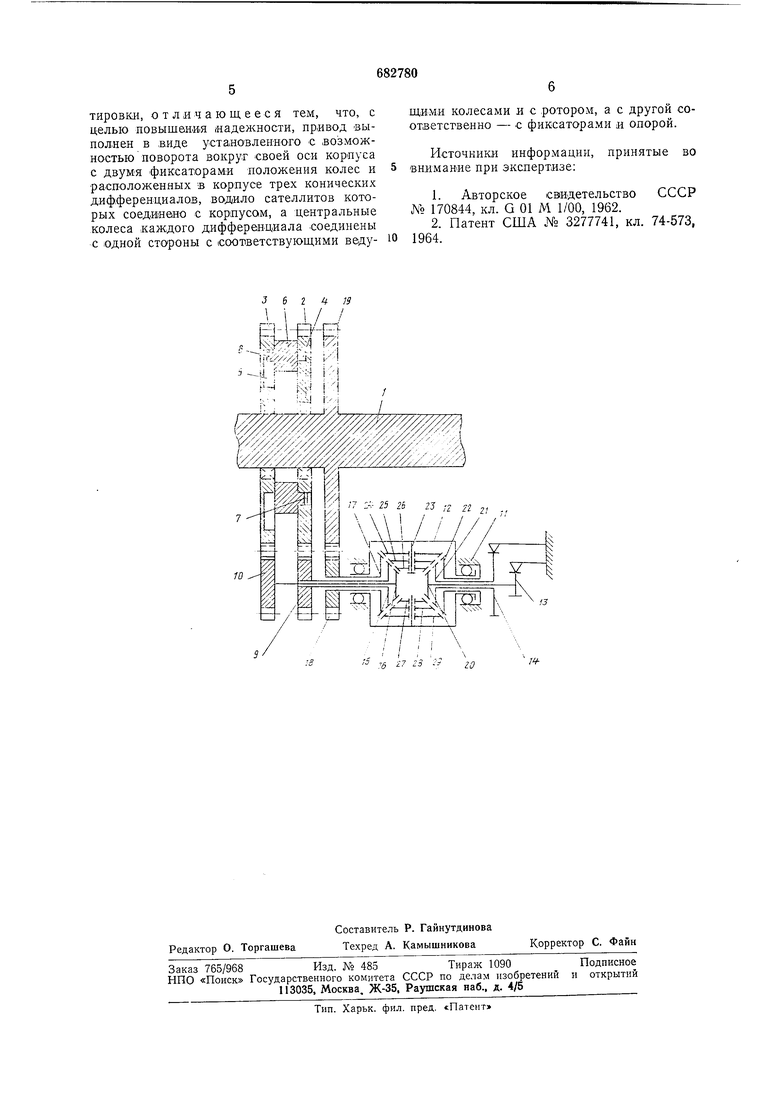
Устройство для балансировки ротора содержит механизм .корректировки, выполненный в виде двух установленных соосно с pOTOpOiM 1 с возможностью поворота вокруг своей оси Ведомых зубчатых колес 2 и 3, одно из которых 2 имеет радиальный паз 4, а другое 3 - спиральный паз 5, размещенного между .колесами кольцевого балансировочного груза 6 с выступами 7 л S на торцах, .взаимодействующим. с радиальным назом 4 .и сниральным .пазом 5, двух ведущих зубчатых колес 9 и 10, взаимодействующих с колесам.и 2 и 3. Устройство содержит также привод механизма корректировки, который выполнен .в вй-ие корпуса //, установленного в основан.ни 12 -с возможностью поворота Бокруг своей оси с двумя фиксаторами 13 и М положения колес 2, 3 и .расположенных в корпусе трех конических дифференциалов. Центральные колеса 15, 16, 17 каждого дифференциала соединены с одной стороны с -соответствующими, водущ.ими колесам.и 9, 10 и с зубчатым колесом 18, соеди.ненным с .колесом 19 ротора 1. С другой стороны центральные колеса 20, 21 и 22 каждого дифференциала соединены соот.ветст1венно с фиксаторами 13, 14 .и основанием 12. Водило 23 сателлитов 24-29 жестко соединено с корпусо-м 11. Устройство работает следующим образом. Если дисбаланс ротора в рассматриваемой нлоскости его коррекции не превышает своего допустимого значения, то отна.дает необходимость в комненсационном воздействии балансировочного груза. Это достигаемся за счет того, что центральные колеса 15, 16, 20 и 21 двух дифференциалов и .их .сателлиты 25-28, для которых справедливо равенство со2 «)з i:) (i j 0)3, COS и cojg - угловые скорости вращения соответственно ротора 1, колес 2 и 3, груза 6 и колеса 19}, .фиксирОВаны в своих положени.ях фиксаторами 13 и 14. Принято, что z. ,j 29 i;jo 2,е; , Z||j-221)1 - 222 (.22, 2.,, 2cj, 2jQ, 2.-,, 2iG 2Г|„ 2jf,, 2|,, 2.Q, 2.Д, 233 - ЧИСЛО ЗубьеВ колес соответственно 2, 5, 9, 10, 15, 16, 17, .18, 19, 20, 21 и 22}. Баланоировочный груз 6 вращается с угловой скоростью, рав.ной угловой скорости вращения ротора, поэтому не вносит корректирующего воздействия в до.нуст И1Мое .значение дисбаланса ротора. Если же дисбаланс ротора в рассматриваемой плоскости его коррекции превышает свое допустимое .значение, то необходимо произвести его корректировку. Для этого с помощью ф.иксаторов 13 и 14 центральных колес 20 .и 21 освобол{даются от фиксации и поворачивают одновремен.но на углы, достаточные для аппара)тур.ной оценки изменений уровней в.ибраций, например, колебаний опор роторной оистемы. В том случае, если эти уровни уменьш аются, то поворот достижения .минимального уровня вибраций, в нротивном случае изменяется направление поворота колес 20 и 21 на обратное, .при этом справедливы равенства U)),K № l8-l- 20. где 0)20 -«21. 3 , «16. 17. - угловые скорости вращения соответственно зубчатых колес 9, 10, 16, 17, 18, 20, 21. Следовательно, зубчатые колеса 2 и 5, а вместе с ними балансировочный -груз 6 в своем относительном дв.ижении к ротору опережают его или же отстают от него. По достижении минимальных уровней вибраций одно из колес 20 или 21 с по(Мощью управляемого фиксатора 13 фиксируется в определенном положении, а второе колесо остается освобожденным. Для этого случая справедливы равенства + 2i; U).; tO,,,; + 19± Вращение колеса 21, освобожденного фиксатором 14, приводит .к перемещению балансировочного груза 6 в радиальном направлении. Поворачивая колесо в одном или другом на.цравлениях, по изменениям уровней вибрации определяется направление минимизации дисбаланса ротора. Колесо поворачивается до тех по.р, пока не будет достигнут минимальный уровень вибр.аций, пропорциональный допустимым значениям дисбалансов ротора. После этого с помощью фиксатора 14 колесо фиксируется в определенном направлении и при этом справедливо равенство Ш,и).Ш,,,. Предлагаемое устройство позволяет производить балансиров.ку роторов с высокой точностью, обеспечивая повышенную надежность его работы. Формула изобретения Устройство для балансировки роторов, содержащее механиЗ(М корректировки, выполненный в в.иде двух устанавливаемых соосно с ротором с возможностью поворота вокруг своей оои ведомых зубчатых колес, одно из которых имеет радиальный паз, а .другое - спиральный паз, размещенного между колесами кольцевого балансировочного груза с выступами на торцах, взаимодействующим с пазами, двух ведущих зубч.атых колес, взаимодействующих с ведомытировки, отличающееся тем, что, с целью повышения (надежности, привод выполнен в виде установленного с возможностью поворота вокруг своей оси корпуса с двумЯ фиксаторами положения колес и расположенных в корпусе трех конических дифференциалов, водило сателлитов которых соединено с корпусом, а центральные колеса каждого дифференциала .соединены с одной стороны с соответствующими ведущими колесами и с ротором, а с другой соответсгвенно - с фиксаторами и опорой.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 170844, кл. G 01 М 1/00, 1962.
2.Патент США № 3277741, кл. 74-573, 1964.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гашения вибраций роторных машин | 1979 |
|
SU887831A1 |
| УГЛОВАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2009 |
|
RU2424446C2 |
| РАЗДАТОЧНАЯ КОРОБКА ТРАНСПОРТНОГО СРЕДСТВА С МЕХАНИЗМОМ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2011 |
|
RU2462372C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2033542C1 |
| МОСТ С ЦИЛИНДРИЧЕСКОЙ ГЛАВНОЙ ПЕРЕДАЧЕЙ В ХОДОВОЙ ЧАСТИ | 2023 |
|
RU2811589C1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ К АВТОТРАНСПОРТНОМУ СРЕДСТВУ | 2015 |
|
RU2611290C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2168032C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА И СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2075737C1 |
| Бурильная машина | 2002 |
|
RU2224076C1 |
| НЕСИММЕТРИЧНЫЙ ДИФФЕРЕНЦИАЛ | 1992 |
|
RU2057268C1 |
J 6 2 /у
14го
