(54) УСТРОЙСТВО ДЛЯ ПОЗИ11ИОННСГО УПРАВЛЕНИЯ
t
Изобретение относится к области электротехники, а именно к управлению шаговыми двигателями и может быть использовано, например, в электроприводах механизмов прокатных станов с позиционным управлением.
Известно устройство для управления шаговым двигателем, содержащее коммутатор фаз шагового двигателя, импульсный датчик положения, установленный на валу двигателя, выполненный с числом импульсов на оборот, равным числу шагов двигателя, генератор импульсов управления, счетчик и блок сравнения l.
Наиболее близким к предлагаемому по технической сущности является усгройство для позиционного управления шаговым двигателем, содержащее установленный на валу двигателя импульсный датчик, блок цифрового задания величины перемещения, реверсивный и нереверсивный счетчики импульсов, блок сравнения, генератор управляющих импульсов, связанный через элемент И и узел разре- ШАГОВЫМ ДВИГАТЕЛЕМ
шения с входом коммутатора фаз шагового двигателя .j
Недостатком устройства $тляется низкая надежность и быстродействие при переменной нагрузке на валу двигателя, что обусловлено контролем отработки только целого шага, не псхзволяющим изменять режим коммутации двигателя при пуске с изменякяцимся моментом нагрузки.
to
Цель изобретения - повышение надеж ности и быстродействия при переменной нагрузке на валу двигателя.
Поставленная цель достигается тем, что в устройстве, содержащем установ15ленный на валу двигателя импульсный датчик, блок цифрового задания величины перемещения, реверсивный и нереверсивный счетчики импульсов, блок сравнения, генератор управл5поших импульсов,
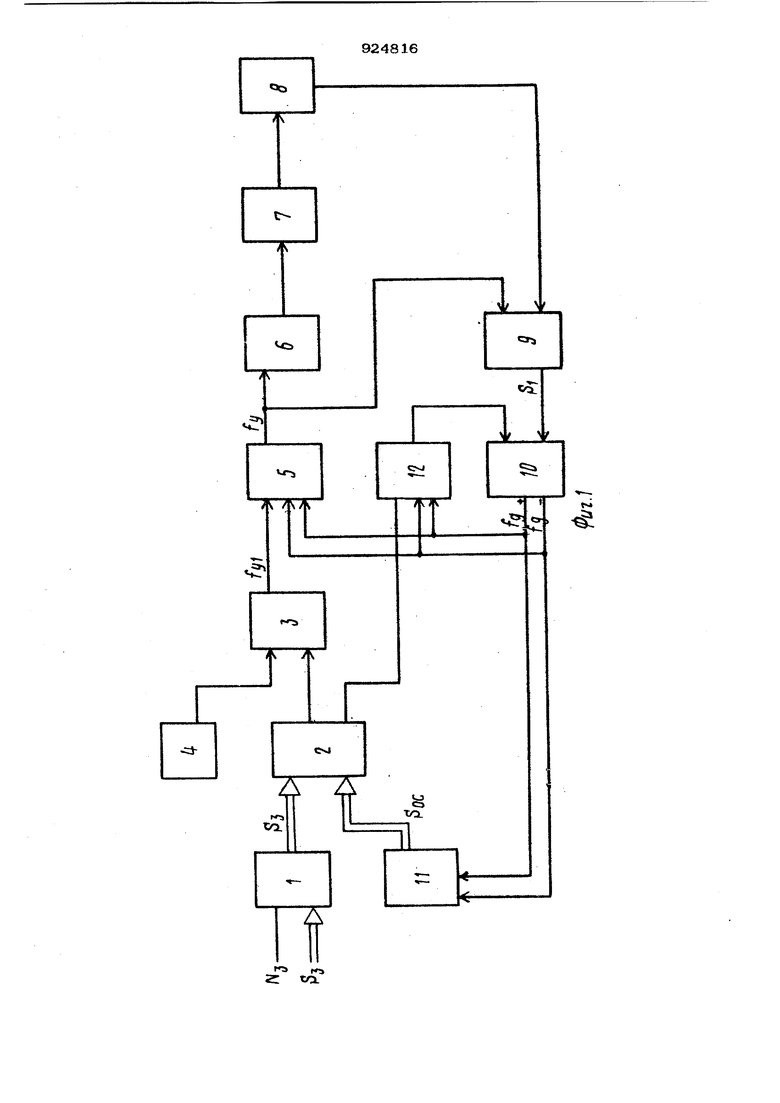
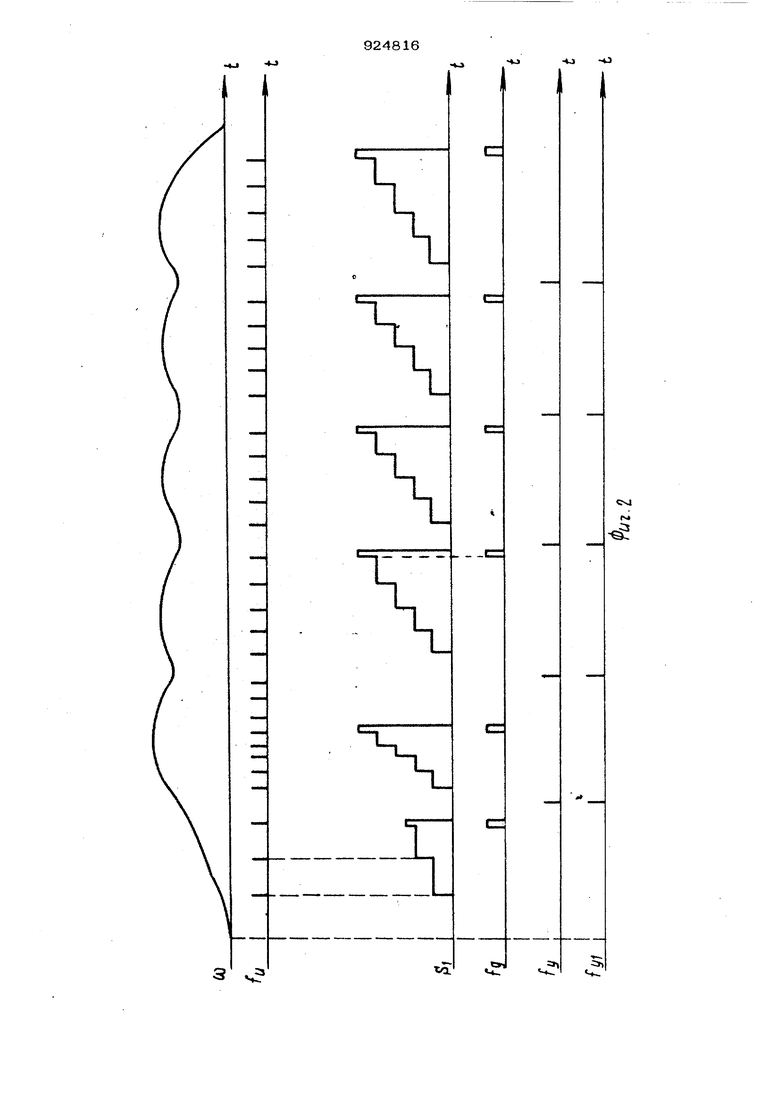
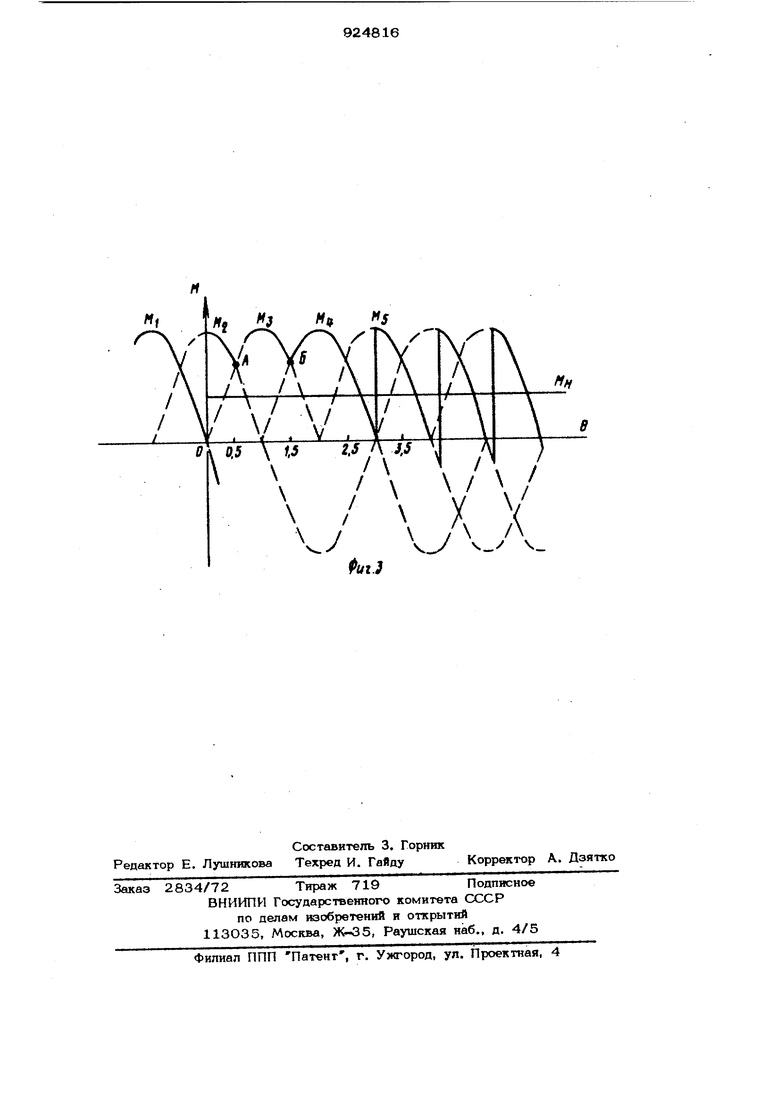
20 связанный, через элемент И и уэел разрешенияс входом коммутатора фаз шагового двигателя, введены триггер и I дешифратор, подключенный своими двумя 39 выходами к входам прямого и обратного счета реверсивного счетчика, входам уэла разрешения и единичным входам триггера, соединенного нулевым входом с выходом блока сравнения, а выходом с входом нулевого разряда дешифратора, подключенного входами всех разрядов к выходам нереверсивного счетчика, связанного входом установки нуля с выходом узла разрешения, а счетным входом с выходом датчика, число положений которого на один обооот в несколько раз превышает число шагов двигателя. На фиг. 1 приведена фкнкциональная блок-схема устройства; на фиг. 2 - ° временные диаграммы, иллюстрируюшие работу схемы; на фиг. 3 - угловые характеристики для четырехфазного шагового двигателя. Устройство для позиционного управления шаговым двигателем (фиг. 1) содержит блок 1 цифрового задания, блок 2 сравнения, элемент И 3, генератор 4 управляющих импульсов, узел 5 разрешения, коммутатор 6 фаз шагового дай- гателя 7 с импульсным датчиком 8 на валу. Выход датчика 8 подключен к входу счетчика 9, соединенного выходами с деши})ратором Ю. Реверсивный счетчик 11 связан входами прямого и обратного счета с выходами деши||ратора 10 и нулевыми входами триггера 12, подключенного единичным входом к выходу блока 2 сравнения, а выходом - к входу нулевого разряда дешифратора 1О. Датчик 8 вырабатывает число импульсов на один оборот вала двигателя в несколько раз превышающее число шагов. Устройство работает следующим образом. Число, соответствующее величине перемещения, записьпаается в блок 1 цифро вого задания либо в унитарном ( N} ), либо в параллельном ( 5 ) ) коде и пост пает на входы блока 2 сравнения в виде параллельного кода S з Сигнал обратной связи, соответствующий фактическому положению ротора шагового двигателя 7 вырабатывается также в параллельном коде { SQI) на выходах реверсивного счетчика 11 и поступает на входы блока 2 сравнения. При стоянке привода с второго выхода блока сравнения снимает ся сигнал Нуль рассоглйсования по положению, который по единичному входу перебрасьгаает триггер 12 в единичное состояние. Триггер 12 в свою очередь переключает дешифратор 10 на фиксацию числа импульсов, соответствующего по64«ловине шага двигагеля. Число 5i в блоке 2 сравнения сравнивается с сигналом о фактическом положении ( S(jc,), снимаемом с реверсивного счетчика 11. При наличии рассогласования по положению элемент И 3 открывается и импульсы с генератора 4 через узел 5 разрешения поступают на коммутатор 6 двигателя 7. Узел 5 разрешения представляет собой логическую схему, вьшолняю- щую следующие функции. 1. Формирование очередного управляющего импульса переключения фаз двигателя 7 ( f NJ ) при условиях подтверждения отрзаботки предыдущего шага (импульс д+, -) и прихода очередного импульса ( {) от генератора 4. 2. Удержание счетчика 9 в нуле от момента прихода импульса д дЛЧ1О момента прихода импульса ч (фиг. 2). 3. Изменение направления вращения двигателя 7 при изменении знака рассогласования заданного и отработанного перемещений (5 - 5 р.)После подачи управляющего импульса ( на фиг. 2) происходит коммутация фаз, и двигатель 7 приходит в движение ( ш на фиг. 3). От импульсного датчика 8 поступают импульсы ( f д на фиг. 2), которые подсчитываются счетчиком 9. После прохождения двигателем половины шага на одном из двух выходов дешифратора 10 появляется сигнал, свидетельствующий об отработке половины первого шага шаговым двигателем в положительную fд или отрицательную сторону вращения (если число импульсов , вырабатываемое датчиком 8 на один шаг двигателя, нечетное, то половина шага определяется с округлением). Импульс с одного из выходов дешифратора 10 (4 или f я ) поступает на один из равноценных входов узла 5, перюводит счетчик 9 в нуль и дает разрешение на прохождение следующего управляющего импульса ( д на фиг. 2). Этим обеспечивается поддержание угла рассогласования магнитных сх;ей статора и ротора в пределах одиого полупериода синхронизирующего момента (для четырехфазного двигателя с 4-тактной коммутацией). Одновременно сигнал А (д,) подается на один из двух нулевых входов триггера 12 и перебрасывает его в нулевое состояние. Триггер 12 переключает дешифратор 10 на фиксацию полного шага (числа импульсов, соответствующего одному шагу, взятому с округлением в сторону меньшего). После подачи второго уттравляющего , импульса двигатепь 7 продолжает вращат ся (uj иа фиг. 2), но импульсы на выхода дешифратора 1О вырабатываются при этом только после обработки целого шага (5, на фиг. 2). При вращении двигателя импульсы (- дешифратора 10. поступаю на входы реверсивного счетчика 11 и суммируются с накопленным в счетчике числом, или вычитаются из него. Дальше схема работает аналогично. После того, как числа S и Q сравняются, блок 2 сравнения вьщает сигнал и элемент И 3 запир)ается. Подача импульсов прекращается, и двигатель 7 останавливается в заданном положении. Колебания вала двигателя в данном случае не приводят к насчитыванию лож ных импульсов, так как счетчик 9 после прохождения числа импульсов, фиксирую- тих прохождение шага с точностью до одного импульса, на последнем такте коммутации сбрасывается в 1гуль и удер живается в нуле. Погрешность от некратности числа шагов двигателя 7 на оборот и числа импульсов датчика 8 на оборот в данной схеме не накапливается, так как счетчик 9 служит только для контроля отработки шагов. После осуществления этого контроля при отработке каждого очередного шага счетчик сбрасывается в нуль и держится в нуле до прихода очередного управляющего импульса. Рассматриваемое устройство позво- ляет повысить динамический момант двигателя при пуске за счет сдвига мо- , мента коммутации фаз относительно ротора. В исходном состоянии положение ша- гового дв1П ателя определяется характеристикой 14 (фиг. З). Предполагаем, что до начала вращения момент нагрузки М( О, при этом двигатель находитс в состоянии О (начало координат). При подаче первого управлгпощего им пульса происходит переключение фа и двигатель переходит на характеристик Wifj . Под действием синхронизирукиаего момента MQ двигатель начинает вращать ся. Второй управляющий импульс от гене ратора 4 пропускается на коммутатор 6 фвхЗ, когда придет сигнал об отработке половины первого шага (сигнал разрещения) по числу импульсов датчика. Для случая разгона со значительным статическим моментом, когда двигатель отрабатывает к моменту прихода от генератора 4 управляющего импульса не более 0,5 .шага, переход на характеристику W-i) произойдет в точке А. Для случая легкого разгона с малым статическим моментом М4. двигатепь к моменту прихода второго управляющего импульса пройдет больше половины шага, и процесс втягивания в синхронизм ускоряется. Если двигатель в конце второго такта ице не втянулся в синхронизм и при этом прошел не более 1,5 шага, то при подаче третьего управляющего импульса переключение на характеристику М4 произойдет в точке Б после отсчета числа импульсов, соответствующего полному шагу. Далее разрешение на прохождение очередного управляющего импульса от генератора подается после прохождения одного полного шага на предыдущем такте коммутации. Из фиг. 3 видно, что переключение на характеристику tAj происходит после отработки примерно 1,5 шага на третьем такте коммутации. Это свидетельствует о втягивании дв1п ателя в синхронизм. На последующих тактах наблюдается установившийся режим вращения. Частота управляющих импульсов генератора 4 выбирается такой, чтобы всегда обеспечивалось торможение двигателя в пределах одного щага при минимальном возможном моменте нагрузки. Практически эта частота может превышать в 1,3-1,5 раза частоту приемистости при моменте нагрузки близком к .номинальному моменту двигателя. Вьшадение двигателя из синхронизма в данном случае может быть обусловлено только значительным возрастанием момента нагрузки на валу двигателя выше номинального или внезапным реверсом привода. При выпбщении двигателя из синхронизма в рассматриваемом устройстве обеспечивается остановка двигателя без пропуска шага, а затем дальнейшая нормальная его работа при отсутствии вышеуказанных пр1гчин выпадения из cimxpoнвзма, что повьпиает надежность работы. Сдвиг момента переключения фаз на 0,5 шага при пуске обеспечивает увеличение среднего момента и, следовательно, сокращение времени вхождения двигателя в синхронизм. Формула изобретения Устройство для позиционного управления шаговым двигателем, содержащее
установленный на валу двигателя импульсный датчик, блок цифрового задания величины перемещения, реверсивный и нереверсивный счетчики импульсов, блок сравнения, генератор управляющих импуль сов, св5гзанный через элемент И и узел разрешения с входом коммутатора фаз шагового двигателя, отличаюшеес я тем, что, с целью повышения надежности в быстродействия при перемен- ной нагрузке на валу двигателя, в него введены триггер н дешифратор, подключенный своими двумя выходами к входам прямого и обратного счета реверсивного -счетчика, входам узла разрешения и иулевым вводам триггера, соединенного
единичным входом с выходом блока сравнения, а выходом - с входом нулевого разряда дешифратора, подключенного входами всех разрядов к выходу нереверсивного счетчика, связанного входом установки нуля с выходом узла разрешения, а счетным входом - с выходом датчика, число положений которого на один оборот в несколько раз превьпиает число шагов двигателя.
. Источники информации, принятые во внимание: при экспертизе
1.Авторское свидетельство СССР № 542319, кл. Н 02 Р 7/ОО, 1975.
2.Авторское свидетельство СССР № 468345, кл. Н О2 Р 7/62, 1973.
рKS
г: to.
40 -о

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU928592A1 |
| Устройство для управления шаговым двигателем | 1984 |
|
SU1246328A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1982 |
|
SU1045320A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1686691A1 |
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1520646A1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU875331A1 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| Система управления приводным пневматическим молотом | 1986 |
|
SU1353561A1 |
iv
ta . М)W,US w. ,.- .4
