(54) УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1988 |
|
SU1647516A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Устройство слежения за дорожкой дискового носителя информации | 1987 |
|
SU1614031A1 |
| Устройство для считывания изображений | 1983 |
|
SU1104554A1 |
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| Шаговая система программного управления манипулятором | 1978 |
|
SU746433A1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1686691A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
1
Изобретение огносигся к технике подучения прецизионных перемещений обьекгов, применяемых во многих отраслях техники и, в частности, в манипуляторах и Коорцинатных столах, преимущественно с шаговым электроприводом и кинематической парой винт-гайка.
Известно устройство позиционирования с Компенсацией люфта, включающее шаговый электропривоо, сервосистему, датчик угла поворота, датчик перемещения и устройство коррекции l.
Однако такое устройство сложно при реализации, поскольку требует наличия обратной связи и чувствительных элементов сложной конструкции.
Наиболее близким техническим решением к предлагаемому является устройство позиционирования, включающее генератор импульсов, подключенный через коммутатор к шаговому двигателю, связанному с исполнительным механизмом, блок ввода, соединенный с коммутатором и первым входом счетчика шагов, второй вход и выХОД которого подключен к коммутатору, блок выборки люфта и блок памяти люфта 2.
Данное устройство позволяет в случае реверса движения скомпенсировать люфт кинематической пары на величину, записанную в блоке памяти люфта и обычно устанавливаемую равной его среднему значению. Однако вследствие неравномерного распределения величины люфта по дшгае
10 винта такое устройство не позволяет обеспечить достаточной точности- позиционирования. Кроме того, погрешность при позиционировании возникает за счетупругих деформаций привода.
ts
Цель изобретения- повышение точности устройства.
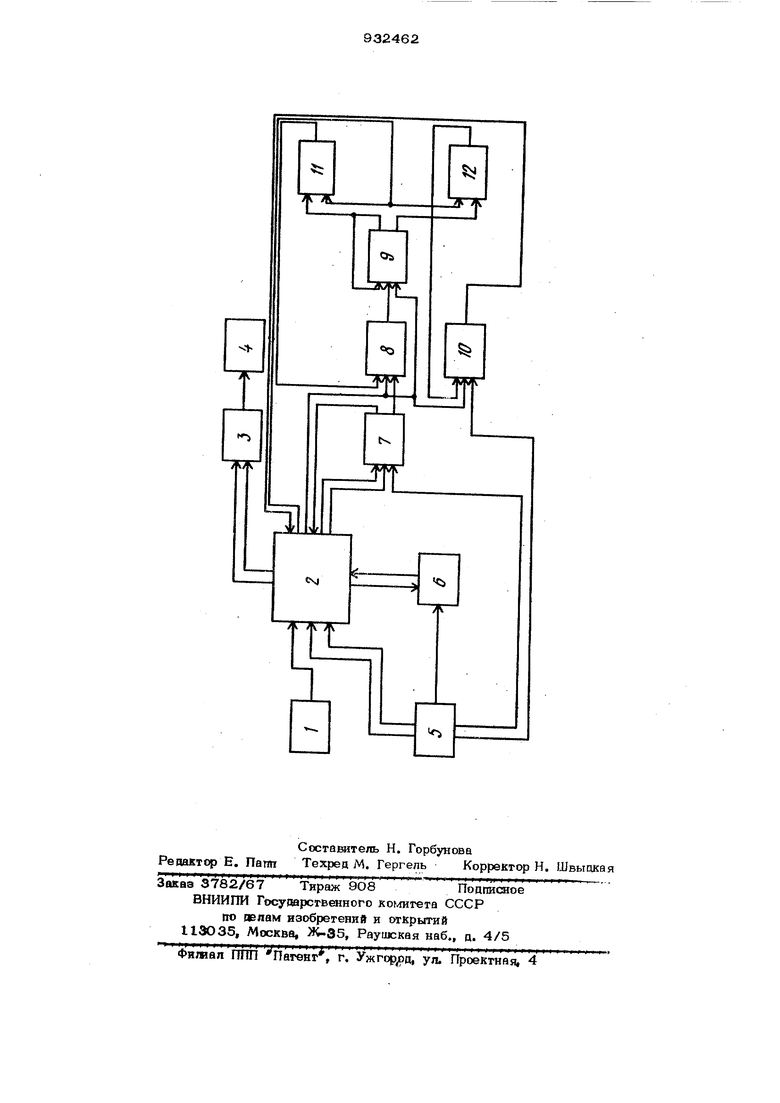
Поставленная цель достигается тем, что в устройство для поз1щионирования, содержащее генератор импульсов, поцкгоо20ченный через коммутатор ко входам шагового двигателя, соединенного выходом с входом исполнительного механизма, блок ввода, подключенный первым выходок-г вгорыми BbBtooaNra к вторым ахойам ком« мутатора, соединенного третьим входом с выходом счетчика шагов, а вторым вы ходом со считывающим входом счетчика, введены три счетчика, триггер к два элемента И-НЕ, соеоиненных первыми входами .с третьим выходом KoMMyiaTopa, ггодключеиного четвертыми входами к парвым входам первого счетчика, соединенно го информЕщионным входом с третьим ВЫ ходом блока ввода, первым выходом с четвертым входом коммутатора, а вторым выходом с информационным входом второго счетчика, подключенного вычитающим входом к выходу первого элемента И-HEj а утфавл.яютшм входом к пятому выходу коммутатора, к первому входу триггера и к управЛ5псвцему входу третьего счетчика, поаключе1шого информационным входом к четвертому выходу блока ввооа, вычитающим входом к выходу второго элемента И-НЕ, соединенного вторым входом с первым выходом триггера, связанного вторым входом и вторым выходом с вторым входом первого элемента И-НЕ, а третьим входом с высходом второго счетчика, причем выход третьего счетчика связан с пятым входом Коммутатора. На чертеже преоставлена блок-схема устройства, которое содеркиг генератор 1 импульсов, ко 1гмугатор 2, шаговый цвИ га те ль 3, исполнительный чехвгдазм 4 блж 5 ввода, счетшк 6 шпга.ч. счетчик 7, второй счетчик 8, тдаггои 9; третий счетчик 10, первый зж мент- И-НЕ 11, второй элемент И-НЕ 12, Устройство работает следующим обра зом. С блока 5 ввода на счетчик 6 шагов поступает сигнал, соответствующий требуемой величине перемещения. Происходит его запись. Затем с блока 5 ввода на ком мутатор 2 подается сигнал выбора на правления, рсуществлякядий разрещение прохождения импульсов с генератора 1 на шаговый двигатель 3 и опновременно на считывающий вход счетчика 6 шагов. Про исходит отработка заданного числа HMity льсов и перемещение испо;шительного механизма 4 на требуемое расстояние з заданном нааравдении. Перемещение но- по;вштельного механизма 4 ос тцествляется до тех пор, пока не обнуляется счетчик 6 шагов и с его выхода не поступает сигаал окончания цикла перемещения на коммутатор 2. Этот сигнал запрещает ттодачу импульсов с генераторе I
импульсы и считывается записанное в счетчик 10 число. Затем на выходе счетчика 10 появл51ется импульс, поступаюшагов. . После отработки заданного числа шагов двигателем 3 исполнительный механизм 4 должен переместиться в заданную точку позиционирования. Однако вследствие наличия люфтов и упругих деформаций в кинем а щ ческой цепи исполнительного механизма 4 точность его установки невелика. Поэтому далее начинается цикл выборки люфта и упругих деформаиий. ° приходу сигнала со счетчика 6 ; шагов -коммутатор 2 выдает сигнал на вход записи первого счетчика 7 и вызывает запись сигнала, поступающего с блока 5 ввода на информационный вход счетчика 7. Затем на выходе коммутатора 2 формируется импульс, поступающий на входы записи счетчиков 8 и 1О и на первый вход триггера 9. В результате код первсн. го счетчика 7 переписывается в счетчик 8, а в счетчик 10 записывается коо, поступаюБоий с блока 5 ввода. Записьюаемый в третий счетчик 1О Код соответствует перемещению исполнительного механизма 4 на величину , а записываемый в первый счетчик 7 код соответствует перемещению на величину „ ЬЙЛ , где Ь „ - максимально возможный люфт в кинематической цепи Ь - минимально возможный люфг, Оцновременно выставляется разр&шзклций гготен11иал на втором выходе триггера В, который соединен с его вторым входом и вторым входом эпемента 11. На первом выходе триггера 9s кото рый с оэ синен с входом элемента И-НЕ 12J выставляется запрещающий сигналов коммутаторе 2 снимается запрет на про- хож{гэние импульсов с генератора 1 из шаговый двигатель 3. Кроме того, импу™ льсы с генаратора 1 поступают на входы элементов 11 и 12.. На выхода элемента 11 появляются импульсы, поступающие на вычитающий вход второго счетчика 8. После того, как с второго счетчика 8 считывается записанное туда число, с его выхода поступает сигнал на третий вход триггера 9, который изменяет его состояние. На первом выходе триггера 9 и ла .входе элемента И-НЕ 12 появляется разрешающей сигнал, а на втором выходе и входе элемента 11 - запретный. С вь хода элемента 12 на вычитающий вход третьего счетчика 10 начинают поступать 593 щий на коммутаторе 2. При этом OHiraтепь Зсрабатывает заданное счетчиками 10 и 7 число импульсов и гфаясховдт перемещение исполнительного механизма вперед. После прихода импульса с выхода третьего счетчика 10 с выхода коммутатора 2 на входы записи счетчиков 6 и 10 поступает импульс. При этом повторно содержимое первого счетчика 7 запись вается во второй счетчик 8, в третий счетчик 10 записывается информация, поступающая с блока 5 ввода, а триггер 9 устанавливается в исходное состояние.Импульсы с генератфа I подаются на шаговы двигатель 3 с другого выхода коммутатора 2, что вызывает реверс двигателя 3. С выхода элемента 11 на вычитающий вход второго счетчика 8 начинают поступать импульсы. Происходит считывание содержимого счетчиков 8 и Ю, что приводит к перемещению исполнительного механизма 3 на ту же величину в обратном направлении. Когда счетчики 8 и 10 о&-нуляются, с выхода счетчика 10 на коммутатор 2 поступает второй импульс, который снова вызывает перезапись инфоримации из первого счетчика 7 во второй счетчик 8, запись информации в третий счетчик 1О, установку триггера 9 в исходное состояние, и цикл повторяется. В этом случае происходит перемещение исполнительного механизма на ту же величину, но без изменения направления движения. Когда с выхода третьего счетчика Ю на коммутатор 2 поступает третий импульс, цикл снова повторяется но в этом случае происходит реверс движения. По приходу с выхода третьего счетчика. 1О четвертого импульса на выходе коммутатора формируется импульс, который поступает на считывающий вход первого 7, с которого считывается единица. Затем в коммутаторе 2 формируется импульс и происходит перезапись новой информации со счетчика 7 в счетчик 8, запись в счетчик 10, установка триггера 9 в исходное состо5Шие. Далее весь цикл работы повторяется, но величина перемещения уменьшаетмя на одит шаг. Циклы работы устройства повторяются до тех пор, пока не считывается вся информация с первого 50
счетчика 7. Когда счетчик 7 обнулен, на его выходе формируется сигнал, поступающий на коммутатор 2. При приходе этого сигнала осуществляется запрет подачи импульсов на шаговый двигатель 3. Та- .КИМ образом обеспеч шается возвратнопоступательное цвижеНие исполнительного механизма 4 в направлении перемещения
счетчика .связан с пятым входом коммутатора.
Источники информ.ации, принятые во внимание npi;i экспертизе
