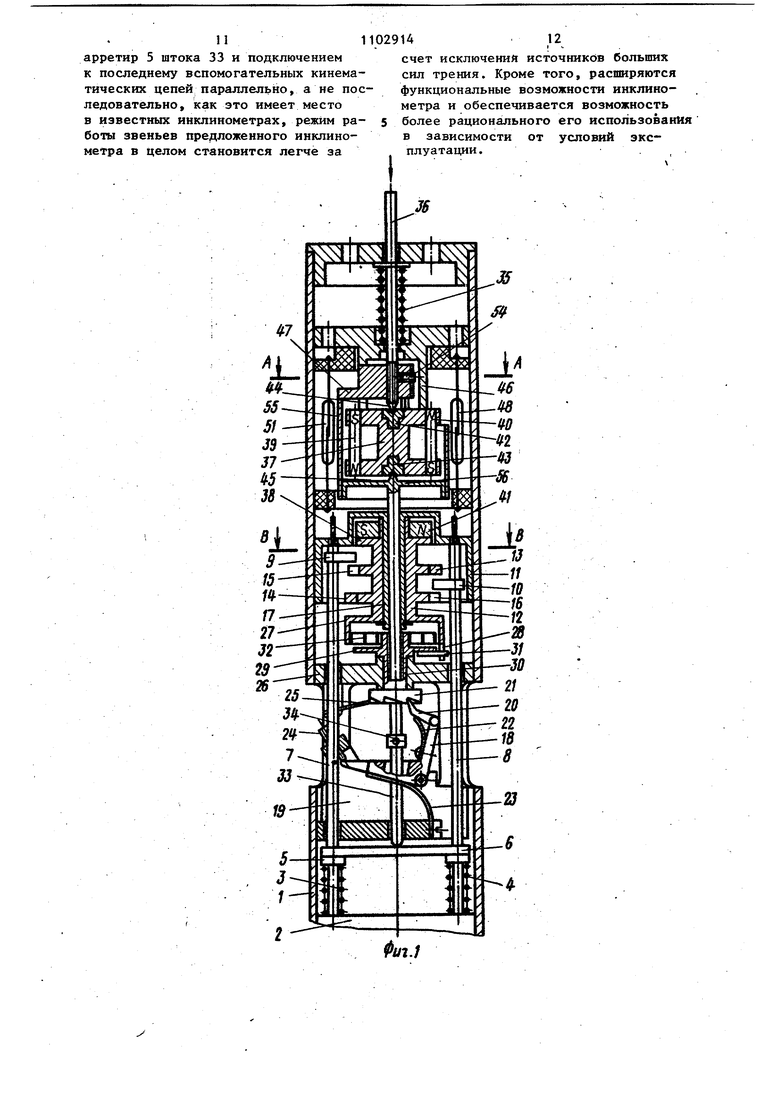
Изобретение относится к геофизическим скважинным приборам для измерения углов и азимутов искривления . скважин. Известны инклинометры, предназначенные для исследования сверхглубоких нефтяных и газовых скважин с осо быми условиями Cl3. Наиболее близким по технической сущности к предлагаемому является инклином1етр, содержащий корпус, в котором размещен измерительный блок, связанный с подпружиненным арретиром имеющим опорный элемент, соединенный черрз кинематическую связь с фиксирунхцим узлом, который соединен с ком мутатором и штоком электромагнита С 2 J Однако известный инклинометр не обладает достаточной надежностью при эксплуатации в сверхглубоких скважи нах с особыми условиями (забойной температурой 250с и вьше, гидростатическим давлением 150 МПа и более, малым конечным диаметром ствола). Это объясняется тем, что из-за наличия значительных сил трения, возникакхцих при взаимодействии опорной части арретира с выступами ролика (или иначе кулачка), с увеличением температуры окружающей среды резко возрастает вероятность появление отказов, связанных с потерей арретирукнцей способности в 1ледствие заклинивания пары арретир-кулачок, либо вследствие выхода из строя обмотки электромагнита при попытках устранить заклинивание путем подачи управляющих импульсов повышенного напряжения. Для уменьшения указанных сил трения между арретиром и кулачком иногда. устанавливгиот вспомогательный ролик на подвижной несущей оси. Однако такое решение не является оптимальным, так как приводит к увеличению вероят ности самопроизвольного разарретиро вания измерительной системы при воздействии ударных нагрузок, имеющих место при спуске-подъеме и транспорт ровании инклинометра. Кроме того, конструкция известног инклинометра ограничивает его функциональные возможности по той причине, что он имеет небольшой, осуществ ляемый с помощью электромагнита цикл переключений. Увеличение числа позиций связано с необходимостью увеличения либо максимального, либо минимального радиус-вектора профиля кулачка. В перэом случае это приводит к увеличению поперечного габарита корпуса, а во втором - к недопустимому уменьшению хода арретирй, в результате чего инклинометр в малогабаритном варианте исполнения не может решать многофункциональные промлслово-геофизические задачи, например, путем использования в измерительной системе многообмоточных датчиков, либо подключения к контактной системе дополнительных датчиков при комплексировании инклинометра с другимми видами скважинной аппаратуры. Цель изобретения - повьш1ение надежности работы и обеспечение возможности измерений в сверхглубоких скважинах. Поставленная цель достигается тем, что в инклинометре, содержащем корпус, в котором размещен измерительный блок, связанный с подпружиненным арретиром, имеющим опорный элемент, соединенный через кинематическую связь с фиксирующим узлом, который соединен с коммутатором и штоком электромагнита, фиксирующий узел- выполнен в виде ролика с блокирующими элементами, а кинематическая связь выполнена в вцде двух стержней с насаженными на них упорами, причем стержни жестко закреплены на опорном эле менте, установленном с возможностью взаимодействия со штоком. Кроме того, коммутатор вьшолнен на магнитоуправляемых контактах. На фиг. t изображен один из вариантов исполнения инклинометра, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез В-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 1. Инклинометр содержит корпус 1, внутри которого размещен измерительный блок 2, включающий, по меньшей мере, датчик зенитного угла и датчик азимута (на чертеже не показаны). Измерительный блок 2 имеет возможность взаимодействия с подпружиненным с помощью пружин 3 и 4 арретиром 5, который служит для осуществления фиксации чувствительных элементов датчиков при измерении г1зимутальных и зе нитных углов скважин. Арретир 5 снабжен основной и дополнительной опорными частями, первая из которых выполнена в виде планки б, а вторая имеет вид периферийно закрепленных одними концами на планке 6 двух стержней 7 и 8 с упорами 9 и 10. Другие концы стержней 7 и 8 установлены для предотвращения последних от изгиба в направляющих отверстиях, предусмотренных в основании 11, жестко соединенн()м с корпусом 1. Упоры 9 и 10 разнесены относительно друг друга вдоль стержней 7 и 8 с возможностью взаимодействия с роликом 12, имеющим форму катушки, щеки которой несут диаметрально противоположно расположенные блокиру101цие элементы 13 и 14. В данном случае блокирующие элементы -13 и 14 имеют форму колец, жестко соединенных с роликом 12, и имеют разрыв (фиг,4) образукяций ответные пазы 15 и 16 под упоры 9 и 10. Блокирующие элементы в зависимости от реализуемых инклино метром функций могут иметь различную форму и конструкцию и предназначены для удержания арретира 5 в крайнем йижнем рабочем положении посредством одновременного взаимодействия через стержни 7 и 8 с упорами 9 и 10. Количество стержней и упоров выбрано из условия, необходимости устранения перекосов и заклиниваний арретира 5 и для данного инклинометра является оптимальным. При этом указанная форт ма выполнения ролика 12, несмотря на наличие двух диаметрально противоположно установленных упоров 9 и 10, позволяют сохранить нёизменшам максимально возможный цикл переключений, который был бы достигнут при использовании одного упора..Ролик 12 с возможностью дискретного вр|ащения установлен на несущей оси 17, консол но закрепленной на основании 11.Диск ретное вращение ролика 12 обеспечивается с помощью приводного храпового механизма,размещенного между роликом 12 и арретиром 5. Приводной храповый механизм включает в себя Г-образный рычаг 18, установленный с возможностью вращения на основании 19 и несущий на одном конце собачку 20, введенную в замыкание с храповым кол сом 21 пружиной 22, закрепленной на рычаге 18. Основание-19 имеет сложную форму и снабжено лыской на которой закреплена пружина 23, взаимодействующая с рычагом 18 и вводящая другой конец последнего в контакт с ограничительным винтом 24, установленным в хвостовике основания 19. Для устранения вращения храпового колеса 21 при обратном ходе собачки 20 оно снабжено пружинш 1м фиксатором 25, жестко закрепленным на выс тупе основания-26.Храповое колесо 21 кинематически связано с роликом 12 для, передачи ему ди(5кретного вращатель- ; / ного движения. При этом для уменьшения мертвого хода арретира 1, образуемого за счет обеспечения необходимости выхода упоров 9 и 10 (при перемещении вниз на фиг. 1).из ответных пазов ролика 12, кинематическая связь между последним и храповым колесом 21 выполнена в виде муфты упругого сцепления. Ведомая полумуфта 27 этой муфты выполнена с роликом 12 как одно целое и снабжено поводком 28. Ведущая полумуфта 29 посредством вала 30, установленного в центральном отверстии основания 26, жестко связана с храповым колесом 21 И снабжена поводком 31. Обе полумуфты связаны между собой упругим элементом, выполненным в виде спирально пружины 32. Причем, пружина 32 установлена таким образом и обладает такой жесткостью, что при вращении ведущей полумуфты 29 (по часовой стрелке при виде сверху на фиг. 1) и устранении факторов, мешающих вращению ролика 12, всегда обеспечивается контактирование между собой поводков 28 и 31. Для приведения в действие приводного храпового механизма он посредством щтока 33.кинематически связан с якорем электромагни- та (на чертеже не показаны). При этом шток 33 для улучЩения компактности конструкции размещен по оси симметрии корпуса 1, для чего несущая ось 17 ролика 12 и вал 30 выполнены полыми. Причем, нижняя часть штока 33 установлена вцентральном отверстии основания 19 с возможностью контактирования с планкой 6 арретира 5 и снабжена пальцем 34, имеющим возможность взаимодействия с, рычагрм 18. Для обеспечения свободного осевого перемещения штока 33 рычаг 18 может иметь специальное отверстие (как это показано на фиг.1) или более сложную конфигурацию. Кинематическая связь между штоком 33 и якорем электромагнита выполнена в виде подпружиненного с помощью пружины 35 толкателя 36, несущего совместно со штоком 33 ротор 37, снабженный преобразователем его возвратно-поступательного перемещения в шаговое вращательное и установленный с возмож-г ностью взаимодействия с системой контактов. При этом, для улучшения компактности конструкции преобразовател перемещения ротора 37 выполнен за од но с приводным храповым механизмом ролика 12, для чего ролик 12 снабже средством передачи вращательного дви жения ротору 37. Это средство может быть различным по конструкции. Так, в случае жесткого соединения встык между собой штока 33 и толкателя 36 и размещения на одном из них ротора 37 на шарикоподшипниках оно может быть выполнено в виде последовательно сое диненных между собой трехзвенного зу чатого механизма, и поводковой муфты. При- этом первое звено зубчатого механизма, например, цилиндрическое плоское зубчатое колесо должно быть установлено на фланце 38 ролика 12, третье звено (также цилиндрическое плоское зубчатое колесо) должно быть жестко соединено с ведущей полумуфтой упомянутой муфты, а второе (промежуточное) звено должно быть вьтолнено в виде меньшего по наружному диаметру и большего по высоте цилинд рического зубчатого колеса с осью вращения, установленной на верхней части основания 11 параллельно оси симметрии корпуса 1. Причем ведомая полумуфта упомянутой муфты должна быть жестко соединена с нижним торцом ротора 37 и иметь возможность возвратногпоступательного перемещения совместно с последним относитель но ведущей полумуфты, которая с возможностью врйщения должна быть закреплена на верхней части основания 1 Такое вьшоленение средства передачи вращательного движения от ролика 12 к ротору 37 хотя и несколько усложня ет конструкцию, однако может быть единственно приемлемым в случае необходимости получения максимального количества коммутируемых позиций, а также в случае циклического воздействия, на инклинометр больших динамических нагрузок, например, при прохождении в скважине над долотом в процессе разбуривания горных пород. Однако дпя прочих условий предпочтительным является выполнение указанного средства в виде магнитной системы из постоянных магнитов, сгруппи рованных на встречных поверхностях ролика 12 и ротора 37. При этом магнитная система включает в себя два закрепленных на роторе 37 постоянных магнита 39 и 40, оси намапШчивдния которых параллельны его образующим и направлены встречно с возможностью взаимодействия, по крайней мере, с одним установленным на фланце 38 постоянным магнитом 41, ось намагничивания которого перпендикулярна осям намагничивания магнитов 39 и 40, а их разноименные полюса направлены встречно друг другу. При этом основание 11 должно быть выполнено из немагнитного материала, например, латуни. Причем, для уменьшения углов рассогласования между ротором 37 и роликом 12, являнхцихся следствием возраста1ния при повышенных температу pax момента трогания и мертвого хода ротора 37, последний с помощью опор 42 и 43 установлен на кернах 44 и 45 внутри барабана, выполненного из-немагнитно го материала, например, латуни и соосно состыкованного с обеих сторон со штоком 33 и токателем 36. Для предотвращения самопроизвольного поворота в крайнем верхнем положении ротор 37 снабжен узлом стопорения, выполненным в виде стопорного диска 46, жестко присоединенного к корпусу 1, и признаматического звена, вьшолненного как одно целое с ротором 37, имеющим по этой причине возможность фиксации в пазах (фиг. 3), предусмотренных в теле стопорного диска 46. При этом барабан в зоне стопорения ротора 37 имеет окна (фиг. 2), перегородки 47 между которыми при помощи имеюпщхся в стопорном диске ответных прорезей образуют одноподвижную кинематическую поступательную пару. Это позволяет предотвратить вращение барабана и обеспечить фиксацию ротора 37. Для упрощения конструкции в случае ее работы в некомпенсированном охранном кожухе контактная система может быть выполнена в виде блока герконов 48 53 (4иг. 2). При работе конструкции в компенсированном охранном кожухе (что имеет очень важное значение для уменьшения поперечного габарита сквджинного прибора) контактная система должна быть выполнена из открытых контактов, либо должна включать в себя стойкие к скважинному давлению герконы специальной конструкции. Дпя повьшения быстродействия инклинометра путем ограничения чяспа регистрируемых параметров блокирующие элементы ролика 12 могут быть выполнены с возможностью перемещения в радиальных направлениях, например. в виде винтов или пальцев. Причем в зависимости, от конструктивных возможностей, определяемых прежде всего габаритами ролика 12, подвижные блокирующие элементы могут быть выполне ны с возможностью их извлечения и перестановки,- либо с возможностью утопления и фиксации в теле ролика 1 Для упрощения процесса регулировки осевого зазора ротора 37 керн 44 установлен на торце толкателя 36, об разующего с барабаном винтовую пару и снабженного винтовым фиксатором 54 При этом для упрощения конструкции керн 44 может быть выполнен как одно целое с толкателем 36. Для упрощения процесса установки ротора 7 внутрь барабана последний может быть выполнен в виде двух вставленных . один в другой и жестко соединенных между собой стаканов 55 и 56. Причем дпя повьппения эффективности работы магнитной системы путем обеспечения возможности взаимодействия магнитов 40 и 39 с магнитом 41 на минимал ном расстоянии друг от друга стаканы 55 и 56 выполнены охватьшающими верхнюю часть основания 11 и магнит Кроме того, для достижения этого стакан 56 должен быть выполнен как одно целое с штоком 33, например сварным. При этом для упрощения констрз ции керн 45 может быть установлен на торце штока 33 и выполнен с ним как одно целое. Инклинометр работает следующим образом. Примем за исходное то состояние инклинометра, которое изображено на чертеже. В этом состоянии измеритель ная система 2 разарретирована, а гер коны 48 и 51 с помощью магнитов 39 и 40 замыкают индикаторную электриче кую цепь, в которой в качестве индикаторного элемента может быть использована одна из-обмоток датчиков. При подаче управляющего импульса напряжения на обмотку электромагнита якорь последнего, сжимая пружину 35 перемещает толкатель 36 в направлени указанном на чертеже стрелкой. При этом барабан, скользя своими перего родками 47 в прорезях стопорнаго диска 46, совмёстйо с ротором 37 пе ремещается вниз до сохранения минимально возможного зазора между дном стакана 56 и поверхностью верхней части основания 11. Обеспечение упо мянутого зазора необходимо для устранения ударных нагрузок и повреждений в связи с этим тонкостенных элементов деталей. В начальный период осевого перемещения ротор 37 выходит из пазов стопорного диска 46/ и приобретает возможность совершения вращательного движения. При этом герконы 48 и 51, с которыми взаимодействовали магниты 39 и 40, размыкаются, предохраняя таким образом, датчики измерительной системы 2 от перенапряжения. Шток 33, перемещаясь совместно с толкателем 36 и барабаном с роторбм 37, своим нижним концом, воздействуя на планку 6, перемещает вниз арретир 5, сжимая пружины 3 и 4. Перемещаемые совместно с арретиром 5 стержни 7 и 8 вводят упоры 9 и 10 в пазы 15 и 16 ролика 12. После этого палец 34 входит в контакт с плечом рычага 18, вьшодя его из соприкосновения ограничительным винтом 24 и поворачивая на некоторый угол вокруг собственной оси. При этом собачка 20 начинает вращать, храповое колесо 21 совместно с ведущей полумуфтой 29. Ведущая полумуфта 29 вращается одна без ведомой муфты 27 до тех пор, пока упоры 9 и 10, перемещаясь в свое крайнее нижнее положение, не вьйдут из пазов 15 и 16 ролика 12. При этом пружина 32 сжимается, а поводок 31, выйдя из соприкосновения с поводком 28, перемещается совместно с ведущей полумуфтой 29. После выхода упоров 9 и 10 из пазов 15 и 16 собачка прекращает угловое перемещение храпового колеса 21 вследствие достижения, например, якорем электромагнита своего стопа. При этом завершается процесс арретирования датчиков измерительной системы. Вследствие освобождения ролика 12 от ранее удерживающих его упоров 9 и 10 он совместно с ведомой полумуфтой 27 под действиём-разжимающейся пружины 32 начинает совершать ускоренное вращательное движение до тех пор, пока поводок 28 не войдет в соприкосновение с по водком 31. При этом магнит 41, взаимодействуя с магнитами 39 и 40, осуществляет поворот ротора 37 на угол, соответствующий его новой позиции .и равный углу поворота ролика 12. Причем пазы 15 и 16 ролика 12 также занимают новую позицию, сместившись вправо (при виде сверху на фиг. 1) . от плоскости перемещения упоров 9
« 10, проходящей через оси стержней 7 и 8. После обесточивания обмотки электромагнита толкатель 36, барабан с ротором 37 к шток 33 под Действием пружины 35, а также ры- , j чаг Т8 и собачка 20 под действием прзгжин 23 22 занимают исходное положение. При этом ротор 37 входит в пазы стопорного диска 46, соответствукяще его новой позиции, и замы- ю кает при этом с помощью магнитов 39 и 40 герконы 49 и 52 следующей элект-. рической цепи, например, датчика зенитного угла. Причем, шток 33, перемещаясь вверх, выходит из соприкосно-J5 вения с планкой 6 при вхождении упоров 9 и 10 в контакт с блокирумщими элементами 13 и 14 ролика 12, в результате чего арретир 5 остается в крайнем нижнем рабочем положении, JQ незначительно переместившись вверх на величину его мертвого хода, соответствующего зазору (примерно 0,10,5 мм), который имел место между нижними сторонами блокирующих эле- 25 ентов 13 и 14 и верхними сторонами упоров 9 и 10.,
При подаче на обмотку электромагниа второго управляющего импульса напряжения процесс перемещения большин-30 ства элементов конструкции не изменяется за исключением того, что ролик 12, находящийся посредством блокирующих элементов 13 и 14 в контакте с упорами 9 и 10, может проскаль- 35 зывать относительно последних на угол поворота, зависящий от шероховатостей контактирующих поверхностей и от жесткости пружины 32. При вхождении нижнего конца штока 33 в сопри- 40 косновение с пл&нкой 6 и во время выбирания мертвого хода арретира 5 ролик 12, освободившись от взаимодействия с упорами 9 и 10, занимает новую позицию, которую благодаря 45 взаимодействию магнитов 39 и 40 с магнитом 41 практически одновременно занимает и ротор 37. При этом пазы 15 и 16 ролика 12 не достигают плоскости перемещения упоров 9 и 10, 50 в результате чего после обесточивания обмотки электромагнита ротор 37 входит в пазы стопорного диска 46, соответствующие новой его позиции и с помощью постоянных магнитов 39 55 и 40 замыкаеФ герконы 50 и 53 еледующей электрической цепи, например, датчика asimyra.
При подаче на обмотку электромагнита третьего управляющего импульса напряжения процесс перемещения элементов конструкции идентичный тому, который происходил при втором управлякнцем импульсе. Однако в этом случае пазы 15 и 16 ролика 12 и магни-. ты 39 и 40 ротора 37 устанавливают в плоскости перемещения упоров 9 и 10, в результате чего после обесточивания обмотки электромагнита упоры 9 и 10, пройдя вверх через пазы 15 и 16 ролика 12, обеспечивают перемещение арретира 5 в исходное верхнее положение под действием пружин 3 и 4. В процессе перемещения арретира 5 его планка 6 находится в неразрывном контакте с нижним концом штока 33. Ротор 37, завершивший таким образом поворот на 180, входит в пазы стопорного диска 46,соответствующие его исходной позиции и с помощью магнитов 39 и 40 замыкает герконы 48 и 51 исходной индикатррной электрической цепи. В этой позиции датчики изме1Я1тельной системы 2, освобождаясь от воздействия арретира 5, приобретают способность самоориентации и измерения азимутального и зенитного углов скважины. В случае использования инклинометра в условиях, исключакщих возможность измерения азимута, датчик пocлeднeгq может быть временно выключен из . Для этого блокирующие элементы ролика 12 должны быть вылонены например, в виде винтов. Варьируя перестановокй, либо утоплением в теле ролика 12 упомянутых винтов, можно добиться осуществления разарретировани измерительной системы 2, в позиции при замыкании герконов 50 и 53 и арретирования системы 2 замыканием . герконов 48 и 51.
Такое выполнение инклинометра позволяет повысить его быстродействие за счет возможности исключения из числа регистрируемых параметров такого параметра, который не является необходимым для определенных условий эксппуатации (азимута - при работе инклинометра в обсадной колонне, в стальных бурильных трубах, на железорудных месторождениях и ап идального угла при работе инклинометра в открытом стволе скважины, при отсутствии магнитных аномалий).
В связи с обеспечением возможности непосредстаенного воздействия на арретир 5 штока 33 и подключением к последнему вспомогательных кинематических цепей параллельно, а не пос ледовательно, как это имеет место в известных инклинометрах, режим работы звеньев предложенного инклинометра в целом становится легче за 1 14 счет исключения источников больших сил трения. Кроме того, расширяются функциональные возможности инклинометра и обеспечивается возможность более рационального его использования в зависимости от условий эксплуатации.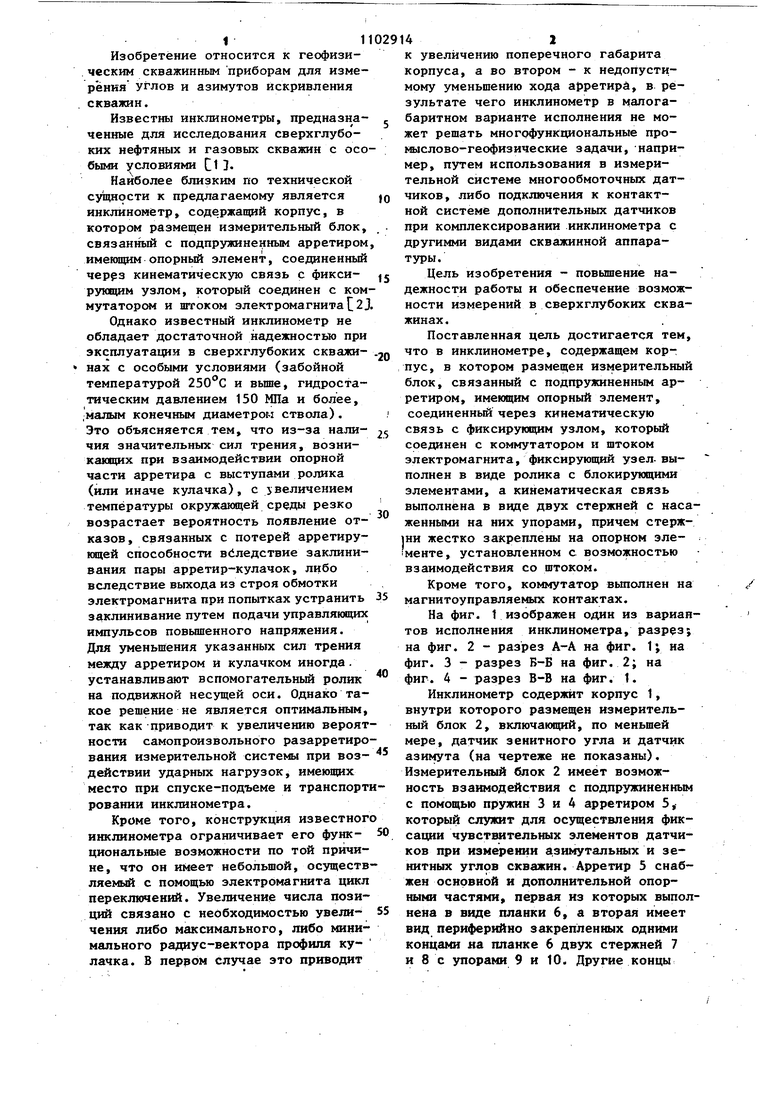


| название | год | авторы | номер документа |
|---|---|---|---|
| Инклинометр | 1982 |
|
SU1089247A1 |
| Инклинометр | 1990 |
|
SU1723317A1 |
| Инклинометр | 1983 |
|
SU1145124A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2131028C1 |
| Инклинометр | 1974 |
|
SU682640A1 |
| Устройство для контроля и сортировки магнитов | 1987 |
|
SU1443979A1 |
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |
| Аппарат для автоматического взвешивания,дозирования и упаковки штучных пищевых продуктов | 1972 |
|
SU518637A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| ИНКЛИНОМЕТР для ИССЛЕДОВАНИЯ СВЕРХГЛУБОКИХ^'-•.::v'-'!pi.'*/СКВАЖИНI b-.5Ai,ri::;A | 1965 |
|
SU173154A1 |

1. ИНКЛИНОМЕТР, содержащий корпус, в котором размещен измерительный блок, связанный с подпружиненным арретиром, имеющим опорный элемент , соединенный через кинематическую связь с фиксирующим узлом, который соединен с коммутатором и штоком электромагнита, отличающийс я тем, что, с цельй повышения надежности и обеспечения возможности измерений в сверхглубоких скважинах, фиксирующий узел выполнен в виде ролика с блокируннцими элементами, а кинематическая связь выполнена в виде двух стержней с насаженными на них упорами, причем стержни жестко закреплены на опорном элементе, установленном с возможностью взаимодействия со штоком. 2. Инклинометр по п. 1, о т л иО) чающийся тем, что коммутатор выполнен на магнитоуправляемых контактах .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зельцман П.А | |||
| Конструирование аппаратуры для геофизических исследований скважин | |||
| М., Недра, 1968, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Инклинометр | 1974 |
|
SU682640A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
