10
15
20
25
11241
Изобретение относится к автоматике, в частности к следящим системам ; металлорежущих станков , и может,най ти применение в различных системах регулирования с цифровым управлением.
Целью изобретения является повы- шение точности и надежности. .
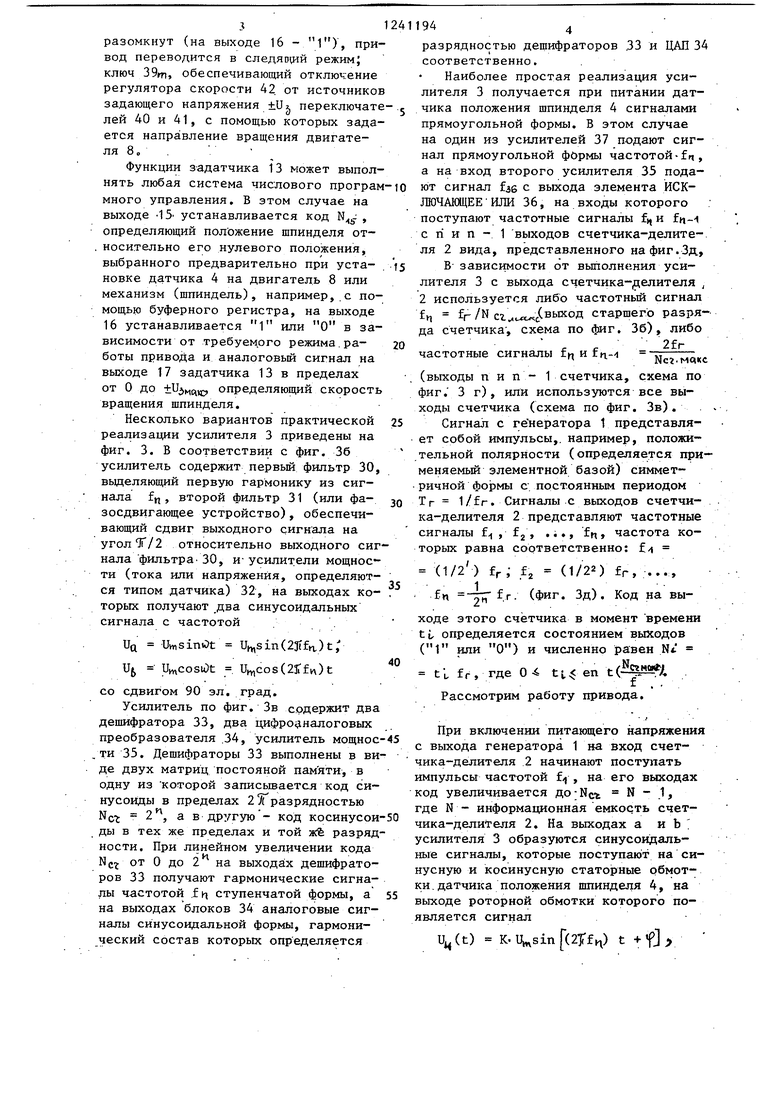
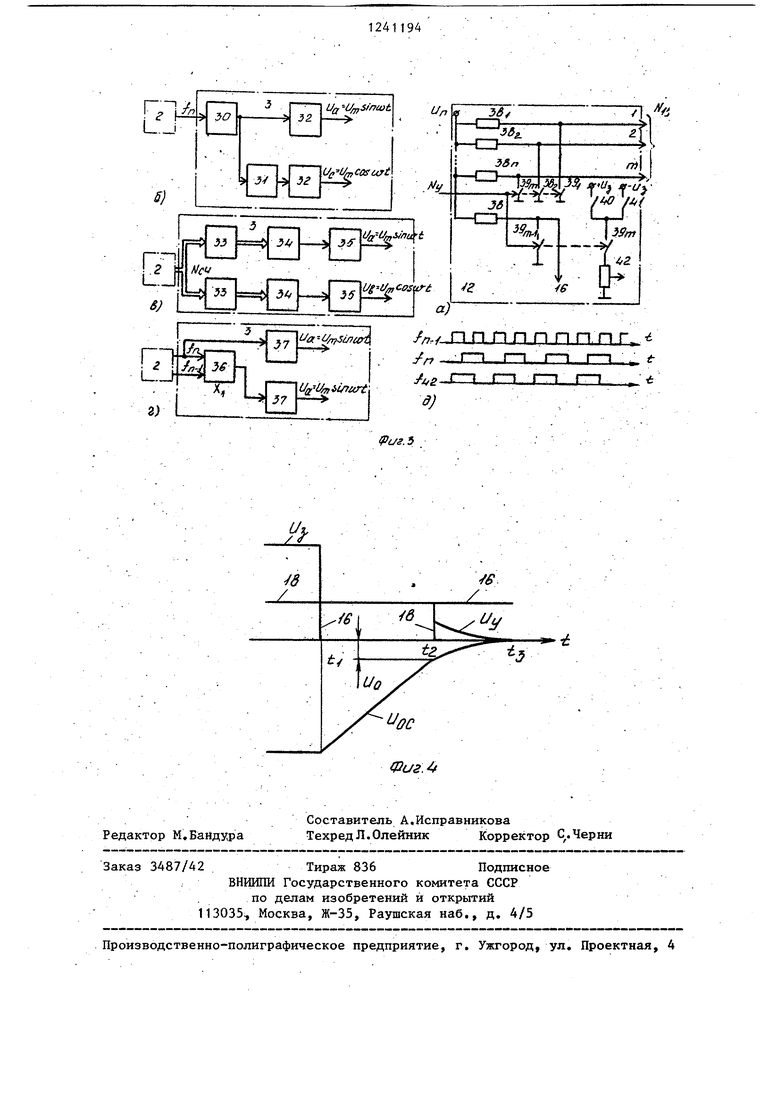
. На фиг. 1 показана схема привода; на фиг. 2 - схема блока управления и схема фазового дискриминатора; на фиг. З.а - схема задатчика (на фиг.36, в и г - варианты выполнения усилителя) J на фиг. 4 - диаграмма работы привода.
На фиг. 1 обозначено: с и Ь - вы- ходы усилителя; Uy - выходное напря-. жение фазового дискриминатора; U - напряжение, задающее скорость вращения шпинделя; Ucc напряжение йа вы- ходе тахогенератора; UG - опорное напряжение на входе компаратора; Net °Д счетчика-делителя; Nj код задание скорости .шпинделя.
Н.а фиг, 3 обозначено: fn-/i , fn -; частота на выходе соответствующего разряда счетчика-делит,еля, Uo , Ub , Uj, - напряжения на выходах усилителя, N,15- код на выходе задатчика.
Привод содержит генератор 1, счетчик-делитель 2, усилитель 3, датчик положения ш пинделя 4, фильтр-формирователь 5, фазовый дискримина тор 6, усилитель мощности 7, двигатель 8, тахогенератор 9, компаратор 10, сумматор 11, блок управления 12, задат- чик 13, формирователь 14, выходы 15, 16 и 17 задатчика 13, выход 18 блока управления 12, входы 19 и 20 фаз ово- .го дискриминатора -6, входы 21 и 22 блока управления 12, входы 23 и 24 формирователя 14,
Фазовый дискриминатор 6 содержит элементы ИЛИ-НЕ 25, D-триггеры 26 фильтр 27,
Блок управления содержит D-тригге- ры 28, ключ 29. Усилитель 3 на фиг. 36 содержит фильтры 30, 31, усилители 32, Усилитель. 3 на фиг, Зв содержит дешифраторы кодов 33, цифро- аналоговые преобразоват.ели 34, усилители мощности 35. Усилитель 3 на фиг. 3 г содержит элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 36, усилители мощности 37. Блок управления 12 содержит резисторы 38, 38 , 38
30
35
40
45
50
2
38ц, ключи 39,
3.9,j, .,., 39(т переключатели 40, 41, регулятор скорости 42.,
Фазо.вый дискриминатор 6 содержит ; два D-триггера 26, элемента ИЛИ55
5
0
5
1
194 2
НЕ 25.и фильтр. 27, выходное напряжение которого Uy К-л Т с -учетом знака, .где а Т временной интервал между импульсами 19 и 20 выходов фильтра- . формирователя 5 и формирователя 14. При наличии сигнала единичного уровня, на выходе 18 ключа 29 на выходах элементов ИЛИ-НЕ 25 сигналы нулевого уровня и триггеры не переключаются, на их прямых выходах сигналы нулевого уровня, дТ О и Uy 0, Триггеры переключаются при наличии сигнала нулевого уровня на выходе 18 ключа 29, причем переключается только один триггер, на С-вхоД которого .поступает импульс первым,
В- качестве формирователя 14 может быть использована любая известная -схема, например диффереьщирующа.я RC- цепь, включенная на выходе сумматора 11 и обеспечивающая формирование импульса единичного уровня с длительностью С- 1/fr при изменении сигнаО
0
5
0
5
0
ла на выходе сумматора 11 с
1 л II
I , .
на
5
Б качестве датчика положения используется вращающийся трансформатор (ВТ, ВТМ, СКВТ и др.) с числом пар полюсов 2р 1. Принципиально может быть использован сельсин, при этом .нужно только изменить усилитель 3, который в этом случае должел обеспечивать на выходе сигналы UmsintOt, сдвинутые друг относительно друга на 2Т/3 эл, град.
Блок управления 12 содержит D-триг- гер 28 и ключ.. 29, на выходе .18 которого появляется разрешающий сигнал нулевого уровня только при наличии на выходе 16 задатчика 13 и выходе компаратора 10 сигналов единичного уровня о Уровень сигнала на выходе 16 задатчика 13 определяется положением ключа 39гц-4. Когда ключ замкнут, на выходе 16 - О, ключ 39 разомкнут, на выходе 16 - 1,
Уровень сигнала на выходе компаратора 10 зависит от модуля величины напряжения Uoc , При Uo /Uoc,/ на выходе компаратора - 1,
Задатчик 13 содержит: ключи 39., , 392, 39tn-i с помощью которых задается код в двоичном коде: ключи замкнуты, О, ключи р азомк- нуты, N,5 , ключ 39 , с помощью которого задается режим работы привода: ключ замкнут (на выходе 16 - О), привод работает в режиме регулирования скорости, ключ
3
разомкнут (на выходе 16 - 1), привод переводится в следяп(ий режим; ключ 39т, обеспечивающий отключение регулятора скорости 42 от источников задающего напряжения tUjj переключате лей 40 и 41, с помощью которых задается направление вращения двигателя 8 .
Функции з-адатчика 13 может выполнять любая система числового програм много управления. В этом случае на выходе -15 устанавливается код , определяющий положение щпинделя относительно его нулевого положения, выбранного предварительно при уста- ковке датчика 4 на двигатель 8 или механизм (шпиндель), например, с помощью буферного регистра, на выходе 16 устанавливается 1 или О в зависимости от требуемрго режима.ра- боты привода и аналоговый сигнал на выходе 17 задатчика 13 в пределах от О до tU MciH-, определяющий скорость вращения шпинделя.
Несколько вариантов практической реализации усилителя 3 приведены на фиг. 3. В соответствии с фиг. 36 усилитель содержит первьй фильтр 30, вьщеляющий первую гармонику из сигнала fц, второй фильтр 31 (или фа- зосдвигающее устройство), обеспечивающий сдвиг выходного сигнала на угол Т/2 относительно выходного сигнала фильтра 30, и-усилители мощности (тока или напряжения, определяют- ся типом датчика) 32, на выходах ко- торых получают два синусоидальных сигнала с частотой
Цц UvnsinOt Un,sin(23ifa)t, U U xCosiOt Ujy,cos(2irfrt)t
CO сдвигом 90 ЭЛ. град.
Усилитель по фиг. Зв содержит два дешифратора 33, два цифро;дналоговых преобразователя .34, усилитель мощнос.ти 35. Дешифраторы 33 выполнены в виде двух матриц постояной памяти, в одну из которой записьшается код синусоиды в пределах 25Гразрядностью Net 2, а в другую - код косинусоиды в тех же пределах и той fe разрядности. При линейном увеличении кода NC от О до 2 на выходах дешифраторов 33 получают гармонические сигналы частотой .f k| ступенчатой формы, а на выходах блоков 34 аналоговые сигналы синусоидальной формы, гармонический состав которых определяется
1944
разрядностью дещифраторов 33 и ЦАП 34 соответственно.
Наиболее простая реализация усилителя 3 получается при питании датчика положения шпинделя 4 сигналами прямоугольной формы. В этом случае на один из усилителей 37 подают сигнал прямоугольной формы частотой-fn, а на вход второго усилителя 35 подают сигнал зб с выхода элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 36, на входы которого поступают частотные сигналы f,, и ц-1 с ri и п - 1 выходов счетчика-делителя 2 вида, представленного нафиг.Зд.,
В зависимости от выполнения усилителя 3 с выхода счетчика-релителя , 2 используется либо частотный сигнал fn г/«сгисл«с выход старшего разряда счетчика; схема по фиг. 36), либо
f 2fr частотные сигналы t и Тц-л м 7йй«кс
(выходы п и п - 1 счетчика, схема по фиг. 3 г), или используются все выходы счетчика (схема по фиг. Зв).
Сигнал с ге нератора 1 представляет собой импульсы,, например, положительной полярности (определяется при- меняемьй элементной базой) симметричной формы с постоянным периодом Тг 1/fг. Сигналы с выходов счетчика-делителя 2 представляют частотные сигналы f , f2, .i,, fц, частота ко- . торых равна соответственно: f/
(1/2) fr, fz (1/22) f .... fn . (фиг. Зд). Код на выходе этого счётчика в момент времени ti, определяется состоянием выходов (1 или О) и численно равен Nt
tl fr. где 0 Рассмотрим работу привода.
При включении питающего напряжения с выхода генератора 1 на вход счетчика-делителя 2 начинают поступать импульсы частотой , на его выходах код увеличивается до;NCI N - 1, где N - информационная емкость счетчика-делителя 2. На выходах а и b усилителя 3 образуются синусоидальные сигналы, которые поступают на синусную и косинусную статорные обмотки .датчика положения шпинделя 4, на выходе роторной обмотки которого появляется сигнал
U(t) К. (2Tfих) t +f
1
где К - коэффициент трансформации ,
датчика 4,
- угол поворота ротора относительно статора
На выходе фильтра-формирователя 5 появляется один раз за период напряжения U( импульс положительной полярности, поступающий на вход 19 фазового дискриминатора 6. На другой его вход 20 с той же частотой .поступает такж импульс положительной полярности с выхода формирователя 14. Сигнал Uy на выходе фазового дискриминатора 6 пропорционален временному интервалу между шотульсами по входа 19 и 20 с учетом знака (кто первый). При включении привода на выходе 16 задатчика 13 появляется О, на выходе D-триггера 28 устанавливается также О, на выходе 18 ключа 29 - 1, на выходах элементов ИЛИ-НЕ 25 - ОУ р-триггеры 26 не переключаются и на их прямых выходах О, а Ui/ 0. .
В режиме регулирования скорости ключ 39tn-i замкнут. З амыкая ключ 39т, переключатели 40 или 41, регулятором скорости 42 изменяют U. от О до максимального значения и регулируют скорость двигателя 8. При Uo /Uoc / на входе 22 компаратора 10 обеспечивается сигнал нулевого уровня.
В зависимости от режима работы привода на двигателе 8 получают выходное напряжение усилителя мощности равноеи« KyC+Uj + Uec) или Uj Kr(±U., rUoc).
При подаче команды Ориентация шпинделя ключом обеспечивают на выходе 16 задатчика 13 сигнал единичного уровня, размыкая одновременно ключи 39т- , 3. Сигнал задания и исчезает, двигатель тормозится и при Uo/ /Upc./ на входе 22 компаратора 10 появляется сигнал единичного уровня. Импульсом fa с выхода генератора 1 D-триггер 28 устанавливается в состояние 1, на его выходе, на выходе 18 ключа 29 появляется сигнал нулевого уровня, обеспечивая тем самым возможность переключения триггеров при поступлении импульсов по входам 19 и 20. Эти импульсы поступают на С- и R-входы D-триггеров 26.
Предположим, что импульс по входу 19 опережает импульс по входу 20.
o
5
0
5
0
5
5
0
5
Учитывая, что на инверсных выходах D-триггеров 26 установлены 1 (соответственно и на их D-входах),. по переднему фронту импульса по входу 19 верхний В-тр.иггер 26 переключается и на его прямом выходе устанавливается сигнал, единичного уровня, на выходе фильтра 27 появляется сигнал положительной полярности.
Одновременно импульс по входу 19 через нижний элемент ИЛИ-НЕ 25 поступает на R-вход D-триггера 26, подтверждая на его инверсном выходе сигнал единичного уровня. При приходе импульса по входу 20 и поступлении его на С-вход нижнего D-триггера 26 последний не переключится, так как на его D-входе (инверсный выход верх-, него D-триггера 26) - О. Этим сигналом через верхний элемент ИЛИ- НЕ 25 верхний D-триггер 26 выключается, на его прямом выходе устанав- ливается О. Учитьшая, что напряжение Uy является сигналом обратной связи по углу вала двигателя 8, измеряемого датчиком положения шпинделя 4, двигатель вращается в таком направлении, чтобы уменьшить этот сигнал. Далее работа вьш1еописаннь1х элементов повторяется и сигнал стремится к нулю,, а шпиндель занимает п.оложечие, соответствующее, его исходному.
Изменяя код N, (устанавливая ключи 39х,, 39, ..., 3%-г. в замкнутое или разомкнутое состояние), регулируют исходную точку положения шпинделя. В этом случае код счётчика . NC, складьюается с кодом N и на входе 23 сумматора 11 (выход переноса) фаза импульса сдвигается в лре- делах 25Г, обеспечивая в этих преде-, Л51Х смещение исходной точки шпинделя.
Выбором Net, величины Uo и коэффициента переда:чи фазового.дискриминатора 6 добиваются высокой точности ориентации шпинделя, которая практически ограничивается собственной приборной погрешностью датчика положения шпинделя 4(,
Допустим, что привод (фиг.. 4) работал с заданной скоростью iO/aa определяемой величиной напряжения задания, и Кос . где Кос коэффициент передачи тахогенератора. В момент времени t поступает команда на ориентацию (сигнал единичного уровня на выходе 16), при этом Щ 0,
двигатель тормозится и при / Uoc/ о появляется сигнал нулевого уровня на выходе 18, на вход привода поступает сигнал Uy и привод в следующем режиме; со скоростью . Uo/Koc-, с учетом, что Ug КуС+Лу Uoc.) приходит в заданное положение, определяемое кодом Nj, .
Устройство является простым в тех нической реализации, высоконадежно, обладает высокой помехозащищенностью так как. фазовый сдвиг сигналов 19 и 20, опГределяющий точку ориентации шпинделя, циклически повторяется с частотой питания датчика положения шпинделя 4 (изменение кода счетчик а- делителя 2 в случае помехи одновременно приводит к изменению фазы сигнала датчика 4), а угол f в предела 2Т является абсолютным значением (абсолютная система измерения по сравнению со следящей системой с фотоимпульсным датчиком положения, в которой измерение положения шпинделя является относительным, что не требует запоминания положения шпинделя при выключении питания).
Ф .о р м у л а и з о б р е т е и и я
1. Привод ориентации шпинделя металлорежущего станка, содержащий усилитель, двигатель, последовательно соединенные датчик положения шпинделя, фильтр-формирователь, фазовьй дискриминатор и усилитель мощности, а также генератор и счетчик-делитель ротор датчика положения шпинделя кинематически связан о двигателем, отличающийся тем, что, с целью повышения точности и надежности, привод содержит последовательQ5 . о 5
0
5
д
но соединенные тахогенератор, компаратор и блок управления, а также последовательно соединенные задатчик, сумматор и формирователь, выход которого подключен к второму входу фазового дискриминатора, третий вход которого соединен с выходом блока управления, второй вход которого подключен к выходу генератора, третий вход блока управления соединен с вторым выходом задатчика, третий выход которого подключен к второму входу усилителя мощности, соединенного выходом с входом двигателя, третий вход усилителя мощности подключен к выходу тахогенератора, выхо-. ды счетчика-делителя соединены с вторыми входами сумматора и входами усилителя, выходы которого подключены к входам и косинусной статорных обмоток датчика положения шпинделя, второй вход формирорателя соединен с выходом старшего разряда счетчика-делителя, тахогенератор кинематически связан с двигателемj вход задатчика является входом кода задания положения шпинделя и режима работы привода, второй вход компара-, тора является входом опорного напря,- жения. ..
I .
2. Привод по п. 1, о т л и ч а ю- щ и и с я тем, чтр блок управления родержит последовательно соединеиные й-тритгера и ключ, выход которого является вькрдом блока управления, D-вход В -триггера является первым входом блока управления, Г-вход - его вторым входом, а Я -вход D-триггера соединен с вторым входом ключа и является третьим входом блока уп- равления. . .
Фиэ.
ТТТУ: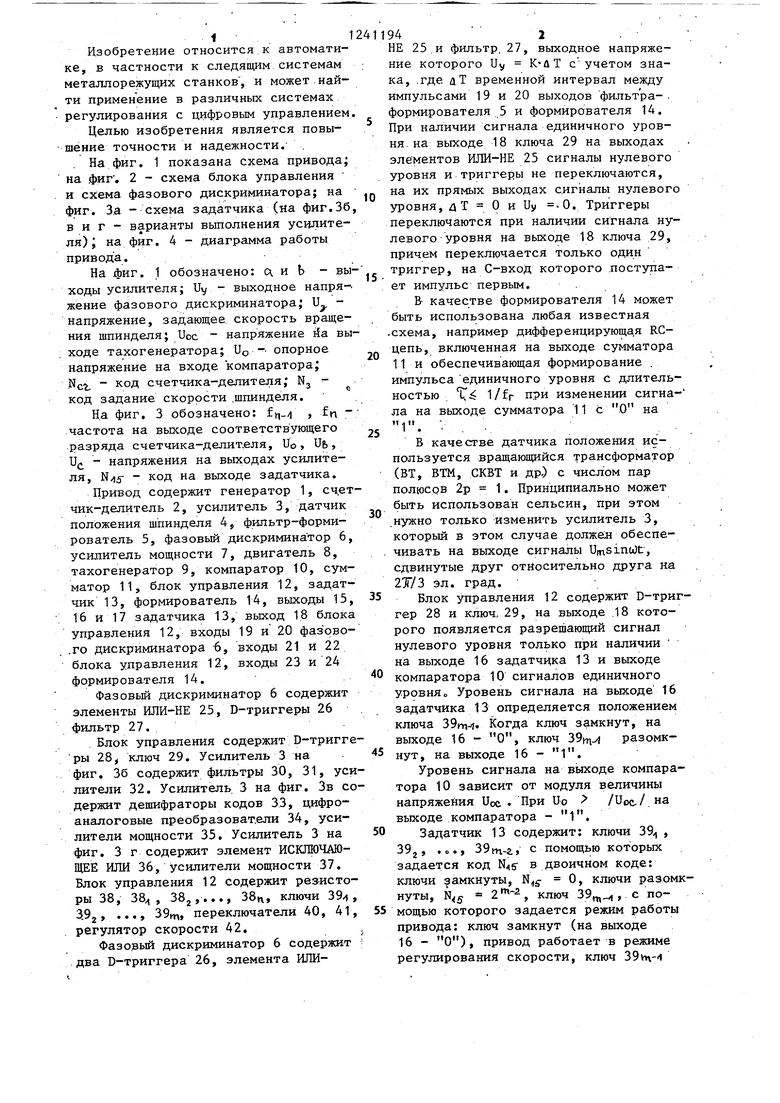

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Устройство для программного управления электроприводом | 1980 |
|
SU1198458A1 |
| Цифровая следящая система | 1980 |
|
SU962845A1 |
| УСТРОЙСТВО ДЛЯ СПЕКТРАЛЬНОГО АНАЛИЗА | 1991 |
|
RU2031375C1 |
| Устройство для установки и стабилизации фазового положения блока вращающихся головок | 1986 |
|
SU1515195A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Аналого-цифровое устройство для управления токарным станком | 1980 |
|
SU947830A1 |
| Система регулирования многоцилиндрового дизеля | 1989 |
|
SU1657703A1 |
| Автоматический цифровой измеритель коэффициента гармоник | 1980 |
|
SU911363A1 |
Изобретение относится к автоматике, в частности к следящим системам металлорежущих станков. Цель изобретения - повышение точности и надежности. При включении питающего напряжения с выхода генератора поступают импульсы, на выходах счетчика- делителя код увеличивается до N - I. На выходах усилителя обра- . зуются синусоидальные сигналы, поступающие на статорные обмотки датчика положения, на выходе его роторной обмотки появляется сигнал. На выходе фильтра-формирователя появляется им-. пул ьс, поступающий на вход фазового дискри№1натора; на другой его вход -поступает импульс с формирователя. Сигнал на выходе фазового дискриминатора пропорционален временному интервалу между импульсами на его входе. В режиме регулирования скорости ключ К (71-1 . замкнут. Замыкая ключи К, Kg, или Кц,. регулятором скорости PC изменяют Uy от О до максимума и регулируют скорость двигателя. При подаче команды Ориентация, шпинделя ключом Кгп- обеспечивают на выходе блока задания сигн.ал 1. .Сигнал U,. .исчезает, двигатель тормозится и при УО /Uoc / на выходе компаратора, появится Напряжение Uy является сигналом обратной связи по углу вала двигателя, двигатель вращается в таком направлении, чтобы уменьшить этот сигнал, сигнал Uy стремится к О, а амплитуда занимает, положение, соответствующее его исходному. Изменяя код Ny, регулируют исходную точку положения шпинделя. Выбором Net величины Uo и коэффициента передачи фазового дискриминатора добиваются высокой точности ориентации шпинделя. 1 з,п, ф-лы, 4 ил. о. (Л с to 4 CD 4
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ФРГ | |||
| Михеев | |||
| Ю.Е., Сосонкин В.Л | |||
| Системы автоматического, управления станками | |||
| М.: Машиностроение, 1978, с | |||
| Деревянное стыковое устройство | 1920 |
|
SU163A1 |
| Способ получения продукта конденсации бетанафтола с формальдегидом | 1923 |
|
SU131A1 |
