Звеньями (на чертеже не показаны), кинематически связанными со штоками подпружиненного арретира 8.
Внешняя рамка 3 содержит поднружниенный арретир 9, установленный с возможностью воздействия на арретир 8. При помош,и уиора 10, расположенного в прорези основания 11 корпуса 1, внешняя рамка 3 ограничена во враш,ении на угол ;360°, а внутренняя рамка 2 упорами 12 и 13 ограничена во враш,ении относительно внешней рамки 3 на угол 360°(.
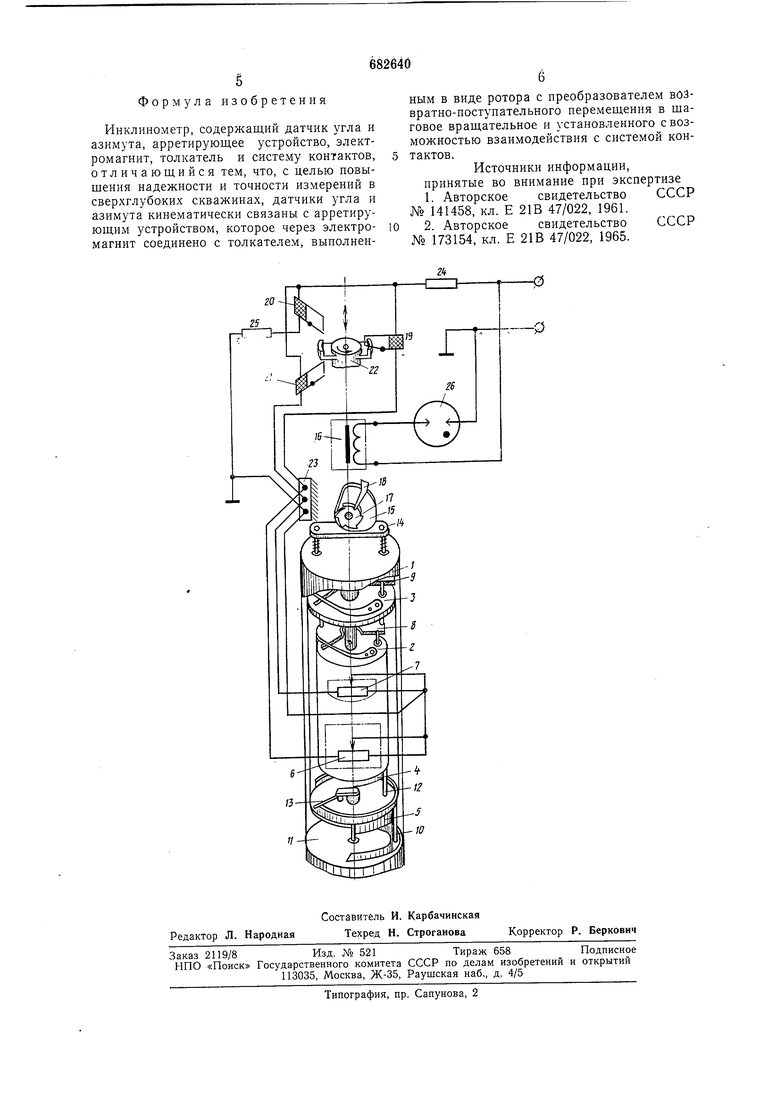
Корпус 1 содерл ит подпружиненный арретир 14 с возможностью воздействия на арретир 9. Арретир 14 предназначен для фиксации измерительной системы и перемешается при помощи кулачка 15, приводимого в движение прямоходовым электромагнитом 16. Кулачок 15 жестко связан с храповым колесом 17, которое под воздействием собачки 18 прн включении электромагнита 16 может поворачиваться относительно своей оси на Ve окружности.
Контактная система предлагаемого инклинометра выполнена в виде расноложенных но окружности через 120° нормально разомкнутых контактных пар 19-21, а толкатель - в виде ротора 22, установленного поворотно на оси, соединенной с подпружиненным якорем (на чертеже не ноказаны) электромагнита 16. Ротор 22 снабжен механизмом (на чертеже не показан), преобразуюш,им возвратно-поступательное перемещение последнего в шаговое враш.ательное движение на Ve окружности за время срабатывания электромагнита 16. Ротор 22 на лобовой поверхности имеет два диаметрально нротивоположных выступа, которыми он иоочередно ири обесточиваиии обмотки электромагнита 16 замыкает одну из контактных нар 19, 20 или 21.
Электрическая схема инклинометра обеспечивает дистанционное измерение углов и азимутов, контроль и управление работой прибора. Реохорды 6 и 7 датчиков угла н азимута электрически связаны ири номош,и маломоментных токоотводов, размеш;енных между штоками толкателей, с жесткими контактами электроизоляционной платы 23 и через контактные пары 19 и 21 в.месте с балластным сопротивлением 24 подключаются к четвертому илечу равновесного моста наземной измерительной панели (на чертеже не ноказаны) через центральную жилу кабеля (ЦЖК) и оплетку кабеля (ОК).
Для расширения диапазона измеряемых углов и обеспечения возможности оперативной компенсации сопротивления жилы кабеля, а следовательно, и уменьшения времени цикла измерений, реохорды 6 и 7 могут иметь одинаковое сопротивление. В этом случае для определения подключаемого к измерительной цепи датчика инклинометр должен быть снабжен индикаторным резистором 25, сопротивление которого отличается от сопротивлений реохордов 6 и 7. Спловая цепь инклинометра состоит из электромагнита 16 и последовательно включенного с ним разрядника 26.
Описанный инклинометр работает следуюшим образом. Примем за исходное то положение кулачка 15 и ротора 22, которое изображено на чертеже. В этом случае измерительная система разарретирована и в измерительную цепь через замкнутую контактную пару 19 включено полное сопротпвление реохорда 6 датчика угла. В этой позиции производят компенсацию сопротивления жилы кабеля.
При подаче импульса напряжения от источника питания на обмотку электромагнита 16 последний срабатывает после зажигания разрядника 26. В результате чего
храповое колесо 17 под действием собачки
18, кинематически связанной с якорем
электромагнита 16, поворачивает кулачок 15
на Ve окружности. Кулачок фиксирует измерительную систему путем оказания носледовательно передаваемого воздействия арретиров 14, 9 н 8 на фиксируюш,ие звенья датчиков угла и азимута. При этом ротор 22 разомкнет контактную пару 19 и, совершая возвратно-поступательное и вращательное движения (по направлениям, указанным на чертеже стрелками) после обесточивания обмотки электромагнита, замкнет контактную пару 21, включая в измерительную цепь участок реохорда 7. Азимут пропорционален измеряемому в этой позиции сопротивлению участка реохорда 7.
При вторичном срабатывании электромагнита 16 измерительная система останется в заарретированном состоянии, а ротор 22 замкнет контактную пару 20, включая в измерительную цепь индикаторный резистор 25. При третьем срабатывании электромагнита 16 измерительная система сохранит заарретированное состояние, а ротор 22 замкнет исходную контактную пару 19. Прн этом в измерительную цепь окажется включенным участок реохорда 6. Из.меряемое
сопротивление этого участка пропорционально углу отклонения инклинометра.
При четвертом срабатывании электромагнита 16 измерительная система приобретает способность свободной ориентации датчиков
в пространстве, а ротор 22 замыкает контактную пару 21, включая в измерительную цепь полное сопротивление реохорда 7 датчика азимута. При пятом срабатывании электромагнита
16 в измерительную цепь включается сопротивлеиие индикаторного резистора 25. При шестом срабатывании электромагнита 16 кулачок 15 переключающего механизма и ротор 22 возвращаются в исходное состояние.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инклинометр | 1990 |
|
SU1723317A1 |
| Инклинометр | 1983 |
|
SU1145124A1 |
| Устройство для ориентации сейсмоприемников в скважинах | 1982 |
|
SU1124236A1 |
| ИНКЛИНОМЕТР для ИССЛЕДОВАНИЯ СВЕРХГЛУБОКИХ^'-•.::v'-'!pi.'*/СКВАЖИНI b-.5Ai,ri::;A | 1965 |
|
SU173154A1 |
| Инклинометр | 1982 |
|
SU1102914A1 |
| Инклинометр | 1991 |
|
SU1800014A1 |
| Датчик азимута инклинометра | 1984 |
|
SU1218088A1 |
| Инклинометр | 1982 |
|
SU1089247A1 |
| Инклинометр | 1984 |
|
SU1469108A1 |
| Инклинометр | 1980 |
|
SU972068A1 |
