(54) СЛЕДЯЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1977 |
|
SU682871A2 |
| АКУСТИЧЕСКИЙ ХЛАДОАГРЕГАТ, УСТРОЙСТВО ВОЗБУЖДЕНИЯ АКУСТИЧЕСКОГО ИЗЛУЧАТЕЛЯ | 2007 |
|
RU2359184C1 |
| Следящая система | 1979 |
|
SU903803A2 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЯМИ | 1972 |
|
SU341898A1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
| Устройство для измерения рабочего отрезка объективов | 1982 |
|
SU1049768A1 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ | 1971 |
|
SU301397A1 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| Электропривод переменного тока | 1984 |
|
SU1264293A1 |
| Электрический преобразователь для весов с циферблатным указателем | 1982 |
|
SU1048329A1 |
Изобретение относится к области автоматики и может быть использовано в системах дистанционного управления перемещением. Известны следящие приводы, содержащие сельсин-задатчик, сельсин-цатчик обратной связи, источник питания, усилитель мощности и двигатель . Из известных следящих приводов наиболее близким к изобретению по техни- ческой сущности является привод, содержащий сельсин-оадатчик, вы)сод которого через первый выпрямитель соединен с первым формирователем импульсов, сельсин-датчик обратной связи, соединенный через второй выпрямитель со вторым фор мирователем импульсов, сглаживающий фильтр, выход которого через усилитель мощности подключен к двигателю, выход первого формирователя импульсов соединен с первым делителем частоты, один выход которого подключен.к первому вхо ду фазового дискриминатора, а другой через первый преобразователь код-аналог к первому входу сумми 1ую1цего блока, выход второго формирователя импульсов соединен со вторым делителем частоты, ОД1Ш выход которого подключен ко второму -входу фазового дискриминатора, а другой через второй преобразователь код-аналог - ко второму входу суммирующего блока, 1ретий вход которого соединен с выходом фазового дискриминатора, а выход - со сглаживающим фильтром 2. Недостатком данного следящего привода является ограниченное быстродействие из-за значительной постоянной времени сглаживающего фильтра, которая вносит запаздывание в процесс управления. Этот недостаток особенно ярко проявляется при низких частотах источника питания сельсинов, например при частоте 5О Гц, и при применении в качестве усилителя мощности тиристорного преобразователя, управляющего быстродействующим двигателем с гладким якорем, который имеет малую постоянную
времени, В этом случае постоянная времени следящего привода практически пол« костью определяется постоянной времени сглаживающего фильтра, которая обратно пропорциональна частоте питания сельсинов.
Целью изобретения является повышение быстродействия привода.
Эта цель достигается тем, что в сле Дящий привод введены первый и второй блоки фазовращателей, первый и второй блоки выпрямителей, первый и второй блоки формирователей импульсов и первый и второй блоки кодирования, первые входы которых соединены соответственно с выходами первого и второго формирователей импульсов, к другим входам первого блока кодирования через последовательно соединенные первый блок формирователей импульсов, первый блок выпрямителей и первый блок фазовращателей подключен выход сельсин-оадатчика, к другим входам второго блока кодирования через последовательно соединенные второй блок формирователей импульсов, второй блок выпрямителей и второй блок фазовращателей подключен выход сельсин-датчика обратной связи, а выходы первого и второго блоков кодирования соединены соответственно со входами первого и второго преобразователей код-аналог.
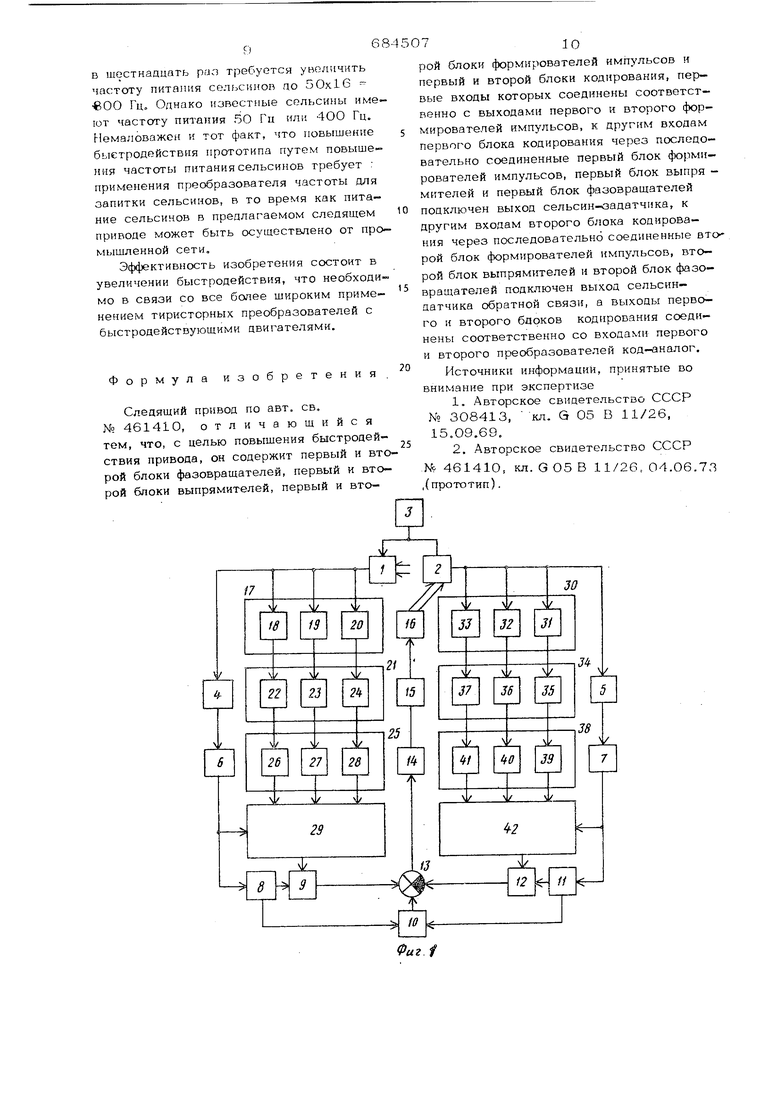
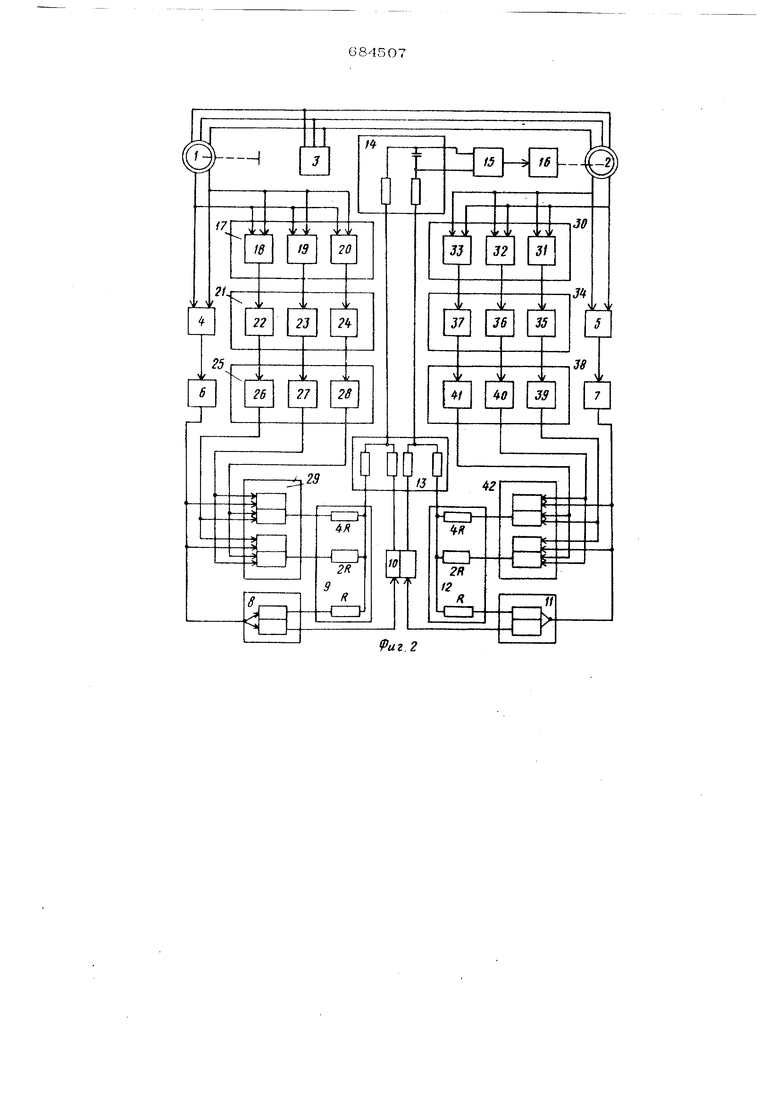
На фиг. 1 представлена структурная схема следящего привода; на фиг. 2 то же, с принципиальным выполнением некоторых блоков; на фиг. 3 - временные диаграммы следящего привода.
Следящий привод содержит сельсинзадатчик 1, сельсин-датчик 2 обратной связи, источник питания 3, первый 4 и второй 5 выпрямители, первый 6 и второй 7 формирователи импульсов, первый делитель частоты 8, первый преобразователь код-аналог 9, фазовый дискриминатор 10, второй делитель частсп-ы 11, второй преобразователь код-аналог 12, суммирующий блок 13, сглаживающий фильтр 14, усилитель мощности 15, двигатель 16, первый блок фазовращателей 17, первый 18, второй 19 и третий 2О фазовращатели первого блока фазовращателей, первый блок выпрямителей 21, первый 22, второй 23 и третий 24 выпрямители первого блока выпрямителе первый блок формирователей импульсов 25, первый 26, второй 27 и третий 28 формирователи импульсов первого блока формирователей импульсов, первый блок
кодирования 29, второй блок фазовращателей 30, первый 31, второй 32 и третий 33 фазовращатели второго блока фазовращателей, второй блок выпрямителей
34, первый 35, второй 36 и третий 37 выпрямители второго блока выпрямителей, второй блок формирователей импульсов 38, первый 39, второй 40 и третий 41 формирователи импульсов второго блока
формирователей импульсов и второй блок кодирования 42.
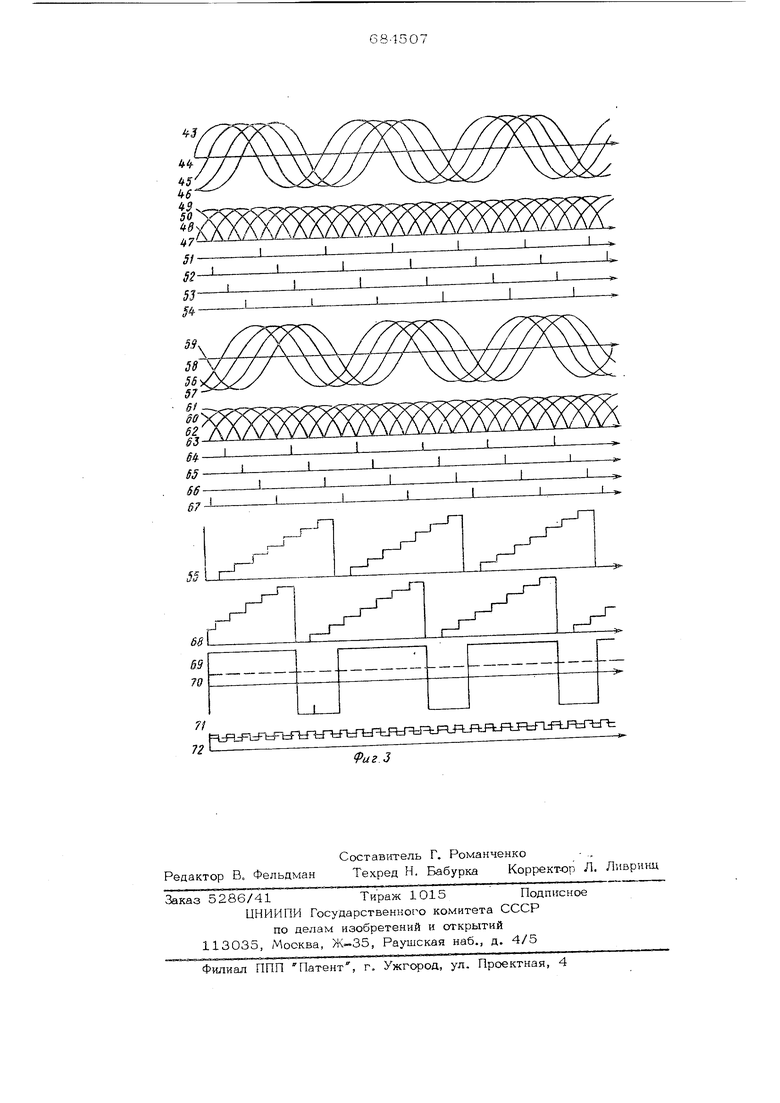
На фиг. 3 показаны сигнал 43 на выходе сельсина-задатчика 1, сигнал
44на выходе фазовращателя 18, си|-нал
45на выходе фазовращателя 19, сигнал
46на выходе фазовращателя 20, сигнал
47на выходе выпрямителя 4, сигнал
48ja выходе выпрямителя 22, стенал
49на выходе выпрямителя 23, сигнал
50на выходе выпрямителя 24, импульсы 51 на выходе формирователя импульсов 6, импульсы 52 на выходе формирователя импульсов 26, импульсы 53 на выходе формирователя импульсов 27, импульсы 54 на выходе формирователя импульсов 28, импульсы 55 на выходе преобразователя код-аналог 9, сигнал 56
на выходе сельсина-датчика 2, сигнал
57на выходе формирователя 31, сигнал
58на выходе фазовращателя 32, сигнал
59на выходе фазовращателя 33, сигнал
60на выходе выпрямителя 51, сигнал
61на выходе выпрямителя 35, сигнал
62на выходе выпрямителя 62, сигнал
63на выходе выпрямителя 37, импульсы 64 на выходе формирователя импульсов 7, импульсы 65 на выходе формирователя импульсов 39, импульсы 66 на выходе формирователя импульсов 40, импульсы 67 на выходе формирователя 41, импульсы 68 на выходе преобразователя код-аналог 42, импульсы 69 на выходе фазового дискриминатора 10, постоянная составляющая 7О в импульсах на выходе фазового дискриминатора 10, пульсирующий сигнал 71 на входе сглаживающего фильтра 14 и постоянная сос тавляющая 72 в пульсирующем сигнале
на выходе сглаживающего фильтра 14.
Следящий привод работает следующим образом.
Сельсин-аадатчик 1 и сельсин-датчик 2 обратной связи питаются от общего 5 источника питания 3, который представпяёт собой трехфазный генератор синусоидальных напряжений, сдвинутых относительно друг друга на 12О эл. град. Трехфазные обмотки статоров задатчика 1 и датчика 2 создают п них. вращающиеся магНитяые потоки, которые наводят в однофазных обмотках роторов синусоидальные сиг-налы постоянной амплитуды, фаза которых определяется положением валов задатчика и датчика. С выходов однофазных обмоток роторов задатчика и датчика 2 синусоидальные сигналы поступают на входы блоков фазовращателей 17 и ЗО. Каждый фазовращатель поворачивает фазу на величину, определяемую катичеством фазовращателей в блоке и номером фазовращателя в блоке причем сцвиги фаз между соседними син соидальными сигналами на входе и вы- ходах одного блока фазовращателей равны между собой и-в сумме составляют 180 эл, град. В рассматриваемом при- меро первые фазовращатели 18 и 31 поворачивают фазу на 45 эл. град., вто- рые фазовращатели 19 и 32 - на 9О эп град, третьи - фазовращатели 20 и 33 на 135 эл. град. В результате сдвиг фаз между синусоидальными сигналами на входе блока фазовращателей и на выходе первого фазовращателя этого блока равен сдвигу фаз между синусоидальными сигналами на выходах первого и второго фазовращателей одного блока, сдвигу фа между синусоидальными сигналами на выходах второго и третьего фазовращате лей одного блока, сдвигу фаз между сину соидальными сигналами на выходе и вход третьего фазовращателя и равен 45 эл. град. При этом сумма всех сдвигов фаз между синусоидальными сигналами на входе и выходах одного блока фазовраща телей составляет 180 эл.град. Синусоидальные сигналы с выходов задатчика 1 и датчика 2 поступают на входы выпрямителей 4 и 5, а синусоидальные сигналы с выходов фазовращателей 18 - 20 первого блока фазовращателей 17 и синусоидальные сигналы с выходов фазовра щателей 31 - 33 второго блока фазовра щателей 30 - соответственно на входы выпрямителей 22 - 24 первого блока выпрямителей 21 и на входы выпрямителей 35 - 37 второго блока выпрямителей 34, где формируются остроконечные сигналы удвоенной частоты. Так как при удвоении частоты удваивается фаза, то сдвиг фаз между соседними остроконечными сигналами, поступающими с вы- хода выпрямителя 4 на вход формирователя импульсов бис выходов выпрямителей 22-24 блока выпрямителей 21 на входы формирователей импульсов 26-28 блока формирователей импульсов 25, составляет 9О эл. град., а сумма этих сдвигов фаз равна 360 эл. град. Аналогично сдвиг фаз между соседними остроконечными сигналами, поступающими с выхода выпрямителя 5 на вход формирователя импульсов 7 и с выходов выпрямителей 35 - 37 блока выпрямителей 34 на входы формирователей импульсов 39 - 41 блока формирователей импульсов 38, составляет 90 эл. град., и сумма этих сдвигов фаз равна: 360 эл. град. Формирователи импульсов 6, 7, 26, 27, 28, 39, 40 и 41 формируют узкие импульсы с крутыми фронтами, которые поступают на блоки кодирования 29 п 42, пр;;чом импульсы, поступающие с выходов формирователей импульсов 6 и 7 из 15улевь е входы блоков кодирования 29 п 42, кодируют в них число О. Импульсы, пост пающие с выходов формирователей импульсов 26 п 39 на первые входы блоков кодирования 29 и 42, кодируют в них число 1. Импульсы, поступаюипю с выходов формирователей импульсов 27 и 40 на вторые входы блоков кодирования 29 ti 42, кодируют в них число 2. Импульсы, поступающие с выходов формирователей импульсов 28 и 41 на третьи входы блоков кодирования 29 и 42, кодируют в них число 3. С выходов формирователей имп7 льсов 6 и 7 t шyльсы поступают на входы целителей часто ты 8 и 11. С выходов дел1 телей частоты 8 и 11 и с выходов блоков кодирования сигналы поступают на входы преобразователей код-аналог 9, 12, где формируются ступенчато норастающие пилообразные импульсы, период которых равен периоду импульсов, поступающих с выходов делителей частоты 8 и 11 а входы дискриминатора 10, а период ступенчатого изменения равен периоду ду импульсами, поступающими с выходов двух соседних формирователей ихшульсов, т. е. с выходов формирователей импульсов, сдвиг фаз между выходными импульсами которых равен 90 эл. град., например, между выходными и тульсам11 формирователей 27 и 28, Вели П .на каждого ступенчатого изменения постоянна. Размах пилообразных п г1ульсов вен и равен величине неступенчатого . изменения, умноженной на максимальное число, которое поступить на входы преобразователя код-аналог. Во время поступления числа О luj оба входа одного преобразователя .чог с
.выхода этого преобразователя код-ана- , ло1 на вход блока суммирования 13 поступает нулевой сигнал;и с выхода делителя частоты на вход фазового дискриминатора 10 также поступает импульс. На выходе фазового дискриминатора 10 формируются прямоугольные импульсы, размах которых больше размаха пилообразных импульсов, формируемых преобразователем код-аналог, на величину
одного ступенчатого изменения, а постоянная составляющая в этих импульсах пропорциональна сдвигу фаз между синусоидальными сигналами, поступающими с выходов роторов задатчика 1 и датчика 2, который, в свою очередь, пропорционален разности углов поворота роторов задатчика 1 и датчика 2. В результате суммирования всех импульсов, поступающих на входы блока суммирования 13, в нем формируется пульсирующий сигнал, постоянная составляющая которого равна постоянной составляющей в выходных импульсах фазового дискриминатора 10, Период пульсаций равен периоду между импульсами, поступающими с выходов двух соседних формирователей импульсов, и размах пульсаций равен величине ступенчатого изменения. С выход блока суммирования 13 на вход сглаживающего фильтра 14 поступает пульсирующий сигнал, постоянная составляющая которого равна постоянной составляющей в выходных импульсах фазового дискриминатора 10, период пульсаций этого сигнала меньше периода выходных импульсов фазового дискриминатора 10 в (71-И) раз и размах пульсаций этого сигнала Меньше размаха выходных импульсов в ( tn+l) раз. Сглаживающим фильтром 14 Сигнал сглаживается, т. 9, выделяется Постоянная составляющая этого сигнала. Подается на вход усилителя мощности 15 и далее на двигатель 1G с запаздыванием, определяемым постоянной времени сглаживающего фильтра 14. Если при отсутствии разности углов поворота роторов задатчика 1 и датчика 2 вал за- датчика 1 не вращается, то нет сдвига фаз между синусоидальными сигналами, поступающими с выходов роторов задатчика 1 и датчика 2, поэтому постоянная составляющая пульсирующего сигнала на Входе сглаживающего фильтра 14 равна нулю, и сигнал на выходе сглаживающего фильтра 14 равен, нулю. В результате сигнал на выходе двигателя 16 оказывается равным нулю, и двигатель не
вращается. Нсли при этом резко начать вращать вал задатчика 1 и продолжать вращение с постоянной скоростью, то в первый момент времени двигатель 16 вращаться не будет. В результате появляется сдвиг фаз между синусоидальными сигналами на выходах роторов задат- чнка 1 и датчика 2, а в пульсирующем сигнале на входе Сглаживающего фильтра 14 появляется постоянная составляющая, пропорциональная этому сдвигу фаз. Однако на выходе сглаживающего фильтг)а 14 постоянная составляющая появляется с запаздыванием, опреде-тя- емым постоянной времени этого фильтра. В результате вращение вала датчика 2 начинается с запаздыванием и тем Ьольшим, чМ больще постоянная времени сглаживающего фильтра 14. Если поело полного набора скорости валом датчика 2 резко остановить вал задатчика 1, то аналогично вышеописанному набору скорости вал датчика 2 остановится с запаздыванием и тем болыиим, чем больще постоянная времени сглаживающего фильтра 14. Постоянная сглаживающего фильтра 14 прямо пропорциональна периоду и размаху пульсаций в пульсирующем сигнале, поступающем на его вход.
Использование новых элементов-блоков фазовращателей, блоков выпрямителей, блоков формирователей импульсов и блоков кодирования выгодно отличает предлагаемый следящий привод от указанного прототипа, так как позволяет уменьшить постоянную времени сглаживающего фильтра в (гп + 1) раз и таким образом резко увеличить быстродействие следящего привода. В рассмотренном при мере, когда количество фазовращателей в каждом блоке фазовращателей равно трем, т. е. m 3, постоянная времени сглаживающего фильтра может быть уменшена в шестнадцать раз. При применении малоинерционного двигателя с гладким якорем и тиристорного усилителя мощности такое уменьшение постоянной времени сглаживающего фильтра увеличивает быстродействие следящего привода в шеснадцать раз. Кроме того, традиционное повышение быстродействия прототипа путем увеличения частоты питания сельсинов НС позволяет получить такого же результата, что в предлагаемом следящем приводе. Например, если частота питания сельсинов в прототипе выбрана равной 5О Гц, то.для повышения быстродействия в шестнадцать раз требуется увеличить частоту питалня сельсинов цо 5Ох16 вОО Гц. Однако известные сельсины име ют частоту питания 50 Гц или 4ОО Гц. Немаловажен и тот факт, что повышение быстродействия црототипа путем повышения частоты питания сельсинов требует : применения преобразователя частоты для запитки сельсинов, в то время как питание сельсинов в предлагаемом следящем приводе может быть осуществлено от про мышленной сети. Эффективность изобретения состоит в увеличении быстродействия, что необходи МО в связи со все более широким применением тиристорных преобразователей с быстродействующими двигателями. Формула изобретения Следящий привод по авт, ев, № 461410, отличающийся тем, что, с целью повышения быстродействия привода, он содержит первый и вто рой блоки фазовращателей, первый и второй блоки выпрямителей, первый и втоФиг 1 рой блоки формирователей импульсов и первый и второй блоки кодирова ия, первые входы которых соединены соответственно с выходами первого и второго формирователей импульсов, к другим входам первого блока кодирования через последовательно соединенные первый блок формирователей импульсов, первый блок выпря мителей и первый блок фазовращателей подключен выход сельсин-оадатчика, к другим входам второго блока кодирования через последовательно соединенные вто рой блок формирователей импульсов, второй блок выпрямителей и второй блок фазовращателей подключен выход сельсиндатчика обратной связи, а выходы первого и второго блоков кодирования соединены соответственно со входами первого и второго преобразователей код-аналог. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 308413, кл. Q 05 В 11/26, 15,09.69. 2.Авторское свидетельство СССР № 461410, кл. G 05 В 11/26. 04.06.73 (прототип).
Риг 2
L
J
tfbrbrbfbdT J4 rbFLFU4J y4d J
HzHjFbFbPt
72
иг J
