Известная цифровая система управления скоростями электроприводов секций бумагои картоноделательных машин, включающая задающий генератор стабильной частоты, делители частоты, вентили для вы.борки импульсов, формирователь импульсов, два сельсина, Преобразователь фаза-код, фазовый дискриминатор, схемы сложения и вычитания, не обеспечивает повыщевия быстродействия.
|В предлагаемой цифровой системе в отличие от известной для повышения быстродействия выход схемы сложения подключен параллельно к Преобразователям имлульсов в фазовый сдвиг я в напряжение, причем выход первого преобразователя подключен к фазовому дискриминатору, к которому также подключен первый сельсин, выход второго преобразавателя соединен с блоком сравнения, на вход которого подключен второй сельсин, а фазовый дискриминатор и блок сравнения через схему сложения и силовой преобразователь подключены к электродвигателю секции.
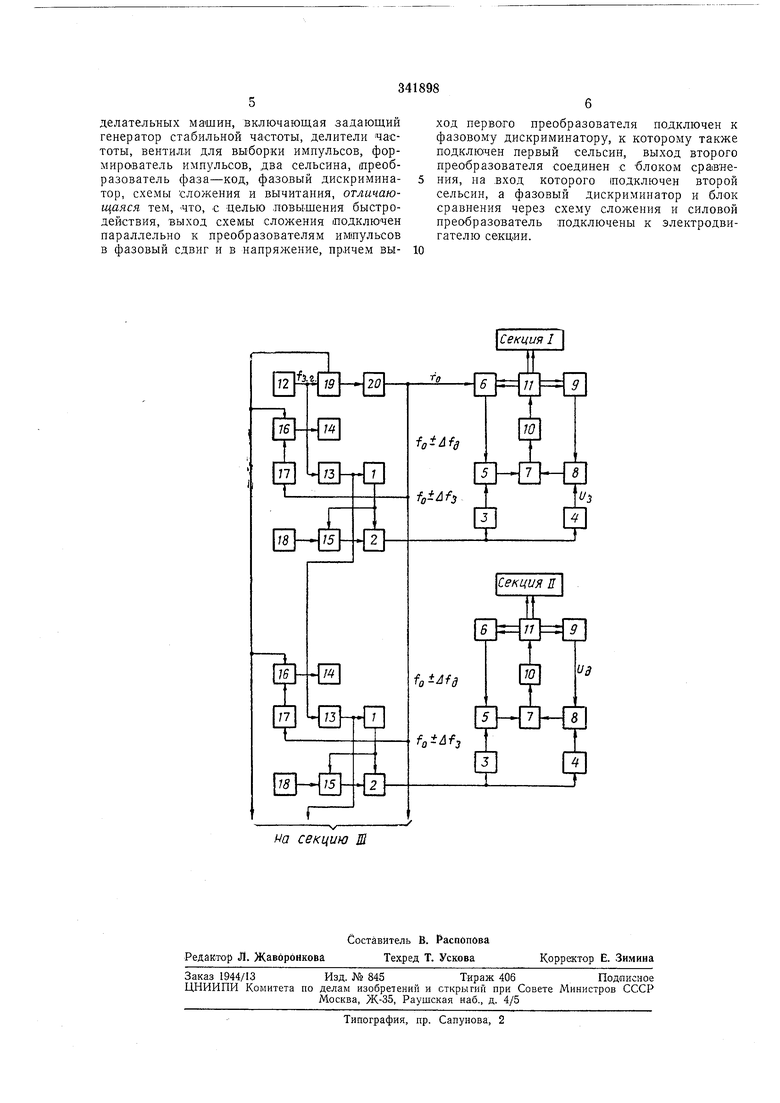
Блок-схема описываемой цифровой системы изображена на чертеже.
пропорциональный числу импульсов, и ко входу преобрававателя 4 имлульсов в напряжение, цропорциональное частоте импульсов; причем выход преобразователя 3 подключен к одному из входов фазового дискриминатора 5, к другому входу которого подклЮчен выход датчика 6 обратной связи по положению (сельсина-фазовращателя), а выход фазового дискриминатора 5 подключен к одному из входов схемы сложения 7, к другому входу которой подключен выход блока сравнения 8, (ВХОДЫ последнего подключены к выходам преобразователя 4 и датчика 9 обратной связи по скорости (тахогенератора). Выход схемы сложения 7 подключен через силовой преобразователь 10 к электродвигателю 1} секции П, кинематически связанному с датчиками б и 5.
Работает система следующим образом. В качестве примера использования ттредлагаемой системы рассматривается случай, когда задание уровня скорости мащины и соотношения скоростей между секциями осуществляется посредством оперативных задатчиков в виде бесконтактных сельсинов в режиме фазовращателей с циклическими преобразователями фаза-код, а индивидуальная подстройка скорости каждой секции производится любым способом, например с помощью
Частота /з.г с выхода задающего генератора 12 (например, с кварцевой стабилизацией) подается через схему вычитания 13 в делитель частоты / секции / с груииами ,вентилей 14 и 15. Группа вентилей 14 этой секции управляется двухотсчетным циклическим преобразователем фаза-код 16, преобразующим в параллельный цифровой код фазы двух бесконтактных сельсинов в режиме фазовращателей, связанных кинематически редуктором, так что вместе они образуют двухотсчетный оперативный задатчик 17 скорости мащины (сек1ции /). Вьгборка импульсов из делятеля частоты секции / с помощью группы вентилей 14 при условии, что на входе делителя частоты осуществляется, например, вычитание импульсов выборки посредством схемы вычитания 13, обеспечивает щирокий диапазон изменения частоты выходной последовательности импульсов делителя частоты секции / по требуемому функциональному закону при сохранении малой величины изменения последней.
Частота с выхода схемы вычитания 13 делителя частоты секции / используется в качестве входной последовательности имлульсов для делителя частоты секции //, грулпа вентилей 14 которого управляется одноотсчетным циклическим преобразователем фаза-код 16, преобразующим в цараллельный цифровой код фазу бесконтактного сельсина в режиме фазовращателя, используемого в качестве оцеративного задатчика 17 соотношения скоростей секций // и /. Импульсы выборки этой группы вентилей вычитаются из входной последовательности импульсов делителя частоты секции //, а результирующая частота подается на вход аналогичного делителя частоты секции /// и т. д. Такое соединение делителей частоты обеспечивает одновременное пролорциональное изменение выходных частот делителей частоты всех последующих секций в зависимости от положения задатчика 17 скорости мащины (секции /) и задатчика 17 соотнощения скоростей данной и .предыдущей секции.
Группа вентилей 15 каждого делителя частоты, управляемых посредством переключателя 18, используется для дополнительной индивидуальной подстройки выходной частоты делителей. Выходная частота делителя частоты и частота с выхода группы вентилей 15 цодаются в схему сложения 2, результирующая частота с выхода которой подается одновременно в преобразователь 3 импульсов в фазовый сдвиг, пропорциональный числу имцульсов, и в преобразоваль 4 импульсов в напряжение, пропорциональное частоте имлульсов. Преобразователь 3 является источником сигналов текущего задания по положению, преобразователь 4-источником сигналов задания по скорости. Следовательно, для калсдой секции система содержит два датчика обратной связи:/по положению и скорости.
положению используется бесконтактный сельсин в фазовращения. Трехфазное опорное напряжение частотой fo для питания датчиков 6 и задатчиков 17 скорости (соотнощения скоростей) долучается путем деления частоты /з.г задающего генератора 12 в доцолнительном делителе частоты 19 с последующим форМированием сдвигов фаз -120°, -240° относительно фазы напряжения основного сигнала опорной частоты, получаемого с делителя частоты 19 посредством формирователя 20 сдвигов фаз. Напряжение на выходе датчика 6, соединенного через редуктор с валом приводного электродвигателя 11 секции // (при вращении вала), имеет частоту /о ± А/д. причем Д/д представляет собой девиацию выходной частоты сельсина (отклонение от опорной частоты /о). При этом фаза сигнала обратной связи характеризует угловое лоложение вала электродвигателя данной скорости, а величина Д/д - его Скорость. Направление вращения электродвигателя определяется знаком «±. Скорость электродвигателя каждой секции
в интегральной части контура управления задается с выхода преобразователя 3 в виде напряжения Us частотой fo ± Д/з где Д/з характеризует изменение фазы этого напряжения в единицу времени относительно фазы основного сигнала опорной частоты /о- Величина Д/з пропорциональна установленной скорости, а знак определяет направление вращения. При этом фаза этого напряжения характеризует текущее значение задания по
положению.
Сигнал задания ло положению сравнивается с сигналом обратной связи в фазово.м дискриминаторе 5, налряжение на выходе которого пропорционально разности фаз входных сигналов, благодаря чему в устано1вивщемся режиме обеспечивается астатическое поддержание заданной скорости при Д/д Д/з. Напряжение постоянного тока с выхода фазового дискриминатора 5 подается через схему сложения 7 в силовой преобразователь 10, управляющий скоростью электродвигателя данной секции.
В лропорциональной части контура управления в качестве датчика 5 обратной связи
по скорости используется тахогенератор, сочлененный с электродвигателем секции //. Напряжение с выхода датчика 9 характеризует фактическую скорость электродвигателя, напряжение f/з с выхода преобразователя 4--заданную скорость. Сигнал задания по скорости сравнивается с сигналом обратной связи в блоке сравнения 8, результирующий сигнал в виде напряжения с выхода которого подается через схему сложения 7 в
силовой преобразователь 10, управляющий скоростью электродвигателя секции //.
делательных машин, включающая задающий генератор стабильной частоты, делители частоты, вентили для выборки импульсов, формирователь импульсов, два сельсина, преобразователь фаза-код, фазовый дискриминатор, схемы сложения и вычитания, отличающаяся тем, ЧТО, с -целью ловыщения быстродействия, выход схемы сложения подключен параллельно к преобразователям импульсов в фазовый сдвиг и в напряжение, причем выход первого преобразователя подключен к фазовому дискриминатору, к которому также подключен первый сельсин, выход второго преобразователя соединен с блоком сравнения, на .вход которого подключен второй сельсин, а фазовый дискриминатор и блок сравнения через схему сложения и силовой преобразователь подключены к электродвигателю секции.
10
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ | 1971 |
|
SU301397A1 |
| Устройство для программного управления электроприводом | 1980 |
|
SU1198458A1 |
| ФАЗОИМПУЛЬСНЫЙ ДАТЧИК | 1973 |
|
SU407245A1 |
| Электропривод | 1985 |
|
SU1275726A1 |
| Следящий привод | 1977 |
|
SU684507A2 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1248068A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| Устройство для измерения перемещений | 1989 |
|
SU1717943A1 |
| Массовый расходомер | 1975 |
|
SU559114A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |