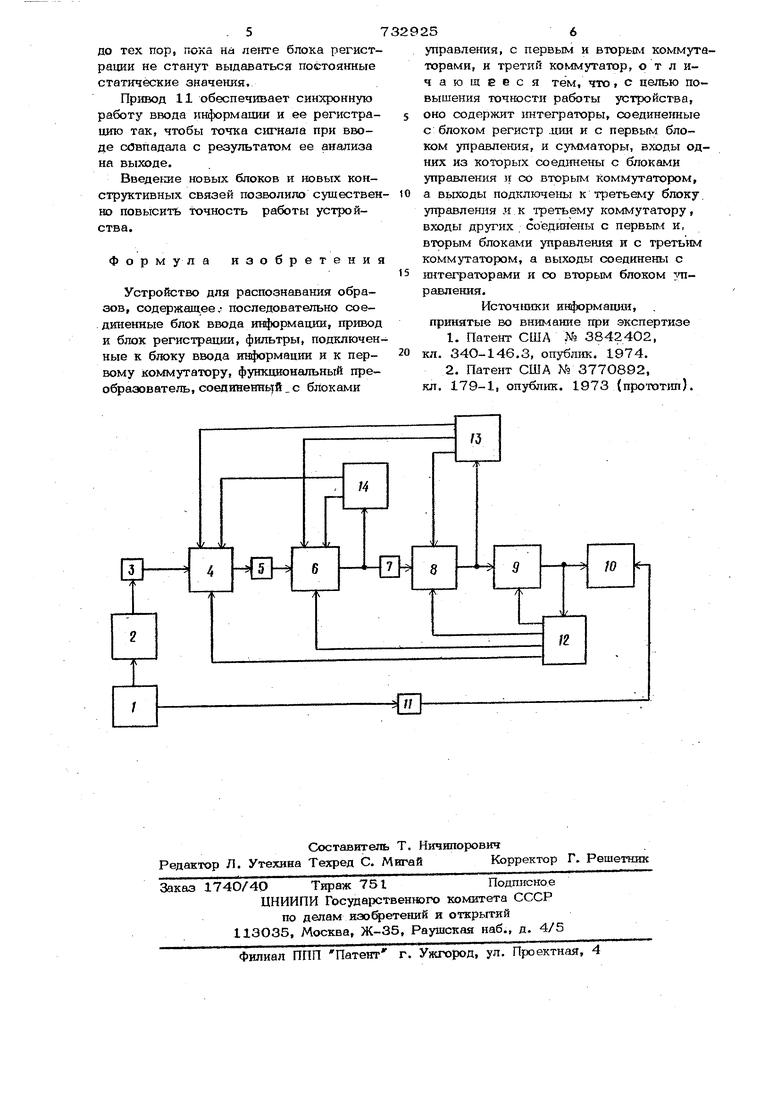
(54) УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ОБРАЗСВ Изобретение относится к области тех нической киГэрнетики и может быть использовано при поиске полезных месторождений, в медипиаской и технической диагностике. Известно устройство для распознава1тя образов, содержащее блок ввода информации, соединенный через блок фяльтрапии с блоком обработки, выполне ным в виде последовательно соединенных nejiDHX и вторых сумматоров, входы кот рых подключены к блокам управления и синхронизации, интеграторы, выходы которых подключены к блоку принятия решений я к блоку управления l. Наиболее близким по технической сущнрстй к изобретению является устройство , сояержашее последовательно соединенные блок ввода информации, при вод и блок рвгнстрацян, фильтры, подхлюпенные к блоку ввода шфгрмации и К первому коммутатору, функциональный поообразователь, соединет&тй с блоко, управления, с первым и вторым коммутаторами, и третий коммутатор 2. Однако точность работы таких устройств недостаточна. Цель изобретения состоит в повышение точности работы устройства. Поставленная цель достигается тем, что предложенное устройство содержит интеграторы, соединенные с блоком регистрации и с первым блоком управлег ния, и сумматоры, входы одних из которых соединены с блоками управления и со вторьш коммутатором, выходы подключены к третьему блоку управления и к третьему коммутатору, входы других соединены с первым и вторым блоками управления и с третьим коммутатором, а выходы подключены к интеграторам и ко второму блоку управления. На чертеже представлена структурная схема устройства. Устройство содержит блок ввода информации, 1, фильтры 2, первый коммутатор 3, функциональный преобразователь 4, второй коммутатор 5, первые cyiviMaTopbi 6, третий коммутатор 7 вторые сумматоры 8, интеграторы 9, блок регистрации Ю, приьод 11 и первый 12, второй 13 и третий 14 блоки управления
Устройство работает следующим образом.
В блоке .ввода информации 1 электрический сигнал (информация об исследуемом объекте) либо сшгмается сразу с датчиков на месте поиска объекта обнаружения, либо воспроизводится с ленты магнитофона (запись сделана на месте поиска). Электрический сигнал из блока 1 поступает на фильтры 2, где происходит его разложею1е ci-ютемой острорезонансных фильтров на отдельные гармонические составл5пош;ие,, которые затем усиливаются. В фильтрах 2 и футсциональном преобразователе 4 происходит частичная фильтрация сигнала от помех и выделение признаков распознаваемого объекта по его спектральным и динамчгческим характеристикам. С выхода фильтров 2 сигналы через коммутатор 3 поступают на входы каналов преобразователя 4, В- каждом канале поступающий сигнал выделяется временными ячейками элемента задержки, причем время выделения равно времени разложения сигнала в спектр. С отводов временных ячее1с сигнал поступает на элементарные пороги, которые пропускают или задерживают выделенные во времени сигналы,т.е. происходят втор.ичная фильтрация сигна/ш от помех-и выделение признаков объектов. Сигналы .с элементарных порогов поступшо.т на вкод сумматора преобразователя, работающего в данном слу-iae в режиме умьюжителя. С выхода этого сумматора сигналы поступают снова на входы элементов задержки и вьщелещые его временньтми ячейками через коммутатор -5 случайно перераспределяются на любой из каншюв суммаэх)ров 6 на его элe IeнтaplПзIe пороги. Пропущшшые этими порогами сигналы cyh/iмируются сумматорами 6 и выдаются на пороговый элемент, входящий в сумматоры 6. В них происходит фильтрация неправнльньпс рещений и предварительная класс1фшаций объек1Х)В. С вьрсода каналов сумматоров 6 напржкешга с помощью коммутатора 7 случайно перераспределяются на любые входы каналов сумматоров 8 на входы их элементарных порогов. Пропу|денные этими порогами напряжения суммируются сумматорами 8 и выдаются на выходной пороговый элемент.
В этих сумматорах происходит фильтрация неправильных решений и предварительная классифтсация объектов. С выхода каналов сумматоров 8 напряжения поступают на элементарные пороги интеграторов 9. С каждого интегратора 9 напряжение поступает на пороговый элемент,
В интеграторах 8 происходит oKOH iaтатьная фильтрация неправильных реЩений и окончательная классифика&я объектов обнаружения, т.е. их распознавания и выделение. Величина напряжения одного из порогов выдается в блок регистрации 10, на один из его каналов классификации, когорые выявлязотся при обучении устройства.
0Благодаря введенному пршщипу неоднократных решений, т.е. анализа иссле- .дуемого сигнала, несущего информацию об объекте распознавания, всеми решаю- щими блоками устройства и благодаря
обучению всех блоков устройства на основе выходных величин с кахадого выше стоящего бло1са с последующим изменением .передаточных фушщий ннжестошдих блоков с помощью трех блоков управления
О в обратных связях достигается 1ОО% распознава1-ше, т.е. выделение и обнаружение даже самых сложных -топологических объектов, например выделения нефти из водонефтяного коллектора, с-компонен5 тами входящими друг в друга (до 80-90%),
Обучение устройства ведется на основе сигналов (материалов информации известных объектов классификашш). Обучение заключается в настройке величин временных ячеек элементов задержек, элементарных порогов и пороговых элементов с помощью трех блоков управлеш я 12, 13, 14 в преобразователе 4, cyMh-iaTOpoB 6 и 8 и интеграторов 9. Число прншедщих сигналов и число связей устанавливаются также в режиме обучения с помощью коммутаторов 5, 7.
В режиме обучения устанавливают, что значения напряжений с выхода блоков при пропускании материалов об известном объекте классификашш быть постоянными и наиболее близкими н характерными для данного объекта. Однако в первый период обучения они изменяются. Эти изменения ф1пссируются блоками управления 12-14, а вьфаботанные этими блоками значения изменяют параметры элементов блотков устройства до тех пор, пока на ленте блока регист рации не станут выдаваться постоянные статические значения. Привод 11 обеспечивает синхронную работу ввода информации и ее регистрацию так, чтобы точка сигнала при вводе совпадала с результатом ее анализа на выходе. Введение новых блоков и новых конструктивных связей позволило существен но повысить Точность работы устройства. Формула изобретени Устройство для распознавания образов, содержащее, последовательно соединенные блок ввода информации, привод и блок регистрашш, фильтры, подключен ные к блюку ввода информации и к первому коммутатору, функциональный преобразователь, соединеШ1Ь1 й с блоками 25 управле гая, с первьм и вторым коммутаторами, и третий коммутатор, от л ичаюшееся тем, что, с целью повышения точности работы устройства, оно содержит 1штеграторы, соединенные с блоком регистр лш и с первым блоком управления, и су шаторы, входы одних из которых соештаены с блоками управления и со вторьш коммутатором, а выходы подключены к третьему блоку управленля и к третьему коммутатору, входы других . соедгогены с первьш и, вторым блоками управления и с третьим коммутатором, а выходы соединены с интеграторами и со вторым блоком лт1 равления. Истчэчники информации, принятые во внимаш е при экспертизе 1.Патент США № 3842402, л. 34О-146.3, опублнк. 1974. 2.Патент США KV 3770892, л. 179-1, опублик. 1973 (прототт).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознавания образов | 1976 |
|
SU681438A1 |
| Устройство для сейсмической разведки | 1988 |
|
SU1548759A1 |
| Устройство для распознавания образов | 1978 |
|
SU811298A1 |
| Устройство для распознавания образов | 1980 |
|
SU1043691A1 |
| Устройство для распознаванияОбРАзОВ | 1979 |
|
SU834728A1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРИЧЕСКОЙ РАЗВЕДКИ | 1987 |
|
RU2018884C1 |
| Обучающаяся структура | 1975 |
|
SU596942A1 |
| Устройство для распознавания образов | 1980 |
|
SU896647A1 |
| Система обнаружения гидроакустических сигналов и их нейросетевой классификации | 2018 |
|
RU2681252C1 |
| Нейросетевая система обнаружения и оперативной идентификации морских целей | 2018 |
|
RU2695985C1 |
