Изобретение относится к измерительной технике и может быть использовано для контроля параметров вращения вала, например, при задании режима рабрты гидроагрегата.
Цель изобретения - упрощение и повышение точности и быстродействия.
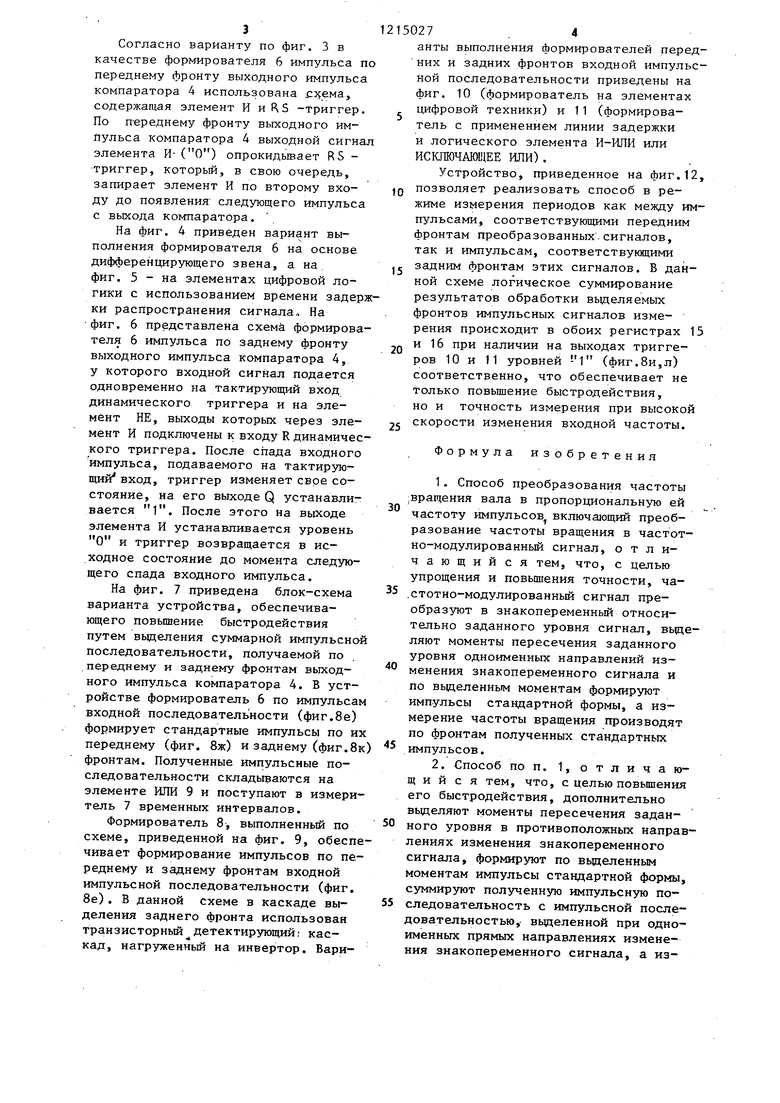
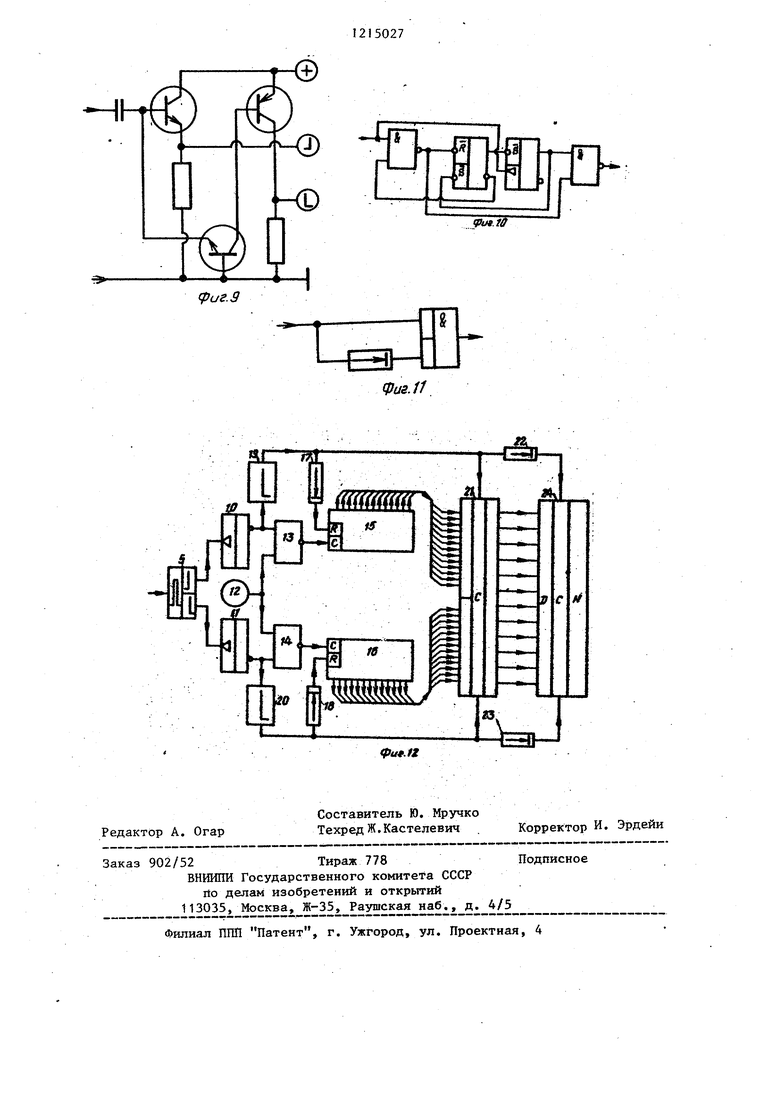
На фиг. 1 приведена блок-схема устройства для осуществления предлагаемого способа в режиме выделения одноименных направлений изменения знакопеременного сигнала; на фиг.2- временные диаграммы его работы; на фиг. 3 - вариант схемы преобразования частотно-модулированного сиг- нала датчика при вьщелении одноименных направлений изменения знакопеременного сигнала на фиг. 4 и 5 - . варианты схем формирователей импульсов по передним фронтам входных им- пульсов; на фиг. 6 - вариант,схемы формирователя импульсов по заднему фронту входных импульсов; на фиг.7 - блок-схема устройства для осуществления способа в режиме вьщеления разно именных направлений изменения знакопеременного сигнала; на фиг. 8 - временные диаграммы работы устройства по фиг. 7J на фиг. 9 - вариант схемы формирования импульсов по переднему и заднему фронтам входного импульса; на фиг. 10 и 11 - схемы формирователей переднего и заднего фронтов с объединенными выходами; на фиг. 12 - схема логического сумми рования результатов.
Устройство (фиг. 1) содержит периодический реактивньй, например, ем- костньй датчик 1, включенньй в резонансную систему автогенераторного преобразования (АПТ) 2, выход которого подключен к входу частотного детектора 3. Выход частотного детектора 3 подключен к одному из входов компаратора 4, второй вход которого связан с источником 5 опорного напряжения, величина которого в частном случае может быть равна.кулю. Выход компаратора 4 подключен-к схеме формирователя 6 импульса по переднему (зад нему) фронту выходного импульса компаратора. Выход формирователя 6 соеди нен с входом измерительного блока 7.
Согласно варианту, представленном на фиг. 7 в устройстве выход компара тора 4 соединен через формирователь 8 импульсов по переднему и заднему фронтам выходного импульса компаратора и элемент ИЛИ 9 к измерительному блоку.
, Схе.ма логического суммирования временных интервалов содержит два динамических триггера 10 и 11, выходы которых связаны с управляющими входами коммутатора генератора 12 эталонных импульсов. Коммутатор вьтолнен на элементах И 13 и 14, выходы которых подключены к счетным входам С суммирующих счетчиков 15 и 16, входы R которых через элементы задержки 17 и 18, а также через дополнительные формирователи 19 и 20 задних фронтов сигналов подключены к выходам триггеров 10 и 11. Выходы формирователей 19 и 20 подключены непосредственно к тактирующим входам группового мультиплексора 21 и через элементы задержки 22 и 23 к таким же входам преобразователя 24 периода импульсов в частоту вращения, причем входы С как мультиплексора, так и преобразователя организованы по схеме ИЛИ, а связь разрядных выходов регистров 15 и 16 с информационными входами D преобразователя 24 осуществлена посредством этого мультиплексора.
Предлагаемое устройство работает следующим образом.
Вращение вала вызывает периодичес ;кое изменение параметра датчика 1, например его емкости. Данное изменение параметра вызывает частичную модуляцию выходного сигнала АПТ 2 (фиг. 2а), который преобразуется в знакопеременное напряжение при помощи частотного детектора 3 (фиг.2а) Компаратор 4 сравнивает текущее значение выходного напряжения частотного детектора 3 с опорным напряжением источника 5 (в данном случае оно равно нулю) и формирует импульсный сигнал (фиг. 2в). Формирователь 6 в схеме по фиг. 1 обеспечивает формирование стандартных импульсов по переднему фронту выходного сигнала компаратора 4. Измерение временного интервала, пропорционального частоте вращения, осуществляется измерительным блоком 7 по передним фронтам выходных импульсов формирователя 6. Как следует из временных диа- грамм, приведенных на фиг. 2, случаи 1J и Ш, временной дрейф средней частоты частотно-модулированного выход- наго сигнала АГП не вызьшает изменения контролируемого периода Т.
3
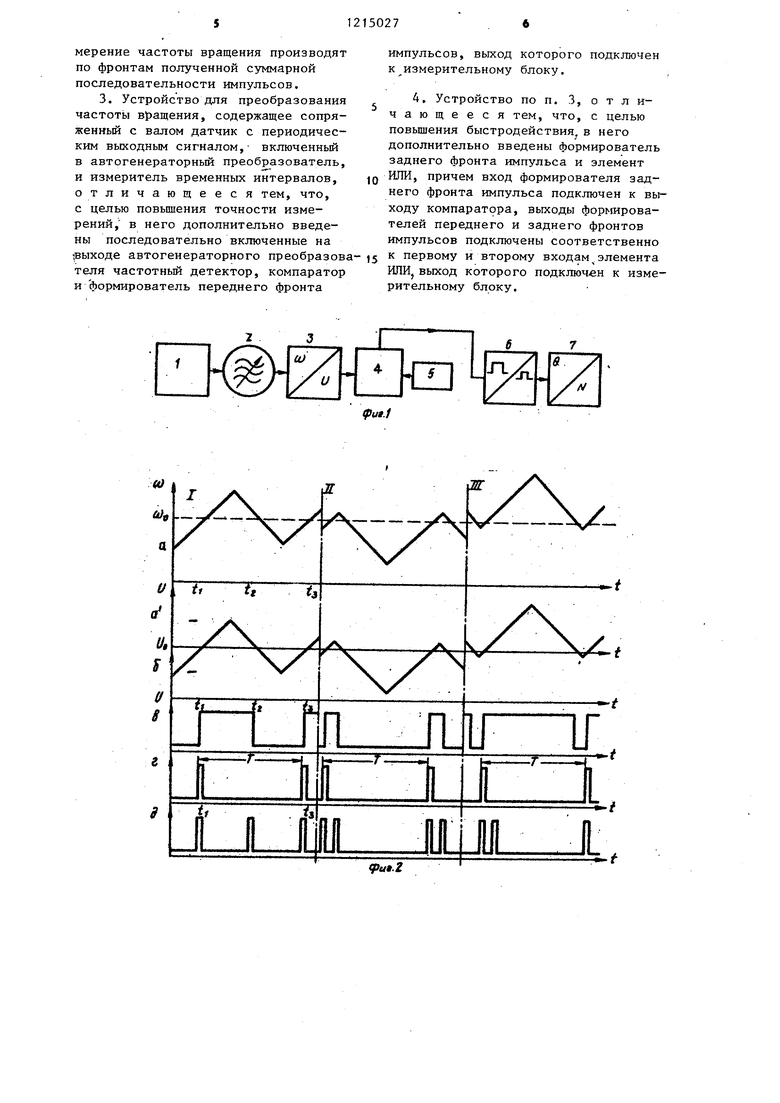
Согласно варианту по фиг. 3 в качестве формирователя 6 импульса по переднему фронту выходного импульса компаратора 4 использована , содержащая элемент И иКЗ -триггер. По п-ереднему фронту выходного импульса компаратора 4 выходной сигнал элемента И- (О) опрокидьгоает RS - триггер, который, в свою очередь, запирает элемент И по второму входу до появления следующего импульса с выхода компаратора.
На фиг. 4 приведен вариант выполнения формирователя 6 на основе дифференцирующего звена, а на фиг. 5 - на элементах цифровой логики с использованием времени задержки распространения сигнала. На фиг. 6 представлена схема формирователя 6 импульса по заднему фронту выходного импульса компаратора 4, у которого входной сигнал подается одновременно на тактирующий вход динамического триггера и на элемент НЕ, выходы которых через элемент И подключены к входу R динамического триггера. После спада входного импульса, подаваемого на тактирующий вход, триггер изменяет свое состояние, на его выходе Q устанавливается 1. После этого на выходе элемента И устанавливается уровень О и триггер возвращается в исходное состояние до момента следующего спада входного импульса.
На фиг. 7 приведена блок-схема варианта устройства, обеспечивающего повьппение быстродействия путем вьделения суммарной импульсной последовательности, получаемой по переднему и заднему фронтам выходного импульса компаратора 4. В устройстве формирователь 6 по импульсам входной последовательности (фиг.8е) формирует стандартные импульсы по их переднему (фиг. 8ж) и заднему (фиг.вк фронтам. Полученные импульсные последовательности складываются на элементе ИЛИ 9 и поступают в измеритель 7 временных интервалов.
Формирователь 8, выполненный по схеме, приведенной на фиг. 9, обеспечивает формирование импульсов по переднему и заднему фронтам входной импульсной последовательности (фиг. 8е). В данной схеме в каскаде выделения заднего фронта использован транзисторный детектирующий; каскад, нагруженный на инвертор. Вари15027 . 4
анты выполнения формирователей перед- них и задних фронтов входной импульсной последовательности приведены на фиг. 10 (формирователь на элементах цифровой техники) и 11 (формирователь с применением линии задержки и логического элемента И-ИЛИ или ИСКЛЮЧАМЦЕЕ ИЛИ) .
Устройство, приведенное на фиг.12,
Q позволяет реализовать способ в режиме измерения периодов как между импульсами, соответствующими передним фронтам преобразованных.сигналов, так и импульсам, соответствующими задним фронтам этих сигналов. В данной схеме логическое суммирование результатов обработки выделяемых фронтов импульсных сигналов измерения происходит в обоих регистрах 15 и 16 при наличии на выходах триггеров 10 и 11 уровней 1 (фиг.8и,л) соответственно, что обеспечивает не только повьшение быстродействия, но и точность измерения при высокой
25 скорости изменения входной частоты.
Формула изобретения
15
20
1.Способ преобразования частоты вращения вала в пропорциональную ей частоту импульсов, включающий преобразование частоты вращения в частот- но-модулированньй сигнал, отличающийся тем, что, с целью упрощения и повьшения точности, ча.стотно-модулированный сигнал преобразуют в знакопеременньй относительно заданного уровня сигнал, вьде- ляют моменты пересечения заданного уровня одноименных направлений изменения знакопеременного сигнала и по вьщеленным моментам формируют импульсы стандартной формы, а измерение частоты вращения производят по фронтам полученных стандартных
импульсов.
2.Способ по п. 1, отличающийся тем, что, с целью повышения его быстродействия, дополнительно вьщеляют моменты пересечения заданного уровня в противоположных направлениях изменения знакопеременного сигнала, формируют по вьделенным моментам импульсы стандартной формы, суммируют полученную импульсную последовательность с импульсной последовательностью, вьделенной при одноименных прямых направлениях изменения знакопеременного сигнала, а измерение частоты вращения производят по фронтам полученной суммарной последовательности импульсов.
3. Устройство для преобразования частоты вращения, содержащее сопряженный с валом датчик с периодическим выходным сигналом,- включенный в автогенераторный преобразователь, и измеритель временных интервалов, отличающееся тем, что, с целью повьшения точности измерений, в него дополнительно введены последовательно включенные на выходе автогенераторного преобразовтеля частотный детектор, компаратор и формирователь переднего фронта
импульсов, выход которого подключен к измерительному блоку.
4, Устройство по п. 3, отличающееся тем, что, с целью повьшения быстродействия, в него дополнительно введены формирователь заднего фронта импульса и элемент
ИЛИ, причем вход формирователя заднего фронта импульса подключен к выходу компаратора, выходы формирователей переднего и заднего фронтов импульсов подключены соответственно
к первому и второму входам элемента ИПИ выход которого подключен к измерительному блоку.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ИНТЕРВАЛЫ ВРЕМЕНИ | 2014 |
|
RU2552605C1 |
| Способ многоканального широтно-импульсного преобразования аналогового сигнала и устройство для его осуществления | 1985 |
|
SU1352635A1 |
| Цифровой фильтр | 1983 |
|
SU1169146A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ | 1995 |
|
RU2116694C1 |
| Дельта-модулятор | 1990 |
|
SU1718383A1 |
| Калибратор девиации частоты частотно-модулированных сигналов | 1987 |
|
SU1511703A1 |
| Компаратор | 1977 |
|
SU640247A1 |
| УСТРОЙСТВО для ДИСКРЕТНОЙ ДЕМОДУЛЯЦИИ ШИРОТНО-МОДУЛИРОВАННЫХ ИМПУЛЬСОВ | 1972 |
|
SU333692A1 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ | 1991 |
|
RU2031445C1 |
| Многофазный импульсный стабилизатор | 1984 |
|
SU1196830A1 |
Способ и устройство для его осуществления относятся к измерительной технике и могут использоваться для контроля параметров вращения вала, например, при задании режима работы гидроагрегата. Цель изобретения - повышение точности и.быстродействия . Частотно-модулированный сигнал преобразуют в знакопеременный относительно заданного уровня сигнал, вьделяют моменты пересечения заданного уровня одноименных направлений изменения знакопеременного сигнала и по вьделенным моментам формируют импульсы стандартной формы, а измерение частоты вращения производят по фронтам полученных стандартных импульсов. В описании представлены варианты схемы . преобразования частотно-модулированного сигнала датчика по переднему и заднему фронтам входного импульса. 2 с.п.ф-лы, 2 з.п.ф-лы, 12 ил. % (Л ю СП о ю 
.Z
Im:.
фиг.
фи«.в
фиг. 5
С. 4
n
JL
фмЛ
и
. 4Г
и
t
(риг.З
t
D
fpue. IS
r
I
c
Редактор A. Orap
Составитель Ю. Мручко
Техред Ж.Кастелевич Корректор И. Эрдейи
Заказ 902/52Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
По делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
Фив.11,
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВРАЩЕНИЯ ВАЛА | 0 |
|
SU353200A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения частоты вращения вала | 1982 |
|
SU1076834A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
