1
Полуавтомат предназначен для использования при разработке, исследовании и изготовлении пружинных двигателей.
Пружинный двигатель как аккумулятор механической энергии широко применяется в приборах точной механики. Параметры и качество пружинных двигателей очень часто определяют качество и надежность 1работы прибора. Так, например, продолжительность хода механических часов между двумя очередными заводами, а также точность хода часов существенно зависят от характера изменения вращающего момента пружинного двигателя при раскручивании заводной пружины.
Совершенно очевидно, что высокое качество (пружинных двигателей может быть получено только при наличии аппаратуры, позволяющей определять оптимальные параметры двигателя при его разработке и макетировании, а также осуществлять высокопроизводительный контроль пружинных двигателей в условиях массового производства.
Известен прибор для контроля и регистрации момента пружинного двигателя, содержащий установочное приспособление, чувствительный элемент, регистрирующее устройство и электродвигатель привода.
Чувствительным элементом является эталонная пружина, один коиец которой закреплен «еподвижйо, а другой, свободный, соединен с барабаном пружинного двигателя гибкой связью. С эталонной пружиной связа)ю также перо регистрирующего устройства. Момент пружинного двигателя регистрируется только при раскручивании заводной пружины, осуществляемом электродвигателем, который кинематически связан с заводным валиком пружииного двигателя.
Несмотря на высокую производительность, этот прибор имеет ряд существе ны.х недостатков.
Применение эталонной пружины, деформация которой равна щирине ленты регистрирующего устройства, приводит к методической погрещности регистрации, вследствие того, что перемещение носителя регистрации не соответствует истинному углу закручивания заводной пружины, поскольку одновременно с поворотом заводного валика приводится в движение и барабан пружинного двигателя, воздействующий на эталонную пружину и регистрирующий орган.
Непосредственная регистрация деформации эталонной пружины резко ограничивает масштабы записи и чувствительность прибора.
Регистрация момента пружинного двпгатсля только при спуске заводной пруж)п;ы исключает возмож)1ость определения такого важного параметра пружинного двигагеля.
как к.П. д. Для определения к. п. д. пружинного двигателя необходимо регистрировать диаграмму работы заводной пружины как при ее заводе, так и при спуске.
Этот прибор недостаточно универсален и удобен в работе. Так, например, изменение диапазонов измерения производится заменой эталонной пружины. Чтобы барабан прулсинного дигателя установить в измерительную позицию, его необходимо запрессовать в переходный диск, который штифтами фиксируется «а приборе.
В приборе отсутствуют устройства для высокопроизводительного контроля момента пружинных двигателей в условиях массового производства.
Целью изобретения является создание высоко-производительного и универсального полуавтомата, обеспечивающего высокую точность регистрации момента заводной пружи«ы при ее заводе ,и спуске и а втоматичеокой контроль момента пружиниого двигателя во время спуска заводной пружины при заданных углах ее закручивания.
Цель достигается за счет того, что нолуавтомат снабжен устройством автоматического контроля момента пружинного двигателя и упругой предохранительной муфтой, ведупхий вал которой через редуктор связан с реверсивным электродвигателем привода, а ведомый - с установочным приспособлением. Чувствительный элемент выполнен в виде связанного шарнирной тягой с установочным приспособлением и расположенного в упругом подвесе сердечника индуктивного датчика, вторичная обмотка которого через усилитель подключена к диагонали измерительного моста, связанного через электродвигатель с регистрирующим устройством и через систему подвижных контактов с устройством автоматического контроля.
Упругая предохранительная муфта выполнена в виде многовитковой спиральной пружины, один конец которой закреплен на ведущем валу,а другой - на храповом колесе. Цоследнее свободно насажено на ведомом валу и связано с НИМ храповой собачкой, закрепленной на диске. Диск жестко связан с ведомым валом и несет контактную систему, взаимодействующую с толкателем, запрессованным в водило, жестко закрепленное на ведущем валу и взаимодействующее со стенкой паза, имеющегося в диске.
Регистрирующее устройство представляет собой реверсивный лентопротяжный механизм с двумя приемно-подающими барабанами и ведущИМ барабаном, связанным с приемно-подающими барабанами муфтами одностюрониего действия. На валах ириеаино-подающих барабанов жестко закреплены храповые колеса с взаимно противоположным направлением зубьев, взаимодействующие с неподвижно закрепленными храповыми собачками. Установочное приспособление составлено из
двух подпружиненных захватов, шарнирно закрепленных своей средней частью на корпусе, расположенном на связанном с реверсивным электродвигателем привода валу. Внутри корпуса в подщипниках установлен центрирующий валик, через валик испытуемого пружинного двигателя связанный с осью, соединенной щарнирной тягой с чувствительным элементом.
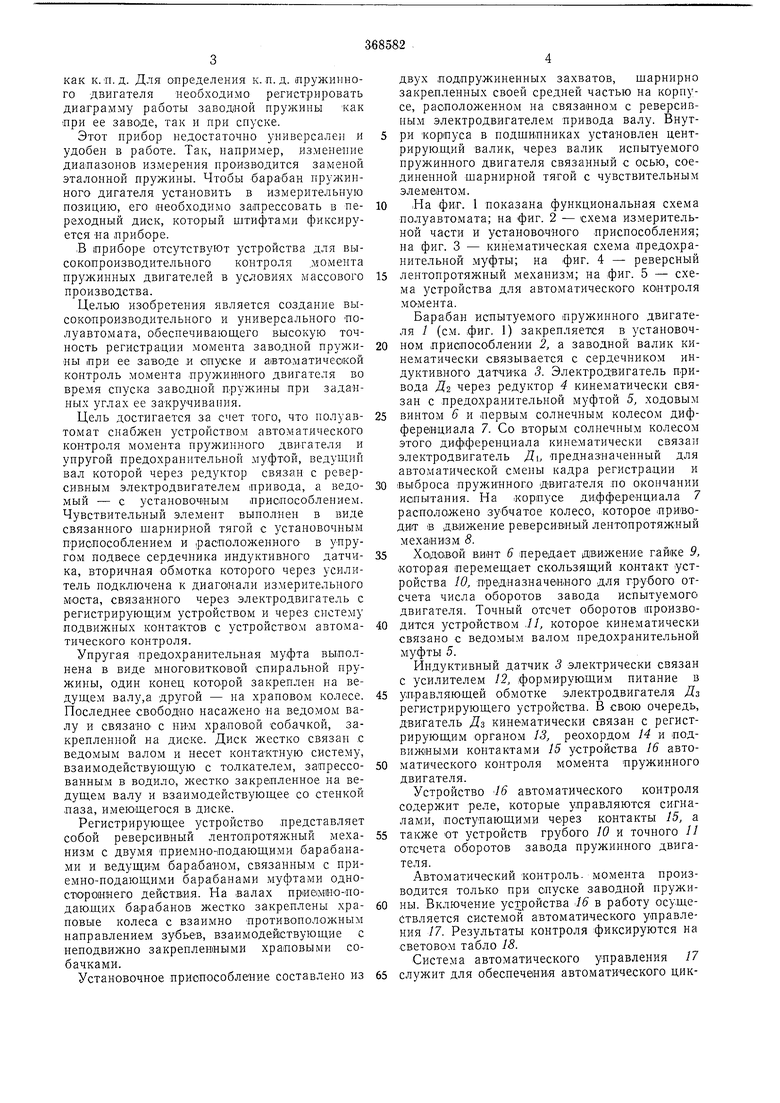
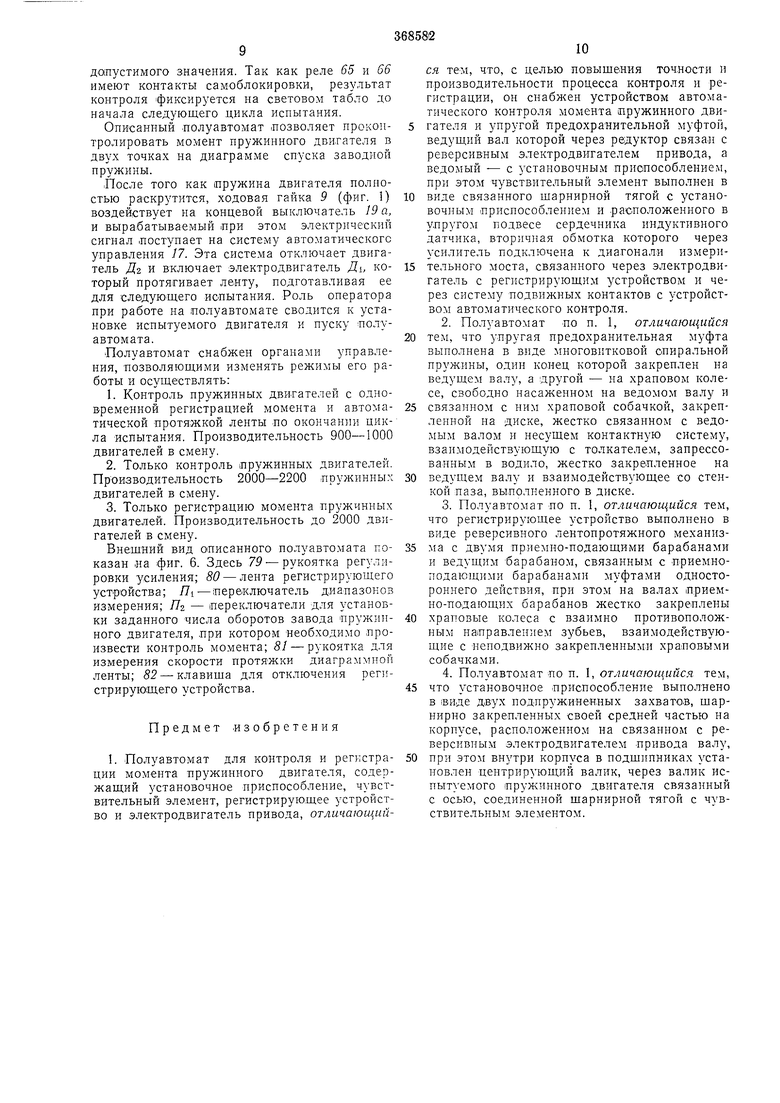
Ца фиг. 1 показана функциональная схема полуавтомата; на фиг. 2 - схема измерительной части и установочного приспособления; на фиг. 3 - кинематическая схема предохранительной муфты; на фиг. 4 - реверсный лентопротяжный механизм; на фиг. 5 - схема устройства для автоматического контроля мОМента.
Барабан испытуемого пружинного двигателя / (см. фиг. 1) закрепляется в установочном приспособлении 2, а заводной валик кинематически связывается с сердечником индуктивного датчика 3. Электродвигатель привода Д2 через редуктор 4 кинематически связан с предохранительной муфтой 5, ходовым винтом 6 и первым солнечным колесом дифференциала 7. Со вторым солнечным колесом этого дифференциала кинематически связан электродвигатель Д, предназначенный для автоматической смены кадра регистрации и выброса пружинного двигателя по окончании испытания. На корпусе дифференциала 7 расположено зубчатое колесо, которое приводит е движение реверсивный лентопротяжный механизм 8.
Ходовой винт 6 передает движение гайке 9, которая перемещает скользящий контакт устройства 10, предназначенного для грубого отсчета числа оборотов завода испытуемого двигателя. Точный отсчет оборотов производится устройством .//, которое кинематически связано с ведомым валом предохранительной муфты 5.
Индуктивный датчик 3 электрически связан с усилителем 12, формирующим питание в управляющей обмотке электродвигателя Дз регистрирующего устройства. В свою очередь, двигатель Дз кинематически связан с регистрирующим органом 13, реохордом 14 и подвижными контактами 15 устройства 16 автоматического контроля момента пружинного двигателя.
Устройство -16 автоматического контроля содержит реле, которые управляются сигналами, поступающими через контакты 15, а также от устройств грубого 10 и точного // отсчета оборотов завода пружинного двигателя.
Автоматический контроль- момента производится только при спуске заводной пружины. Включение устройства -16 в работу осуществляется системой автоматического управления 17. Результаты контроля фиксируются на световОМ табло 18.
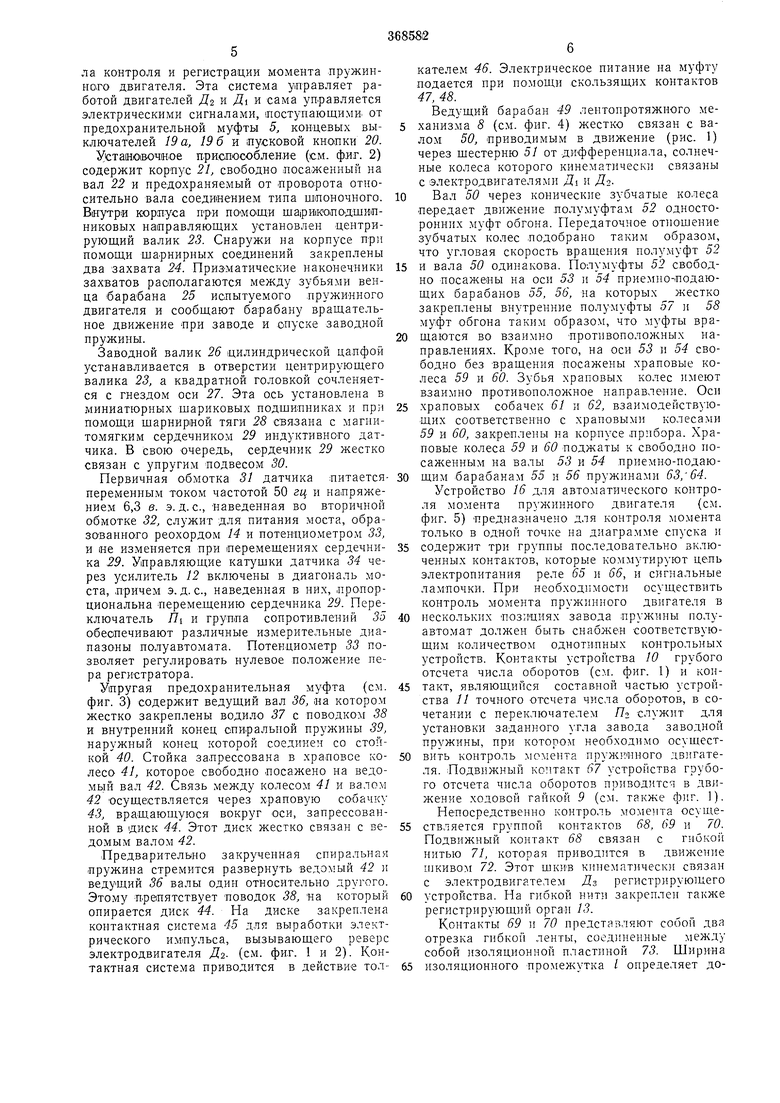
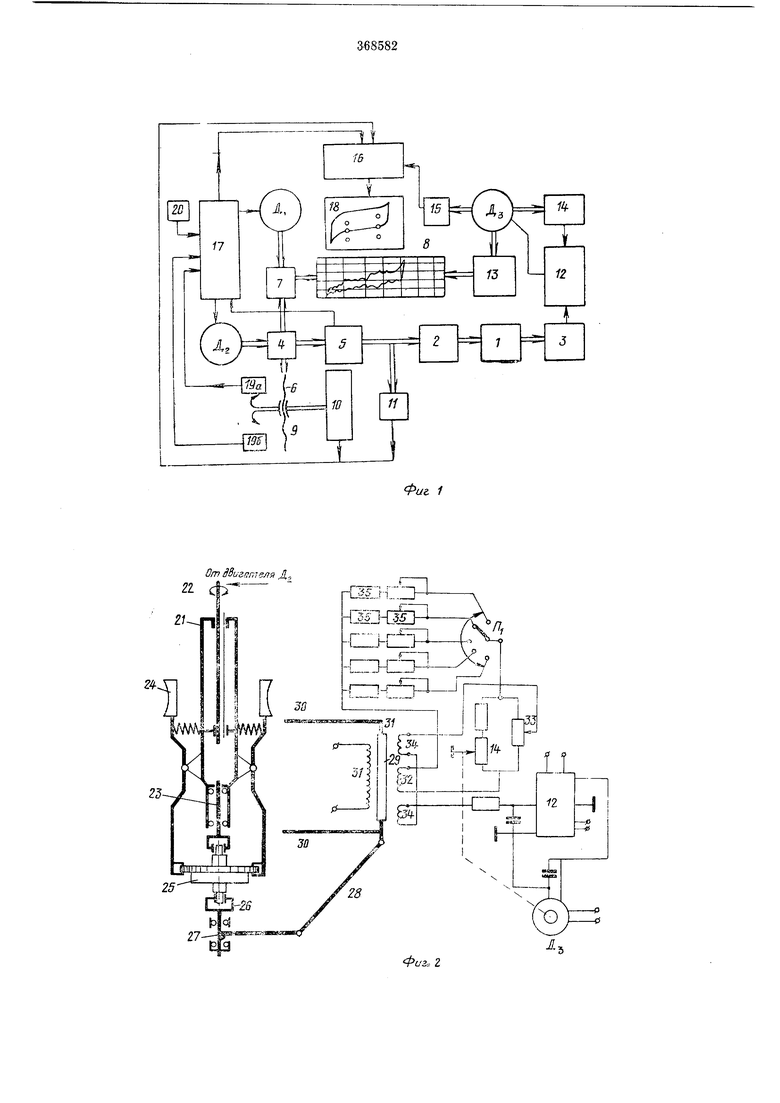
Система автоматического управления 17 служит для обеспечения автоматического цикла контроля и регистрации момента пружинного двигателя. Эта система управляет работой двигателей Дд и Д1 и сама управляется электрическими сигналами, шоступающими от предохранительной муфты 5, концевых выключателей 19 а, /5 б и пусковой кнопки 20. Устано1ВОЧ1Н|Ое приспособление (см. ф.иг. 2) содержит корпус 21, сво-бодно посаженный на вал 22 и предохраняемый от проворота относительно вала соединением типа шпоночного.
Внутри корпуса НрИ помощи Ша|рИ|КОПОД:ШИПниковых направляющих установлен центрирующий валик 23. Снаружи на корпусе при помощи шарнирных соединений закреплены два захвата 24. Призматические наконечники захватов располагаются между зубьями венца барабана 25 испытуемого пружи-нного двигателя и сообщают барабану вращательное движение при заводе и спуске заводной пружины.
Заводной валик 26 цилиндрической цапфой устанавливается в отверстии центрирующего валика 23, а квадратной головкой сочленяется с гнездом оси 27. Эта ось установлена в миниатюрных шариковых подшипниках и при помощи шарнирной тяги 28 связана с магнитомягким сердечником 29 индуктивного датчика. В свою очередь, сердечник 29 жестко связан с упругим подвесом 30.
Первичная обмотка 31 датчика питаетсяпеременным током частотой 50 гц и напряжением 6,3 в. э. д. с., -наведенная во вторичной обмотке 32, служит для питания моста, образованного реохордом 14 и потенцио.метро.м 33, и не изменяется при перемещениях сердечника 29. Управляющие катушки датчика 34 через усилитель 12 включены в диагональ моста, причем э. д. с., наведенная в них, пропорциональна перемещению сердечника 29. Переключатель /7i и группа сопротивлений 35 Обеопечивают различные измерительные диапазоны полуавтомата. Потерщиометр 33 позволяет регулировать нулевое положение пера регистратора.
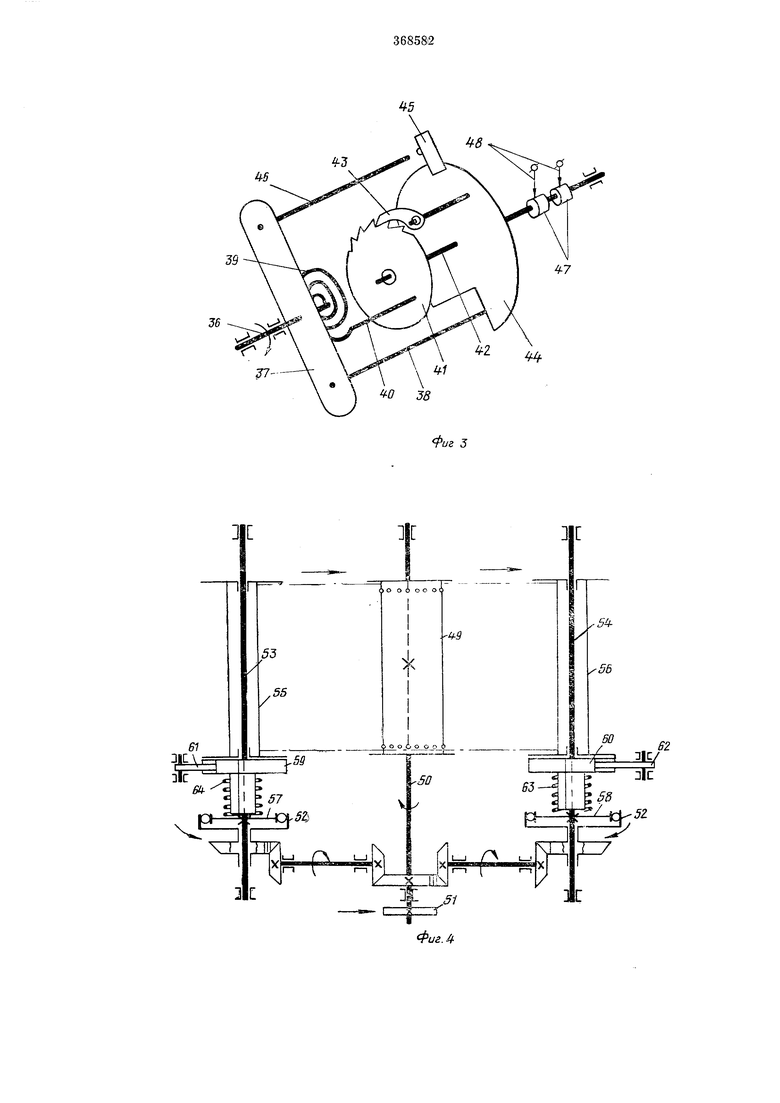
Упругая предохранительная муфта (см. фиг. 3) содержит ведущий вал 36, на котором жестко закреплены водило 37 с поводком 38 и внутренний конец спиральной пружины 39, наружный конец которой соединен со стойкой 40. Стойка запрессована в храповое колесо 41, которое свободно посажено на ведомый вал 42. Связь между колесом 41 и валом 42 осуществляется через храповую собачку 43, вращающуюся вокруг оси, запрессованной в диск 44. Этот диск жестко связан с ведомым валом 42.
Предварительно закрученная спиральная пружина стремится развернуть ведомый 42 и ведущий 36 валы один относительно другого. Этому препятствует поводок 38, на который опирается диск 44. На диске закреплена контактная система 45 для выработки электрического импульса, вызывающего реверс электродвигателя Д. (см. фиг. 1 и 2). Контактная система приводится в действие толкателем 46. Электрическое питание на .муфту подается при помощи скользящих контактов 47, 48.
Ведущий барабан 49 лентопротяжного механизма 8 (см. фиг. 4) жестко связан с валом 50, приводимым в движение (рис. 1) через щестерню 51 от дифференциала, солнечные колеса которого кинематически связаны с электродвигателями Д и Д.
Вал 50 через конические зубчатые колеса передает движение полумуфтам 52 односторонних муфт обгона. Передаточное отношение зубчатых колес подобрано таким образом, что угловая скорость вращения нолумуфт 52
и вала 50 одинакова. Полумуфты 52 свободно посажены на оси 53 л 54 приемно-подающих барабанов 55, 56, на которых жестко закреплены внутренние полумуфты 57 и 58 муфт обгона таким образом, что муфты вращаются во взаимно противополол ных направлениях. Кроме того, на оси 53 и 54 свободно без вращения посажены храповые колеса 59 и 60. Зубья храповых колес имеют взаимно противоположное направление. Оси
храповых собачек 61 и 62, взаимодействующих соответственно с храповыми колеса.ми 59 и 60, закреплены на корпусе прибора. Храповые колеса 59 и 60 поджаты к свободно посаженным на валы 53 и 54 приемно-подающим барабанам 55 и 56 пружинами 63,64.
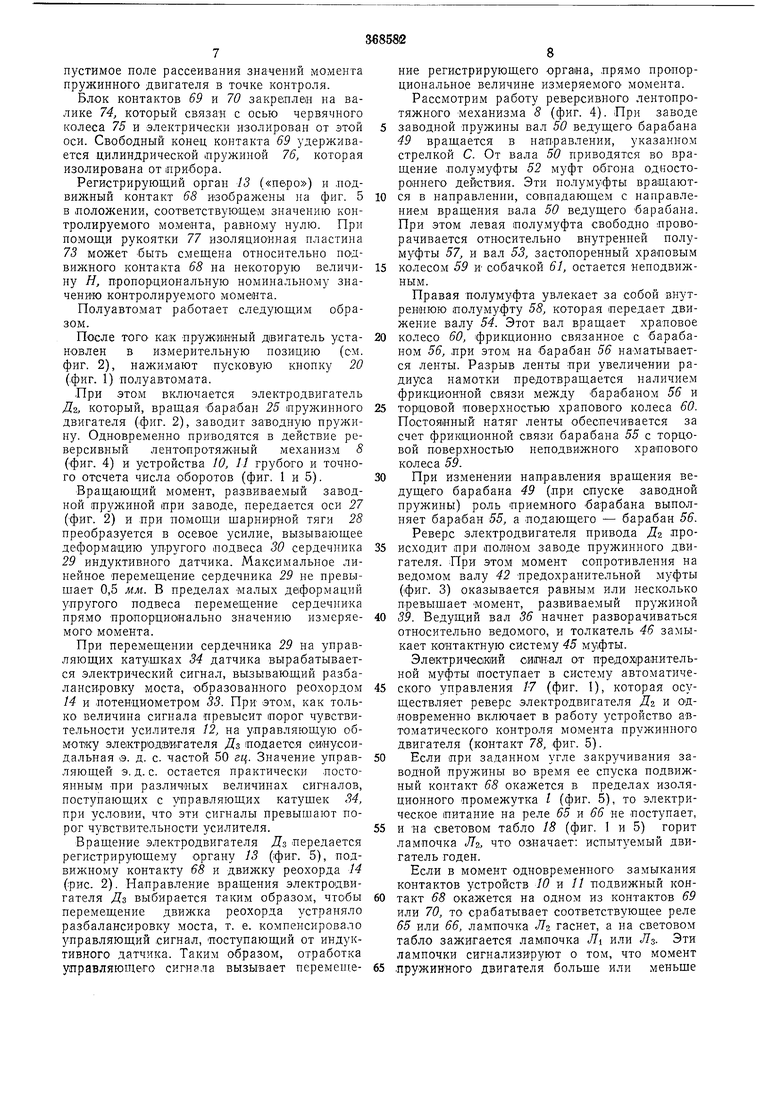
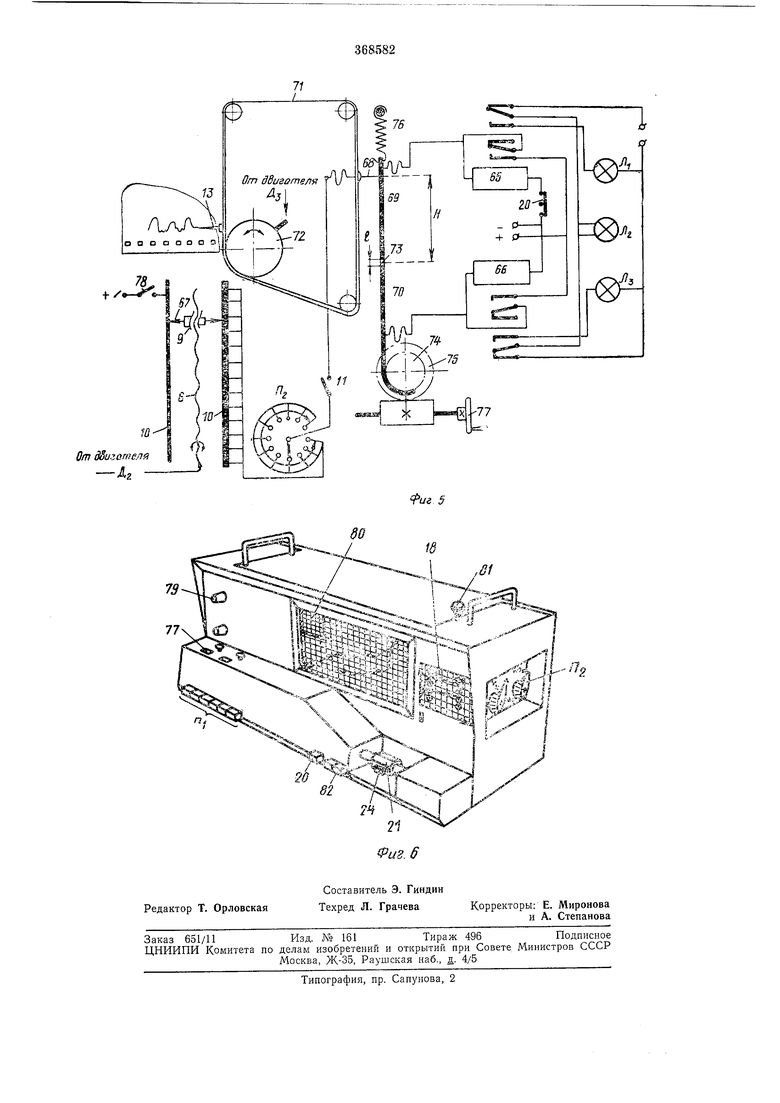
Устройство 16 для автоматического контроля момента пружинного двигателя (см. фиг. 5) предназначено для контроля момента только в одной точке на диаграмме спуска и
содержит три группы последовательно включенных контактов, которые коммутируют цепь электропитания реле 65 и 66, и сигнальные лампочки. При необходимости осуществить контроль момента пружинного двигателя в
нескольких позициях завода пружины полуавто.мат должен быть снабжен соответствующим количеством однотипных контрольных устройств. Контакты устройства 10 грубого отсчета числа оборотов (см. фиг. 1) и контакт, являющийся составной частью устройства // точного отсчета числа оборотов, в сочетании с переключателем П служит для установки заданного угла завода заводной пружины, при котором необходимо осуществить контроль момента пружинного двигателя. Подвижный контакт 67 устройства грубого отсчета числа оборотов приводится в движение ходовой гайкой 9 (см. также фпг. 1). Непосредственно контроль осуществляется группой контактов 68, 69 и 70. Подвижный контакт 68 связан с гибкой нитью 71, которая приводится в движение шкивом 72. Этот шкив кинематически связан с электродвигателем Дз регистрирующего
устройства. Па гибкой нити закреплен также регистрирующий орган 13.
Контакты 69 н 70 представляют собой два отрезка гибкой ленты, соединенные между собой изоляционной пластиной 73. Ширина
изоляционного нромен-сутка / определяет допустимое поле рассеивания значений момента пружинного двигателя в точке контроля.
Блок контактов 69 и 70 закреплен на валике 74, который связан с осью червячного колеса 75 и электрически изолирован от этой оси. Свободный конец контакта 69 удерживается цилиндрической пружиной 76, которая изолирована от прибора.
Регистрирующий орган 13 («перо) и подвижный контакт 68 изображены на фиг. 5 в положении, соответствующем значению контролируемого момепта, равному нулю. При помощи рукоятки 77 изоляционная пластина 73 может -быть смещена относительно подвижного контакта 68 на некоторую величину Н, пропорциональную номинальному значению контролируемого момента.
Полуавтомат работает следующим образом.
После того как пруж1И1ННый двигатель установлен в измерительную позицию (ом. фиг. 2), нажи.мают пусковую кнопку 20 (.фиг. 1) полуавтомата.
При этом включается электродвигатель Д, который, вращая барабан 25 пружинного двигателя (фиг. 2), заводит заводную пружину. Одновременно приводятся в действие реверсивный лентопротяжный механизм 8 (фиг. 4) и устройства 10, 11 грубого и точного отсчета числа о-боротов (фиг. 1 и 5).
Вращающий момент, развиваемый заводной пружиной при заводе, передается оси 27 (фиг. 2) и при помощи щарнирной тяги 28 преобразуется в осевое усилие, вызывающее деформацию упругого подвеса 30 сердечника 29 индуктивного датчика. Максимальное линейное перемещение сердечника 29 не превыщает 0,5 мм. В пределах малых деформаций упругого подвеса перемещение сердечника прямо пропорционально значению измеряемого момента.
При перемещении сердечника 29 на управляющих катушках 34 датчика вырабатывается электрический сигнал, вызывающий разбалансировку моста, образованного реохордом 14 и потенциометром 55. При этом, как только величина сигнала превысит порог чувствительности усилителя 12, на управляющую обмотку электродвигателя Дз подается синусоидальная э. д. с. частой 50 гц. Значение управляющей э.д. с. остается практически постоянным при различных величинах сигналов, поступающих с управляющих катущек 34, при условии, что эти сигналы превышают порог чувствительности усилителя.
Вращение электродвигателя Дз передается регистрирующему органу 13 (фиг. 5), подвижному контакту 68 и движку реохорда 14 (рис. 2). Направление вращения электродвигателя Дз выбирается таким образом, чтобы перемещение движка реохорда устраняло разбалансировку моста, т. е. компенсировало }правляющий сигнал, поступающий от индуктивного датчика. Таким образом, отработка управляющего сигнала вызывает nepeMeuieние регистрирующего органа, прямо пропорциональное величине измеряемого момента.
Рассмотрим работу реверсивного лентопротяжного механизма 8 (фиг. 4). При заводе заводной пружины вал 50 ведущего барабана 49 вращается в направлении, указанном стрелкой С. От вала 50 приводятся во вращение полу.муфты 52 муфт обгона одностороннего действия. Эти полумуфты вращаются в направлении, совпадающем с направлением вращения вала 50 ведущего барабана. При этом левая полумуфта свободно проворачивается относительно внутренней полумуфты 57, и вал 53, застопоренный храповым
колесом 59 И собачкой 61, остается неподвижным.
Правая полумуфта увлекает за собой внутреннюю полумуфту 55, которая передает движение валу 54. Этот вал вращает храповое
колесо 60, фрикционно связанное с барабаном 56, при этом на -барабан 56 на-матывается ленты. Разрыв ленты при увеличении радиуса намотки предотвращается наличием фрикционной связи между барабаном 56 и
торцовой поверхностью храпового колеса 60. Постоянный натяг ленты обеспечивается за счет фрикционной связи барабана 55 с торцовой поверхностью неподвижного храпового колеса 59.
При изменении направления вращения ведущего барабана 49 (при спуске заводной пружины) роль приемного барабана выполняет барабан 55, а подающего - барабан 56. Реверс электродвигателя привода Да происходит при полном заводе пружинного двигателя. При этом момент сопротивления на ведомом валу 42 предохранительной муфты (фиг. 3) оказывается равным или несколько превыщает момент, развиваемый
59. Ведущий вал 36 начнет разворачиваться относительно ведомого, и толкатель 46 замыкает контактную систему 45 муфты.
Электричесмий сИ|БНал от предох|ран.ительной муфты поступает в систему автоматического управления 1-7 (фиг. 1), которая осуществляет реверс электродвигателя ДЕ и одновременно включает в работу устройство автоматического контроля момента пружинного двигателя (контакт 78, фиг. 5).
ЕСЛИ при заданном угле закручивания заводной пружины во время ее спуска подвижный контакт 68 окажется в пределах изоляционного промежутка / (фиг. 5), то электрическое питание на реле 65 и 66 не поступает,
и на световом табло 18 (фиг. 1 и 5) горит лампочка Л, что означает: испытуемый двигатель годен.
Если в момент одновременного замыкания контактов устройств /О и // подвижный контакт 68 окажется на одном из контактов 69 или 70, то срабатывает соответствующее реле 65 или 66, лампочка Л гаснет, а на световом табло зажигается лампочка Л или Яз. Эти лампочки сигнализируют о том, что момент
.пружинного двигателя больще или меньше
допустимого значения. Так как реле 65 и 66 имеют контакты самоблокировки, результат контроля фиксируется на световом табло до начала следующего .цикла испытания.
Описанный .полуавтомат .позволяет проконтролировать момент пружинного двигателя в двух точках на диаграмме спуска заводной пружины.
После того как шружина двигателя полностью раскрутится, ходовая гайка 9 (фиг. 1) воздействует на концевой выключатель 19 а, и вырабатываемый при этом электрический сигнал .поступает на систему автоматического управления 17. Эта система отключает двигатель Дз и включает электродвигатель Д1, который протягивает ленту, подготавливая ее для следующего испытания. Роль оператора при работе на полуавтомате сводится к установке испытуемого двигателя и пуску полуавтомата.
Полуавтомат снабжен органами управления, позволяющими изменять режимы его работы и осуществлять:
1.Контроль пружинных двигателей с однов-ременной регистрацией момента и автоматической протяжкой ленты по окончании цикла испытания. Производительность 900-1000 двигателей в смену.
2.Только контроль пружинных двигателей. Производительность 2000-2200 пружинных двигателей в смену.
3.Только регистрацию момента пружинных двигателей. Производительность до 2000 двигателей в смену.
Внешний вид описанного полуавтомата показан на фиг. 6. Здесь 79 -рукоятка регулировки усиления; 80 - лента регистрирующего устройства; HI-пере.ключатель диапазонов измерения; HZ - переключатели для установки заданного числа оборотов завода пружинного двигателя, при котором необходимо произвести контроль момента; 81 - рукоятка для измерения скорости протяжки диаграммной ленты; 82 - клавища для отключения регистрирующего устройства.
Предмет изобретения
1. Полуавтомат для контроля и регистрации момента пружинного двигателя, содержащий установочное приспособление, чувствительный элемент, регистрирующее устройство и электродвигатель привода, отличающийся тем, что, с целью повыщения точности и производительности процесса контроля и регистрации, он снабжен устройством автоматического контроля момента пружинного двигателя и упругой предохранительной муфтой, ведущий вал которой через редуктор связан с реверсивным электродвигателем привода, а ведомый -- с установочным приспособлением, при этом чувствительный элемент выполнен в
виде связанного щарнирной тягой с установочным приспособлением и .расположенного в упругом подвесе сердечника индуктивного датчика, вторичная обмотка которого через усилитель подключена к диагонали измерительного моста, связанного через электродвигатель с регистрирующим устройством и через систему подвижных контактов с устройством автоматического контроля.
2.Полуавтомат по п. 1, отличающийся тем, что упругая предохранительная муфта
выполнена в виде многовитковой спиральной пружины, один конец которой закреплен на ведущем валу, а другой - на храповом колесе, свободно насаженном на ведомом валу и
связанном с ним храповой собачкой, закрепленной на диске, жестко связанном с ведомым валом и несущем контактную систему, взаимодействующую с толкателем, запрессованным в водило, жестко закрепленное на
ведущем валу и взаимодействзЮщее со стенкой паза, выполненного в диске.
3.Ползавтомат по п. 1, отличающийся тем, что регистрирующее устройство выполнено в виде реверсивного лентопротяжного механизма с двумя приемно-подающими барабанами и ведущим барабаном, связанным с .нриемноподающими барабанами муфтами одностороннего действия, при этом на валах приемно-подающих барабанов жестко закреплены
храповые колеса с взаимно нротивоположным направлением зубьев, взаимодействующие с неподвижно закрепленнымн храповыми собачками.
4.Полуавтомат .по п. 1, отличающийся тем, что установочное приспособление выполнено
в виде двух подпружиненных захватов, щарнирно закрепленных своей средней частью на корпусе, расположенном на связанном с реверсивным электродвигателем привода валу, при этом внутри корпуса в подщ пниках установлен центрирующий валик, через валик испытуемого пружинного двигателя связанный с осью, соединенной шарнирной тягой с чувствительным элементом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2153099C1 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2151323C1 |
| Устройство для измерения величины набегания подъемного сосуда на канат при торможении подъемной установки в наклонных выработках | 1978 |
|
SU867835A1 |
| УЗЕЛ ЗАВОДА ЧАСОВ И ЧАСЫ, СОДЕРЖАЩИЕ ТАКОЙ УЗЕЛ | 2018 |
|
RU2760425C2 |
| Устройство для контроля ресурса элементов пневмоаппаратуры | 1988 |
|
SU1580327A1 |
| Устройство для защиты от перегрузок привода конусной дробилки | 1982 |
|
SU1069854A1 |
| ШАГОВЫЙ ПРИВОД | 1972 |
|
SU335752A1 |
| ТРАНСМИССИЯ ВЕРТОЛЕТА | 2013 |
|
RU2559676C2 |
| Сдвоенная муфта | 1978 |
|
SU775459A1 |
| САМОКАТ ГОРЛОВА | 1997 |
|
RU2131821C1 |
38игпп:- /гя ,
Л.
Фиг. г
45
53 55
/
67
59
s
й57
52,.
I X
Ч
3 с
l
-t-
ФигЛ
