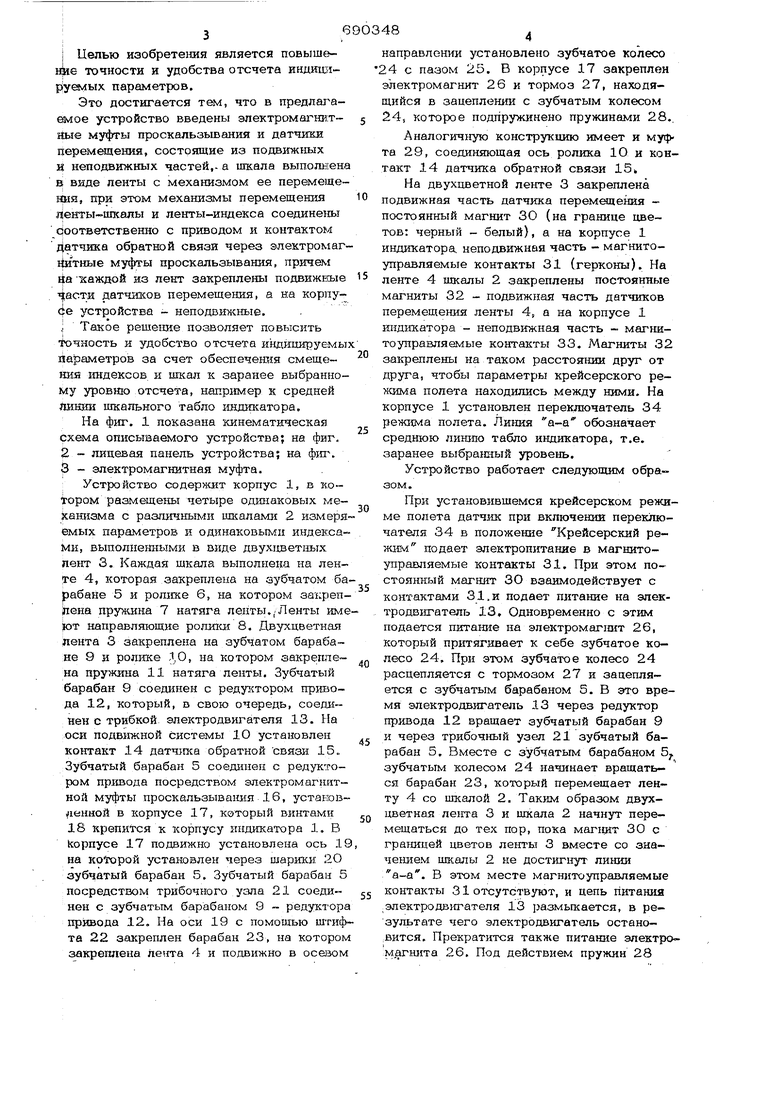
- I / i- ;- Изобретение относится к области прщ боростроенид и может быть испряь-зоваио при контроле параметров различшлх агре гатов Н устройств, преимушествешю на летбтепьаых аппаратах. Известен индикатор l , сод;ержапшй для каждого параметра гибкуки двзшяаетгную ленту, лентопротяжный механизм с пр шодом от двигателя и неподвижную вертикальную шкалу. Недостатком этих индикаторЬв является невысокая точность отсчета показаний, например, при установивш€а«{ся рет/кЯ ме полета летательного аппарата разброса отсчетных индексов шкал на различных уровнях друг относз пгельно друга. . Наиболее близкик к изобретению по технической сущности и достигаемому ре аультату является индикаторное устройство 2, предназначенное для инди ка1ШИ нескольких параметров и содержащее корпус, внутри которого для каждого пар«л«ет ра установлены вокала и двухцветная лен та-индекс с механизмом ее перемещений, кинематически связанным с приводом и контактом датчика обратной связи. Недостатком этого инДихатора 5ввляе1 ся то, что показания шкал контроля параметров находятся на разшлх овнйх, чгё приводит к увеличению времени восприятия информапин, уменьшению точности отсчета, утрмлйемоЬти оператора при установившемся режиме полета и трудности запоминания положения разбр санных индексов при контроле за работой различных агрегатов и отклонения их от нормального состояния на этом режвме полета Этот индикатор может выдать интегральную оценку значений индишфуемых параметров за счет foro, что отсчетная liiauKa устанавл1&ается по осредненному значению этих параметров. При этом показания отдельных шкал остаются раз росанпыми на разлнч1плх уровнях,: и если один КЗ параметров изменит свое значение, то его будет установить по незначнтельному отклонению планки. Целью изобретения является повышение точности и удобства отсчета нндттруемых параметров. Это достигается тем, что в предлагаемое устройство введены электромагнитные муфты проскальзьюания и датчики перемещения, состоящие из подвижных я неподвижных частей,-а шкала выполнена в виде ленты с механизмом ее перемещения, при этом мexaниav ы перемещения ленты-ппсалы и ленты-индекса соединены соответственно с приводом и контактом датчика обратной связи через электромаг нитные муфты проскальзьшания, причем на каждой из лент закреплены подвижные части датчиков перемещения, а на корпусе устройст&а - неподвижные. Такое решение позволяет повысить точность и удобство отсчета индйннруемы па)аметров за счет обеспечения смещения ийдексов. и шкал к заранее выбранному уровню ,н81пример к средней линии щкального табло индикатора. На фиг. 1 показана кинематическая : схема описываемого устройства; на фиг. 2.- липевая панель устройства; на фиг. 3 - элект ромагнитная муфта. Устройство содержит корпус 1, в котором раэмеЩеЁОьг Четыре одинаковых механизма с различными шкалами 2 измеря емых параметров и одинаковыми индексами, выполненными в виде двзгхцветных лент 3. Каждая шкала выполнена на ленте 4, которая,закреплена на зубчатом ба рабане 5 и ролике 6, на котором закреплена пружина 7 натйга пенты./Лейты име ют направл5ГоЩие ролики 8. Двухцветная лента 3 зйкреплеиа на зубЧагом барабане 9 и ролике -1О, на котором закреплена пружина 11 натяга ленты; Зубчатый барабан 9 соедй)яей с редуктором привода 12, который, в свою очередь, соединено трибкой электродвигателя 13. На -бей подвижной системы Ю установлен контакт 14 датчика обратной связи 15. Зубчатый барабан 5 соединен с редуктором привода посредством элёктромаггттной муфты проскальзывания 16, устаиэва1енной в корпусе 17, который винт1ами 18 к корпусу индикатора 1, В kopnyce 17 подвижно установлена ось 19 на которой установлен через шарики 2О зубчатый барабан 5. Зубчатый барабан 5 посредством трибочного узла 21 соединен с зубчатым барабаном 9 - редуктора привода 12. На оси 19 с помощью штиф та 22 закреплен барабан 23, на котором закреплена лента 4 и подвижно в осевом 6 48 направлении установлено зубчатое колесо 4 с пазом 25, В корпусе 17 закреплен электромагнит 26 к тормоз 27, находящийся в зацеплении с зубчатым колесом 24, которое подпружинено пружинами 28., Аналогичную конструкшпо имеет я муф та 29, соединяющая ось ролика 10 и контакт 14 датчика обратной связи 15 На двухцветной ленте 3 закреплена подвижная часть датчика перемещения постоянный магнит 30 (на границе цветов: черный - белый), а на корпусе 1 индикатора, неподвижная часть - магнитоуправляет гые контакты 31 (герконы). На ленте 4 шкалы 2 закреплены постоянные магниты 32 - подвижная часть датчиков перемещения ленты 4, а на корпусе 1 индикатора - неподвижная часть - мапштоуправляемые контакты 33. Магниты 32 закреплены на таком расстоянии друг от друга, чтобы параметры крейсерского режима попета находились между ними. На корпусе 1 установлен переключатель 34 ретгсвдла полета. Линия а-а обозначает среднюю линию табло ивдикатора, т.е. заранее выбра1шый уровень,. / Устройство работает следуюпшм образом. , ... :При установившемся крейсерском режиме полета датчик при включении переключателя 34 в положение КреЙсерский режим подает электропитание в магнитоутгравляемые контакть 31. При этом постоянный магнит ЗО взаимодействует с контактами 31.и подает питание на электродёигатель 13, Одновременно с этим подается питание на электромагнит 26, который притягивает к себе зубчатое колесо 24, При этом зубчатое колесо 24 расцепляется с тормозом 27 и зацепляется с зубчатым барабаном 5. В это время электродвигатель 13 через редуктор привода 12 вращает зубчатый барабан 9 и через трибочный узел 21 зубчатый барабан 5, Вместе с зубчатьпу барабаном 5, зубчатым колесом 24 начинает вращаться барабан 23, который йеремещает ленту 4 со шкалой 2. Таким образом двухцветная лента 3 и шзсала 2 начнут перемещаться до тех пор, пока мапдгг 30 с границей цветов ленты 3 вместе со значением шкалы 2 не достигнут линии а-а, В этом месте магнитоуправляемые контакты 31 отсутствуют, я цепь питания ;электродвигателя 13 размыкается, в результате чего электродвигатель остано(Вится, Прекратится также питание электро м.агш1та 26. Под действием пружин 28 зубчатое колесо 24 расцепится с зубчатым барабаном 5 и зацепится с тормозом 27, Roc/te этого индикатор вновь сможет работать как в обычном режиме, но двухцветная лента 3 будет уже Отклоняться от линии а-а, что сразу обнаружит оператор, так как ленты 3 со своими шкалами 2 будут у линии . В это время зубчатый барабан 5 будет вращаться вхолостую на оси 19. Контакты 31 сверху от линии а-а запитаны одной полярностью, а ниже ее - другой, поэтому в любо случае электродвигатель 13 будет отрабатывать перемещение ленты 3 и шкалы 2 в направлении к линии а-а. После окончания крейсерского режима полета летчик переводит переключатель 34 в положение вьпслючего, при этом запитываются контакты 33 и в зависимости от того, где находятся постоянные магниты 32: выше или ниже того места где нет койЕтактов 33, шкала 2 начинает отрабатываться электродвигателем 13 к своему нулевому положению вместе с лентой 3. Муфта проскальзывания 29 работает в это время аналогично муфте . 16 только в обратном направлении. . образом, использование в предлагаемом устройстве sineictpoM irifflTных муфт проскалвэзывания и датчиков перемешения ленты-шкалы и лёнты-ивдекса позволяет осуществлять отсчет индуцируемых, параметров по нескольким шкааам на; одном определенном уровне, что приводит к повышению точности и удобства отсчета.. Формула изоб е н и я Индикаторное устройство, преимущественно для индикации нескольких параметров, содержащее корпус, внутри которого для каждого парш 1етра установлена тикала и двухцветная лента-индекс с механид мом ее перемещения, кинематически связанным с приводом и контактом датчика обратной связи, отличающеес я т&л, что, с цетшю повышения точ- ности и удобства отсчета индйшфуемых параметров, в него введены электромагнитные муфты проскальзывания и датчики перемещения, состршпиё из подвижных :и неподвижных Частей, а шкала выполнена в виде ленты с механизмом ее перемеще Ешя, при этом механизмы перемеШения ленты-шкалы и ленты-индекса соединены соответственно с приводом и контак том датчика обратной связи через электромагнитные муфты проскальзывашш7 . причил.на каждой из лент закреплены подвижные часта датЧШов перемвдения, а на корпусе устройства - неподвшкные. Источники, информации, принятые во внюлание при экспертизе 1. Авторское сбидетеяьство СССР № 214114, кл. G 01 L 19/08, 1966.. 2. Авторское свидетельство СССР № 284371, кл. G OIL 19/08, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Профильный индикатор | 1975 |
|
SU565212A1 |
| ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ и РЕГИСТРАЦИИ МОМЕНТА ПРУЖИННОГО ДВИГАТЕЛЯ | 1973 |
|
SU368582A1 |
| Профильный индикатор | 1983 |
|
SU1113673A1 |
| Натяжное устройство | 1977 |
|
SU662804A1 |
| Индикатор | 1979 |
|
SU849012A1 |
| Скоростная камера ждущего типа | 1986 |
|
SU1385117A1 |
| Устройство для измерения деформаций и прогибов конструкций | 1976 |
|
SU741032A1 |
| Устройство для выноса трубчатого элемента | 1973 |
|
SU502401A1 |
| Привод барабанных летучих ножниц | 1973 |
|
SU524687A1 |
| Профильный индикатор | 1973 |
|
SU455243A1 |


