1
Изобретение относится к радиолокации и может использоваться для определения местоположения вертолета относительно радиомаяка.
Известно устройство для определения углового положения вертолета относительно радиомаяка, содержащее два приемных канала, каждый из которых включает последовательно соединенные приемную антенну, предварительный усилитель, смеситель, к в-торому входу которого подключен местный генератор, и полосовой фильтр, при этом выходы полосовых фильтров через последовательно соединенные усилитель промежуточной частоты и квадратичный детектор подключены к входу фильтра разностной частоты, а выходы местных генераторов соединены с входами преобразователя частоты, причем одна из приемных антенн расположена на одной из лопастей несущего винта вертолета, а другая - на
({«озеляже (11.
(
Однако известное устройство позволяет определить только одну угловую информацию углового положения вертолета относительно маяка, что снижает .точность определения местоположения.
Цель изобретения - повышение точности определения местоположения вертолета относительно радиомаяка.
Для этого в устройство для определения углового положения вертолета относительно радиомаяка, содержащее два приемных канала, каждый из которых включает последовательно соединенные приемную антенну, предварительный усилитель, смеситель, к второму входу которого подключен местный генератор, и полосовой фильтр, при этом выходы полосовых фильтров
5 через последовательно соединенные усилитель промежуточной частоты и квадратичный детектор подключены к входу фильтра разностной частоты, а выходы местных генераторов соединены
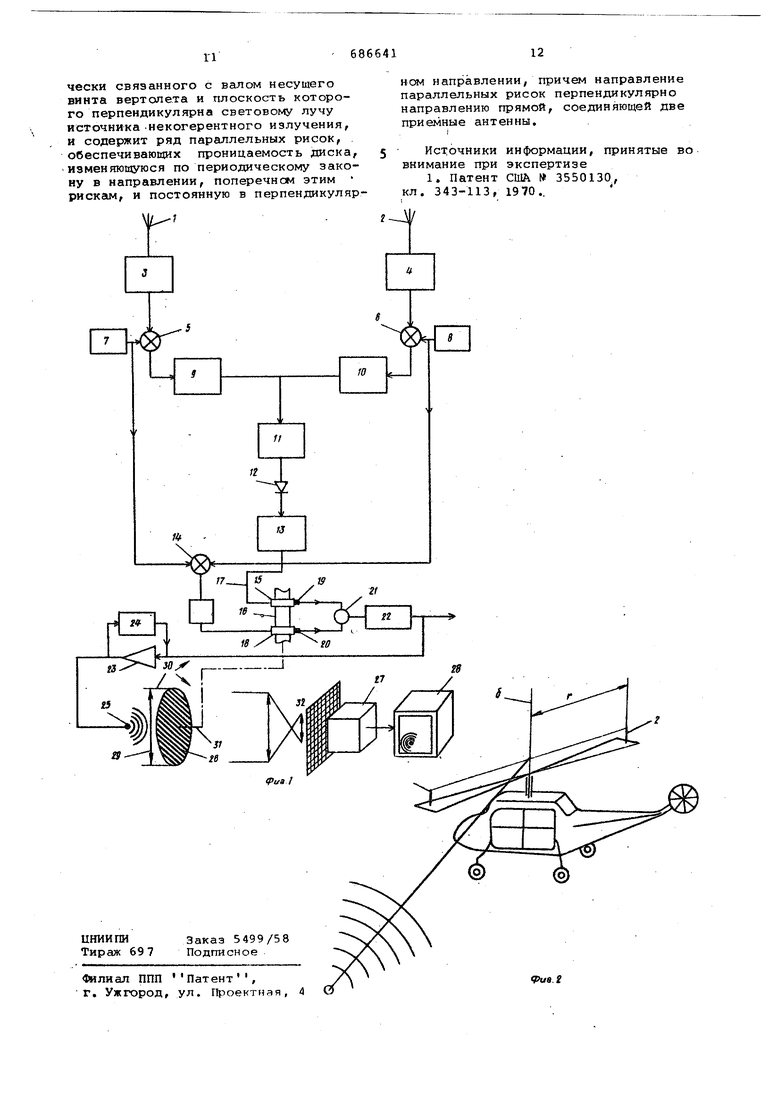
0 с входами преобразователя частоты, причем одна из приемных антенн расположена на одной из лопастей несущего винта вертолета, выход фильтра разностнрй частоты соединен с одним то5копроводящим кольцом. Братающимся вместе с валсяи несущего винта вертолета, а выход преобразователя частоты через узкополосный фильтр соединен с другим токопроводящим кольцом, выходы токопроводящих колец через скользящие контакты соединены с входами нелинейного элемента, например диода, выход которого через полосовой фильтр соединен с входом усилите ля с автоматической регулировкой усиления, выход которого соединен с источником когерентного излучения, оптически связанного с модулятором света и детектором-интегратором, выход которого соединен с блоком индикации, вторая приемная антенна расположена на другой лопасти несущего винта вертолета, диаметрально первой приемной антенне, а модулятор света выполнен в виде диска, механически связанного с валом несущего винта вертолета и плоскость которого перпендикулярна световому лучу источника некогерентного излучения и содержит ряд параллельных рисок, обеспечивающих проницаемость диска, изменяющуюся по периодическому закону в направлении, поперечном этим рискам и постоянную в перпендикулярном направлении, причем направление парал. лельных рисок перпендикулярно направ лению прямой, соединяющей две приемные антенны. На фиг, 1 показана структурная электрическая схема предложенного устройства на фиг, 2 - схема вертолета, оборудованногоантеннами. Устройство (фиг, 1) содержит два приемных канала, каждый из которых включает последовательно соединенные приемную антенну 1, 2, предварительный усилитель 3, 4, смеситель 5, 6, к второму входу которогр подключен .местный генератор 7, 8 и полосовой .фильтр 9, 10, при этом выходы полосовых фильтров 9 и 10 через последо вательно соединенные усилитель промежуточной частоты (УПЧ) 11 и квадра тичный детектор 12 подключены к вхо,-(у фильтра 13 разностной частоты А ВЫХОДЫ местных генераторов 7 и 8 соединены с входами преобразователя U4 частоты, выход фильтра 13 соединен с токопроводящим кольце 15, вра ;щаощимся вместе с валом 16 несущего винта вертолета, а выход преобЕ)азоватепя 14 через узкополосный фильтр 17 соединен с токопроводящим кольцо 18, Щ1ХОДЫ токопроводящих колец 15 и 18через скользящие контакты 19 и 20 сое шнены с входами нелинейного элемента, например диода 21,.выход которого через полосовой фильтр 22 соединен с входом усилителя 23 с ав томатической регулировкой усиления 24, шлход усилителя 23 соединен с и точником 25 некогерентногр излучения, оптически связанного с модулят ром 26 света и детектором-интеграто рсм 27f выход которого соединен с блоком индикации 28, Модулятор 26 света выполнен в видиска, механически связанного с лом 16 несущего винта вертолета, оскость которого перпендикулярна етовому лучу источника 25 некогерентго излучения, и содержит ряд паллельных рисок, обеспечивающих процаемость диска, изменяющуюся по риодическому закону в направлении, перечном этим рискам, и постоянную перпендикулярном направлении. Устройство работает следующим обзом, Наземный передатчик радиомаяка А известным местом расположения излует электромагнитные волны сверхвыкой частоты, и сигнал, излученный яксял и принятый антенной 1, имеет рму a,(t)cc5Ht-|)-VJt)4ii , (1) i е CSj,- произведение закона амплитуды сигнала, излученного маяком, и закона амплитуды, вытекающего из направленности антенны 1; t - время; ЧО - угловая частота, соответствующая частоте энергии, излучаемой маяксм; г - длина пути, прейденного излучаемой энергией от маяка до центра вращения, который является местом .пересечения прямой, соединяющей антенны 1 и 2 и оси вращения о ; с - скорость света/ 1 угол по отиошеиида к эталонной фазе, Vl выводится по формуле ;(t) Sl«tO« -C03(at-V) , .(2) е R - длина радиуса вращения антенны 1 Д - длина волны, соответствующ я частоте передатчика; ф - угол места, под которьлм располезен маяк по отношению к плоскости вращения лопастей;S. угловая скорость лопастей; V - угол между пряьюй, соединяей центр вращения с маяком А, и сфным направлением вертолета, продящим через центр вращения иаприр продольное направление корпуса ртолета, величины 0 и у .являются, ким образом, сферическими коордитами,. Для аштенны 1 щэинятый сигнал выжается формулой 0.b(t-f)).4fiJ + Vj (3 при эт ом фаза по отношению к опорной Vf(t) получается из формулы yjt) Ц CX)i - мф t - V) . (4) где R JL - длина радиуса вращения антенны 2. Изменение знаков на противоположные, стоящих перед Vi(t) и V(t) в формулах (2) и (4) соответствует диаметрально противоположному положению антенн 1 и 2 на несущем винте образованном обеими лопастями верто лета,,. Сигналы, принятые соответственно антеннами 1 , поступают на предва рительные усилители 3 и 4, расположенные на лопастях вертолета. Они не сут также местные генераторы 7 и 8, вырабатывающие энергию соответственно с частотой и,, с фазами Ц, и по отношению к исходной соответст венно. Сигналы, поступающие с смесителя 5, на входы которого поступают сигналы, с одной стороны, с предвари тельного усилителя 3, и с другой сто роны, с местного генератора 7, прохо дят полосовой фильтр 9, настроенный на разностную частоту. Точно также, сигналы со смесителя 6, на входы кокоторого поступают сигналы от предварительного усилителя 4 и местного генератора 8, соответственно проходят через полосовой фильтр 10, настроенный на разностную частсЯ-у. Выходы фильтров 9 и 10 вместе подключены к входу усилителя 11 промежуточной частоты. Сигналы, являющиеся результатом смешивания сигналов, прошедших через фильтры 9 и 10, посл.е усиления подаются вместе через усили тель 11 на квадратичный элемент, например детектор 12, который и производит умножение. После детектора 12 сигналы проходят через фильтр 13, .настроенный на частоту, UO.I . jOt - ио г полоса пропускания которого имеет достаточную ширину, чтобы пропустить максимальное значение фазовой модуляции, поступающей как от одной, так ;и от другой антенны 1 и 2. Выход фильтра 13 соединен с токопроводяадим кольцом 15, вращающимся с валом 16, поддерживающим несущий : винт, с кольцом 15 совместно работае скользящий контакт 19, который не является частью вращающегося комплекса. Сигнал S(t) , являющийся результатом квадратичного детектирования детектором 12 и фильтрации фильт ром 13, имеет вид 6(f) |:aiVt-«S 5H - -2VJ), (5) где { соответствуетпути i среди мно жества путей, чтобы предусмотреть случай, когда энергия, излученная маяком а, доходит до антенн 1, 2 по множеству путей, в таком случае пемн ог он апр авл енредача является ной , Выходы местных генераторов 7 и 8 соединены, кроме того, с двумя входами преобразователя 14, выход которого соединен с фильтром 17 с узкой полосой пропускания, настроенным на частоту ( . Фильтр 17 соединен с токопроводящим кольцом 18, являющим ся частью вращающегося вала 16, с которым совместно работает скользящий контакт 20, не являющийся частью вр ащающег ося компл екс а. Сигнал г (t), полученный на скользящем контакте 20, имеет вид h(t)(oot((6) Сигналы 3(t) и г (t) умножаются в нелинейном элементе, нгшример диоде 21, выход которого соединен с полосовым фильтром 22, последний не пропускает его гармонику . Сигнгш на выходе полосового фильтра 22 имеет вид i()of(t-)to6rfr4t 24i(t) (7) После того, как фильтр 22 уберет несущую частоту 2 ouj сигнал S(t) представляет собой сигнал с фазовсЛ модуляцией с нулевой несущей частотой. С выхода фильтра 22 сигнал 5(t) поступает на усилитель 23 с автоматическсй регулировкой усиления 24, благодаря которой сигнал на выходе усилителя 23 имеет постоянную среднюю пиковую величину, близкую к постоянней выбранной величине. Усиленный ток на выходе усилителя 23 СЛУЖИТ для питания источника 25 некогерентного излучения, интенсивность излучения которого пропорциональна величине питающего тока,Благодаря автоматической регулировке усиления, напряжение, приложенное к , источнику 25, никогда не бывает отрицательным, а постоянный уровень не слишком превосходит среднюю квадратичную величину сигнала, Источник 25 некогерентного излучения расположен в фокусе линзы 29, дающей параллельный пучок лучей 30, направленных к модулятору 26, выполненному в виде диска, смонтированного вращающимся на оси 31, модулятор 26 представляет собой диск с переменной проницаемостью, зависящей от периодического закона в направлении, показанном стрелкой х и диск с постоянной проницаемостью в перпендикулярном направлении, показанном стрелкой у. Таким образом.
он вырабатывает последовательность
линий
параллельных
Диск вращается вокруг оси 31 благодаря механической связи, между вапсм 16 и валом, несущим диск, с той же скоростью, что и несущий винт вращается вокруг оси б, а угол установки диска на его валу таков, что направление параллельных линий перпендакулярно направлению прямой, соединяющей антенны 1 и 2,
Диск может быть получен из интерференционных полос монохроматического света.
Закон проницаемости диска выглядит следуюгдам образом
TUtPv)-l t06r4,(5lt-V/.) ,(8)
гдеЧ - исходная фаза;
РО и Vo - полярные координаты
точки диска в системе координат, с точкой отсчета в центре диска;
Д - длина пространственной волны, соответствугадая синусоидальному закону проницаемости; и - угловая скорость диска, . равная угловой скорости лопастей несущего винта,
Если J- сила света, вырабатываемого источником некогерентного излучения и 5С - количество света, поступающего из названного источника после прохссясдения через диск, то имеем
,;
следовательно
(t)X(10)
Таким образом
№S(t)l l+CW fo - №5{St-Vo)} li)
Эта формула дает количество света в точке пространства, расположенной за диском и полярными координатами )Я, Ve.
Свет луча, переданный диском, передается оптической системой 32 на , детектор-интегратор 27, который соединен с блоком индикации 28 типа осйдоскопа с экраном.
Произведение двух биномов формулы (11) является суммой четырех мно- житея Н1, записанных последовательно
i.-t(U)
а. wsCf S cosCftt-v.) (13)
3,-5Wfl4)
4. SWCosIvfc- .(о) (5)
Во время интегрирования, осуществленного детектором-интегратором 27, в течение времени от (t - Т) до t интегрирование множителя дает Т; интегрирование второго множителя :приводит к нулевому результату, так jcax это интегрирование синусоидального сигнала,средияя величина которого равна нулю;интегрирование третьего множителя,которс 1у соответствует противопоставление синусоид,средняя величина KOTOi iiK равна нулю.
Следовательно, результатом интегрирования является
t ) 2Sifric05 4 }i(t).
принимая, что
y,(t) 2|Po((Qt-V.)
171
Фсфмула (16) может йлть разложена
),4t{t)-%(t)b t/ri.
HV«(b)H -v% J
4. t
(Ш.
(18)
Положение точки диска, дпредепенной Д и Vef в которой вращение диска освещенного светсж, исходящим от источника 25 некогерентного излучения, лишено временной модуляции, и при котором J и Ve являются решениями того или иного из двух групп следуюйшх уравнений
.a|R.
(19) .
Vo-V(f)S .
(20)
Диск дает бесконечное количество величин модуляции, по отношению к которым после обработки можно осу1аествить корреляцию фазошлх модуляций принятых сигналов.
Для решения, схютветствующего уравнению (19), интенсивность изображения яа экране блока индикации 28 для времени интегрирования Т имеет следукпцую величину
«САЛ)-Т-«. JJ 2ot(i-a)co3(f.-f,,)at (21)
t-T Это может быть записано ,,-,)jto( Л. -Т / - Л ИЛИ, назвав величиной интеграла, которая представляет собой энер гию сигнала в течение времени Т, вы ражения (21) и (22) имеют следующий множитель jifo,v,(r,-. Для другого решения, соответству щего формуле (20), соответствующая величина выражается jfp u/Fl r e K-чг,) W Двузначность взята для визуализа ции, соответствующей сигналу по уравнению (23), выбирая , ц, чтойл сигнал по уравнению (23) был максимальным, тогда как сигнал по уравнению (24) минимальный. Условие, относящееся к максимгипи зации, записывается С;0(Ч1-Чг- % ) - 1,(25) то есть ifo -О(26) Ч-о 1 - Условие, относящееся к максимали зации второго сигнала, записывается C,G(ifi- tfj4. vfo) 0(28) то ест ь Mt-MzL (29) Из уравнений (27) и (29) получаем ,4-0,(30) то есть «fo . подставляя в уравнение (27) , получа ем. ц. - vP : /г-1 тг - (31) Условие (31) выполняется при придании коаксиальному кабелю или друтому волноводу, соединяющему антенны 1 и 2 с усилителями 3 и 4, большей длины, чем коаксиальному кабелю или другому волноводу, соответствующему другой лопасти, В этих целях можно также предусмотреть другие сдвиги Фаз, осуществленные смесителями 5 и 6. Условие (30) выполняется при подходящем расположении оси вращения по отнсзшению к полосам на диске, Устройство позволяет получить на экране блока индикации изображение углового положения одного или нескольких маяков, излучения которялх принимаются устройством с вращающимися антеннами 1 и 2, Результат достигается, даже если скорость вращения лопастей не постоянна. Смешение сигналов, поступающих от двух диаметрально расположенных антенн с одинаковым расстоянием до оси, вызывает фазовую модуляцию, идентичную той, которая может быть получена при помощи единственной антенны с вдвое большим радиусом. Формула изобретения 1, Устройство для определения углового положения вертолета относительно радиомаяка, содержащее два приемных кангша, кгикдый из которых включает последовательно соединенные приемную антенну, предварительный усилитель, смеситель, к второму входу которого подключен местный генератор, и полосовой фильтр, при зтом выходы полосовых фильтров через последовательно соединенные усилитель промежуточной частоты и квадратичный детектор подключены к входу фильтра разностной частоты, а выходы местных генераторов соединены с входами преобразователя частоты, причем одна из приемных антенн расположена на одной из лопастей несущего винта вертолета, отличающееся тем, что, с целью повьвиения точности определения местоположения вертолета относительно радиомаяка, выход фильтра разностной частоты соединен с одним токопроводящим кольцом, вращающимся вместе с валом несущего винта вертолета, а выход преобразователя частоты через узкополосный фильтр соединен с другим токопроводящим кольцом, выходы токопроводящих колец через скользящие контакты соединены с входали нелинейного элемента, например диода, выход которого через полосо вой фильтр соединён с входом усилителя с автоматической регулировкой усиления, выход которого соединен с исТС5ЧНИКОМ некогерентного излучения, оптически связанного с модулятором света и детектором-интегратором, выход которого соединен с блоком индикации, 2,Устройство по п, 1, о т л и чающееся тем, что вторая приемная антенна расположена на другой лопасти несущего винта вертолета, диешетргльно первой приемной антенне, 3,Устройство поп, 1, отлиающееся тем, что модулятор света, выполнен в виде диска, механи

| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2004 |
|
RU2256939C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРИНАДЛЕЖНОСТИ НАЗЕМНОЙ ТЕХНИКИ И ВОЕННОСЛУЖАЩИХ К СТОРОНЕ-УЧАСТНИЦЕ ВОЕННЫХ ДЕЙСТВИЙ | 2010 |
|
RU2438143C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2012 |
|
RU2521456C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ПРЕПЯТСТВИЙ | 2005 |
|
RU2296344C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2002 |
|
RU2226479C2 |
| ВЕРТОЛЕТНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2010 |
|
RU2419991C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2254262C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2276038C1 |
| Многофункциональный вертолетный радиоэлектронный комплекс | 2019 |
|
RU2736344C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
