1
Изобретение относится к области автоматического управления и может быть использовано при создании цискретных систем шагового электропривода,
Известна система позиционного управления, содержащая генератор тактовых импульсов, распределитель, усилитель, шаговый двигатель и вычитающий счетчик fl.
Известная система имеет низкие точность и быстродействие.
Наиболее близким техническим решением к данному изобретению является система позиционного управления, содержащая генератор тактовых импульсов, подключенный к коммутатору, и последовательно соединенные усилитель мощности, шаговый двигатель, датчик шагов и вычитающий счетчик, выходы которого подключены к соответствующим входам коммутатора 2.
Недостатком этой системы является ограниченность быстродействия и точности позиционирования. В ней отработка зацанной программы поз щионировання осуществляется с постоянной скоростью и неизменной величиной eniiHH4i OPO шага шагового двигателя.
Целью изобретения является повышение точности и быстродействия CHcreNibi,
Сущность изобретения заключается в том, что система содержит распределитель импульсов и анализатор кода позиционирования, входы которого соединены с соответствующими выходами вычитающего счетчика, а выходы - с .соответствующими входами распределителя импульсов, один из вхоцов которого подключен к коммутатору, а выход - к входу усилителя мощности.
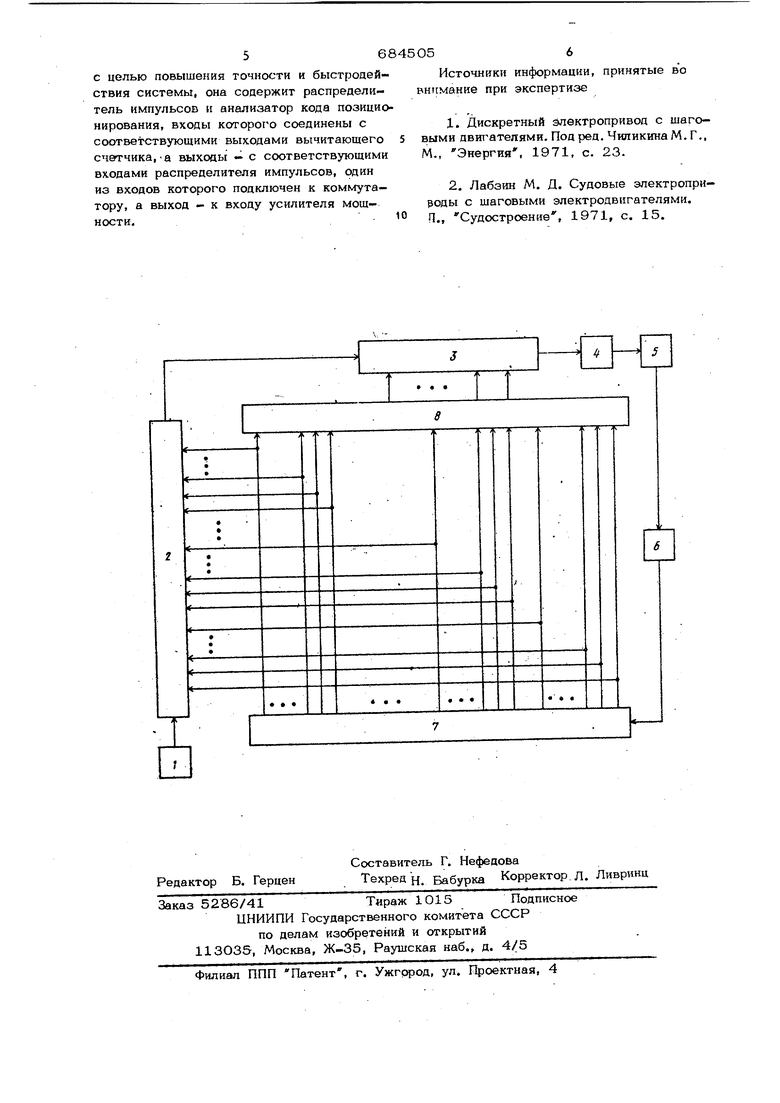
На чертеже преаставлена блок-сх. системы позиционного управления.
Система содержит генератор 1 тактовых импульсов, коммутатор 2, распределитель 3 импульсов, усилитель 4 мощности, шаговый двигатель 5, датчик 6 шагов, вычитающий счетчик 7, анализатор 8 кода позиционирования. Система работает следующим образом. Распределитель 3 импульсов создает гп фазную систему прямоугольных им пульсов напряжения, которая через усилитель 4 мощности подается на фаз. ный шагсжый двигатель 5. Для анализа кода позиционирования разряды вычитающего счетчика 7 расчле йяются на.та -1 разряаовых пакетов. По мере отработки кода поочередно обнуляются старшие разрядовые пакеты вычитаю шего счетчика 7, что приводит к соответствующему изменению кодовой комбинации на выходах анализатора 8 кода позиционирования. Изменение кодовых комбинаций на уй равляющих шинах распределителя 3 поЗ воляет создать до ГП - 1 режимов коммутации фаз, что соответственно приводит к постепенному уменьшению величины единичного шага шагового двигателя от fffv-1)c(.-ДОсСз минимальный электрический шаг двигателя, получаемый при с(Х)тветствующей коммутации ( где о... - мёханический yrw, р - чгвдлр пар полюсов, S число заходов коммутации, Т тактность комм5таций). Величина чувствительности датчика 6 шагов выбирается равной минимальному возможному шагуЬ. Число импульсов, поступаемых от датчика 6 шагов на вход вычитающего счетчика 7, определяется величиной шага ротора, то есть режимом коммутаций распределителя 3 импульсов. В исходном состоянии системы вычитающий счетчик 7 находится в нулевом состоянии, при котором закрыт коммута. тор 2, представляющий собой логический элемент И, и импульсы от генератора 1 тактовых импульсов не поступают в распределитель 3. При записи в вычитаю щий счетчик 7 кода позиционирования от крывается коммутатор 2 и импульсы от генератора 1 тактовых импульсов посту« пают в распределитель 3, Вместе с тем, потенциалы с разрядов вычитающего счет чика 7 поступак)Т i на входы анализатора 8 кода позиционирования, что приводит к возникновению на его выходах определенного кода. Этот код поступает на управляющие шины распределителя 3 и обе печивает в нем соответствующий режим коммутации фаз шагового двигателя 5, Если записанный в вычитающий счет- чик 7 код позиционирования заполняет .все - его разрядовые пакеты, то на выхо- I дах кода позиционирования анализатора 8 возникает коц, обеспечивающий с помощью оответствующего режима распределителя 3 максимальную величину единичного шага отработки шагового двигателя 5(т-1)Лз При этом происходит быстрая отработка кода, так как при фиксированной частоте генератора 1 тактовых импульсов на каждый тактовый импульс ротор поворачивается на угол frtj-ljrfj и с датчика 6 шагов на вход вычитающего счетчика 7 поступает (пг-4) имп5ЩьсоБ, При отработке кода в вычитающем счетчике 7 сперва обнуляется высший разрядовый пакет, что приводит к снижению величины шага, и последующая отработка программы до обнуления следующего разрядового пакета происходит с углом{гп-2)АзС приближением к точке позиционирования поочередно обнуляются все разря- довые пакеты. При обнулении всех разрядовых пакетов, кроме последнего младшего разрядового пакета, на входы распределителя 3 от анализатора 8 кода позиционирования поступает кодовая комби- нация, обеспечивающая наименьшую величину единичных шагов отработки шагового двигателя 5. После псиной отработки записанного кода коммутатор 2 закрывается, импульсы от генератора 1 тактовых импульсов не поступают на распределитель 3 и ротор шагового двигателя 5 фиксируется в требуемой точке позиционирования. Таким образом, начальное движение шагового двигателя 5 совершается боль- щими шагами и тем самым процесс от- работки ускоряется. С приближением к точке позиционирования скорость отработки шагов снижается, а едини.чный шаг уменьшается до величины OL, что позволяет повысить точность позиционирования. Применение изобретения позволяет осуществить отработку заданной программы с изменяющейся скоростью н точностью в зависимости of кода вычитающего счетчика, изменяемого в процессе отработки. Формула изобретения Система позиционного управления, содержащая генератор тактовых импульсов, подключенный к коммутатору, и последовательно соединенные усилите/1Ь мощност шаговый двигатель, датчик шагов и вычитающий счетчик, выходы которого подключены к соответствующим входам коммутатора, отличающаяся тем, что.
с целью повышения точности и быстродействия системы, она содержит распределитель импульсов и анализатор кода позиционирования, входы которого соединены с соответствующими выходами вычитающего счетчика,а выходы - с соответствующими входами распределителя импульсов, один из входов которого подключен к коммутатору, а выход - к входу усилителя мощности..
Источники информации, принятые во внимание при экспертизе
1.Дискретный электропривод с шаговыми двигателями. Под ред. Чиликина М. Г., М., Энергия, 1971, с. 23.
2.Лабзин М. Д. Судовые электропри- роды с шаговыми электродвигателями. П., Судостроение, 1971, с, 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| Коммутатор для управления шаговым двигателем | 1988 |
|
SU1566327A1 |
| Коммутатор для управления шаговым двигателем | 1987 |
|
SU1471175A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1982 |
|
SU1061230A1 |
| Устройство для управления п-ступенчатым дифференциальным шаговым двигателем | 1973 |
|
SU452906A1 |
| Устройство для позиционного управления шаговым двигателем | 1979 |
|
SU924816A1 |
| Следящая система | 1975 |
|
SU547726A1 |
| Устройство для позиционирования | 1980 |
|
SU932462A1 |
| Коммутатор для управления шаговым двигателем | 1990 |
|
SU1709271A2 |
| Устройство для многорежимного управления трехфазным шаговым двигателем | 1981 |
|
SU1001423A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1981 |
|
SU964951A1 |
