(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитометр с устройством компенсации магнитных помех от носителя | 1977 |
|
SU693319A1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 1998 |
|
RU2153682C1 |
| Устройство для измерения модуля вектора магнитной индукции | 1979 |
|
SU789944A1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2006 |
|
RU2316781C1 |
| Устройство для измерения вектора магнитной индукции | 1980 |
|
SU868655A1 |
| ФЕРРОЗОНДОВЫЙ АЭРОМАГНИТОМЕТР | 1991 |
|
RU2019860C1 |
| МОНОБЛОЧНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2382376C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2005 |
|
RU2302644C1 |
I
Изобретение относится к устройстваN для магнитных измерений и может быть использовано в навигации, для контроля положения транспортных средств в магнитном поле, а также при поисках и разведке полезных ископаемых.
Известны магнитометры для определения интенсивности и направления магнитного поля, содержащие ортогонально ориентированные магнитные зонды, усилительно-преобразовательные схемы и регистрирующий прибор
Недостатком этого устройства является низкая точность измерений модуля вектора магнитной индукции, основанных на сдвиге фазы возбуждающих магнитные зонды токов на угол 45 и последовательном включении измерительных обмоток зондов.
Наиболее близким по техническому решению к предлагаемому является устройство, содержащее компонентные магнитометры с ортогонально ориентированными магнитными зондами, катушками
обратной связи, усилительно-преобразовательными блоками и регистрирующий прибор 2. Для вычисления модуля вектора в этом устройстве используются термопреобразователь и коммутатор .
Однако в этом устройстве выходными лараметрами служит напряжение (или токи), в связи с чем для обработки результатов измерений с использованием ЦВМ или для ввода в современные навигационные системы требуется дополнительно преобразовать эти параметры в цифровой код модуля вектора и его направляющих косинусов.
Цель изобретения - повышение точности измерений.
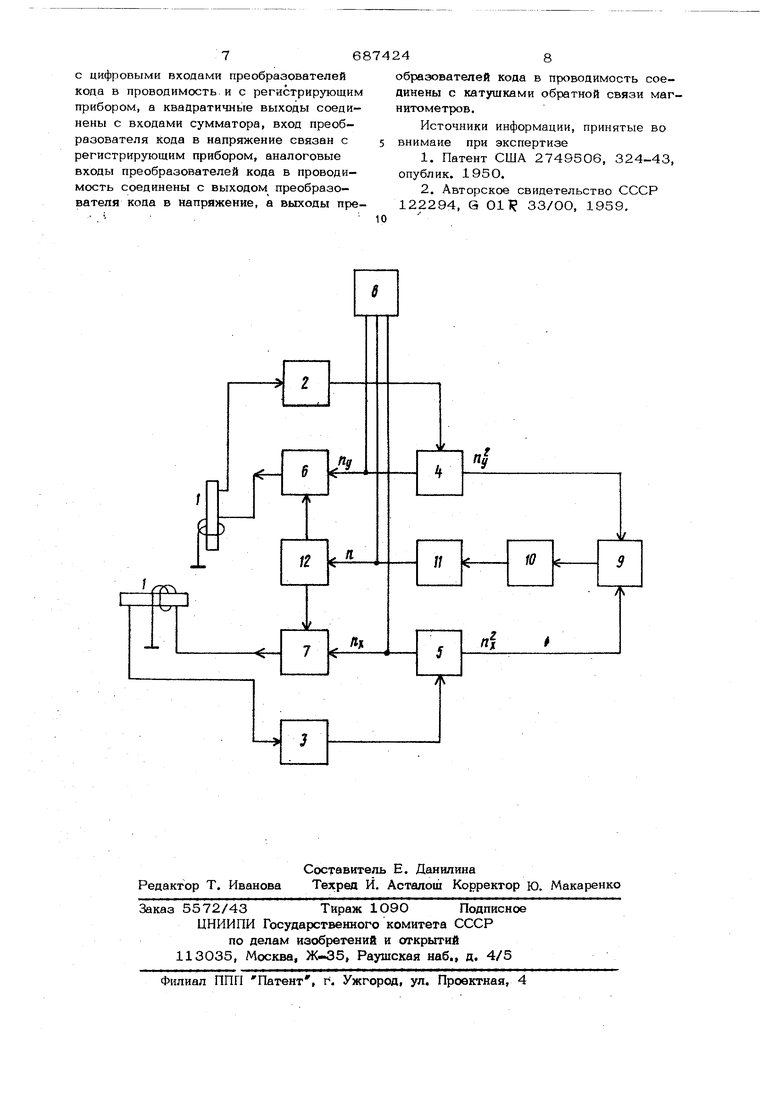
Для этого в предлагаемое устройство для измерения вектора магнитной индукции, содержащее компонентные магнитометры с ортогонально ориентированными магнитными зондами, катушками обратной связи, усилительно-преобразовательные блоки и регистрирующий прибор, введены цифровые интеграторы с линей3( ным и квадратичным выходами и преобразователи кода в пpoвoдимocfь по числу компонентных магнитометров, а также последовательно соединенные сумматор, разностный преобразователь, дополнительный цифровой интегратор и преобразователь кода в напряжение, причем входы цифровых интеграторов соединены с выходами усилительно-преобразовательных блоков, линейные выходы цифровых интеграторов соединены с цифровыми вхо .дами преобразователей кода в проводимость и с регистрирующим прибором, а квадратичные выходы соединены с входами сумматора, вход преобразователя ко- да в напряжение связан с регистрирующим прибором, аналоговые входы преобразователей кода в проводимость соединены с выходом преобразователя кода в напряжение, а выходы преобразователей кода в проводимость соединены с катушками обратной связи магнитометров. На чертеже приведена функциональная схема устройства для измерения вектора магнитной индукции, содержащая два компонентных магнитометра (случай измерения в плоскости). Магнитные зонды с катушками обратной связи ориентированы ортогонально (параллельно осям ОХ и ОУ прямоугольной системы координат) и соединены с усилительно-преобразовательными блоками 2 и 3. К выходам .усилительно-преобразовательных блоков 2 и 3 подключены входы цифровых интеграторов 4, 5 с линейным и квадратичным выходами. Цифровые интеграторы включают преобразователи напряжения в последователь ность импульсов и реверсивною схему интегрирования, построенные по известному принципу цифровой инкрементной обработк информации, содержащую два выхода, один из которых (линейный) содержит код сум мы числа импульсе , а другой (квадратич ный) - код квадрата той же суммы числа импульсов. Линейные выходы цифровых интеграторов 4 и 5 соединены с цифровыми входами преобразователей 6 и 7 кода в проводимость, управляющими проводимостью цепей катушек обратной связи феррозондов, и с регистрирующим прибором 8. Квадратичные выходы цифровых интеграторов 4 и 5 соединены с входами сумматора 9, а выход сумматора 9 - с разностным преобразователем 10. Последний служит для преобразования разности меж- 244 цу кодом, постуiiuBii.uiM с выхода сумматора, я заранее отданным числом в последовательность ампульсбв. Выход разностного преобразователя 10 соединен с входом дополнительно цифрового интегратора 11, а выход последнего связан с входом преобразователя 12 кода в напряжение и регистрирующим прибором 8. Выход преобра. зрвателя 12 соединен с аналоговыми входами преобразователей 6 и 7 кода в проводимость. Устройство работает следующим образом. На магнитный зонд 1, ориентированный в направлении оси ОХ, действует составляющая магнитной индукции у -bcosiS-, где fe - модуль вектора; с. - угол между вектором и осью Под действием этой составляющей на выходе усилительно-преобразовательного блока 2 возбуждается электоичес- кий сигнал соответствующей полярности. В результате интегрирования этого сигнала цифровыми интегратором 4 на одном его выходе накапливается код суммы числа импульсов п , а на другом выходе - код квадрата того же числа импульсов Пу Преобразователь 6 преобразует код Пу в проводимость катушки обратной связи. gx.x. Под действием напряжения Пу поступающего на аналоговый вход того же преобразователя с выхода преобразователя 12, в катушке обратной связи течет ток D-Ug --Uk,n, и образуется компенсирующее магнитное поле По мере накопления числа П возрастает величина индукции компенсирующего поля. В тот момент, когда индукция компенсирующего поля Ь«. сравняется с составляющей индукции измеряемого поля Ъ , сигнал на выходе усилительнопреобразовательного блока 2 станет равен нулю и дальнейшее накопление числа прекратится. При этом, значение 5 n определяется равенством Ь или с учетом зависимости (3) V IJ-V В сумматоре 9 код с квадратичного выхода этого же цифрового интегратора суммируется с аналогичным сигналом с выхода второго цифрового интегратора и на выходе сумматора 9 образуется код числа п,) -(5) Этот код поступает на вход разност ного преобразователя 1О, где преобраз ется в последовательность импульсов, число которых равно разности между числом (п + Пг; ), поступившим на ч ч, его вход и постоянным числом , Последовательность импульсов с выхода разностного преобразователя 10 интегрируется дополнительным цифровым интегратором 11, на выходе которого накапливается код числа п , преобразуе мый далее преобразователем 12 XJ Кд. m(6) По мере накопления кода ( ) будет изменяться напряжение U , поступающее на аналоговые входы преобразо вателей 6 кода в проводимость. Одновр менно изменяются коды чисел Пу поскольку равновесие в цепи катушки о ратной связи феррозонда определяется зависимостью (4). Накопление числа прекращается в тот момент, когда код числа, поступившего на вход разностног преобразователя 10, сравняется с кодо постоянного числа kt; П + П - k у U 3 При последующем изменении вектора магнитной индукции или при повороте магнитных зондов значения П, будут изменяться, однако при всех эти изменениях после установления равнове сия измерительной схемы коды чисел устанавливаются в соответствии с зави симостями (4), (5), (6) и (7). Используя эти зависмости , нетруд но получить выражения для чисел п П и Пи . . У k,kjk,k4 - k k kjk -cosc k kjkjL ; (9) ..k. . у(10) Таким образом, регистрируемый код п с точностью до постоянных множителей пропорционален модулю вектора магнитной индукции, а коды tijf и пропорциональны направляющим косинусам вектора. Аналогичным образом строится схема устройства для измерений вектора магнитной индукции в пространстве с использованием трех компонентных магнитометров, ориентированных параллельно осям ОХ, ОУ и О2 ортогональной системы координат. Непосредственная регистрация кодов модуля и направляющих косинусов обеспечивает возможность прямого подключения устройства к бортовым ЦВМ, навигационным системам, телеметрическим каналам связи и системам следящего приводы с цифровым управлением без применения дополнительных аналого-цифровых преобразователей и выполнения ряда вычислений. Исключаются погрешности измерений, обусловленные наличием термопреобразователей и коммутатора. Возрастает точность измерений. Формула изобретения Устройство для измерения вектора магнитной индукции, содержащее компонентные магнитометры с ортогонально ориентированными магнитными зондами, катушками обратной связи,-усилительнопреобразовательные блоки и регистрирующий прибор, отличающееся тем, что, с целью повышения точности измерений, в него введены цифровьге и 1тег аторы с линейным и квадратичным выходами и преобразователи кода в проводимость по числу компонентных магнитометров, а также последовательно соединенные сумматор, разностный преобразователь, дополнительный цифровой интегратор и преобразователь кода в напряжение, причем входы и1фровых интеграторов соединены с выходами усилительнопреобразовательных блоков, линейные выходы цифровых интеграторов соединены с цифровыми входами преобразователей кода в проводимость и с регистрирующим прибором, а квадратичные выходы соединены с входами сумматора, вход преобразователя кода в напряжение связан с регистрирующим прибором, аналоговые входы преобразователей кода в проводимость соединены с выходом преобразователя кода в напряжение, а выходы пре образователей кода в проводимость соединены с катушками обратной связи магнитометров. Источники информации, принятые во внимаие при экспертизе 1.Патент США 2748506, 324-43, опублик. 195 о. 2.Авторское свидетельство СССР 122294, е 011 ЗЗ/ОО, 1959,
