Изобретение относится к области акустических измерений и может быть использовано для измерения времеии задержки сигнала в акустических волноводах и других средах с дисперсией скорости, в частности, в средах с монотонной зависимостью времени задержки с игнала от его частоты.
Известен способ измерения времени задержки сигнала в среде с дисперсией скорости, основанный на возбуждении в среде упругого импульса, его приеме, преобразовании в электрический снгнал, сложении со вспомогательньш электрическим тональным сигналом и измерении времени задержки по минимуму амплитуды суммарного сигнала Ц.
Устройство, Осуществляющее зтот способ, содержит генератор, соединенный с фазовращателем, формирователь прямоугольных импульсов, излучающий и приемньш преобразователи, соединенный с приемным датчиком усилнтель, блок сложения и злектронно-лучевой осциллограф. .
Наиболее близким по технической сущности к предлагаемому изобретению является способ
измерения времеии задержки сигнала в среде . с дисперсией скорости, оснЬваиный на преобра-зоваиии злектрического сигнала в упругий импульс, излучении последнего в среду, приеме его и преобразоваиии в электрический сигнал 2. Согласно этому способу формируют электрические импульсы с гауссовой огибающей с частотой заполнения fо, преобразуют их в упругие импульсы, излучают упругие импульсы в среду, принимают их, преобразуют в электрические импульсы и по временному интервалу между максимумами амплитуд входного и выходного электрических импульсов определяют время задержки сигнала на частоте fo.
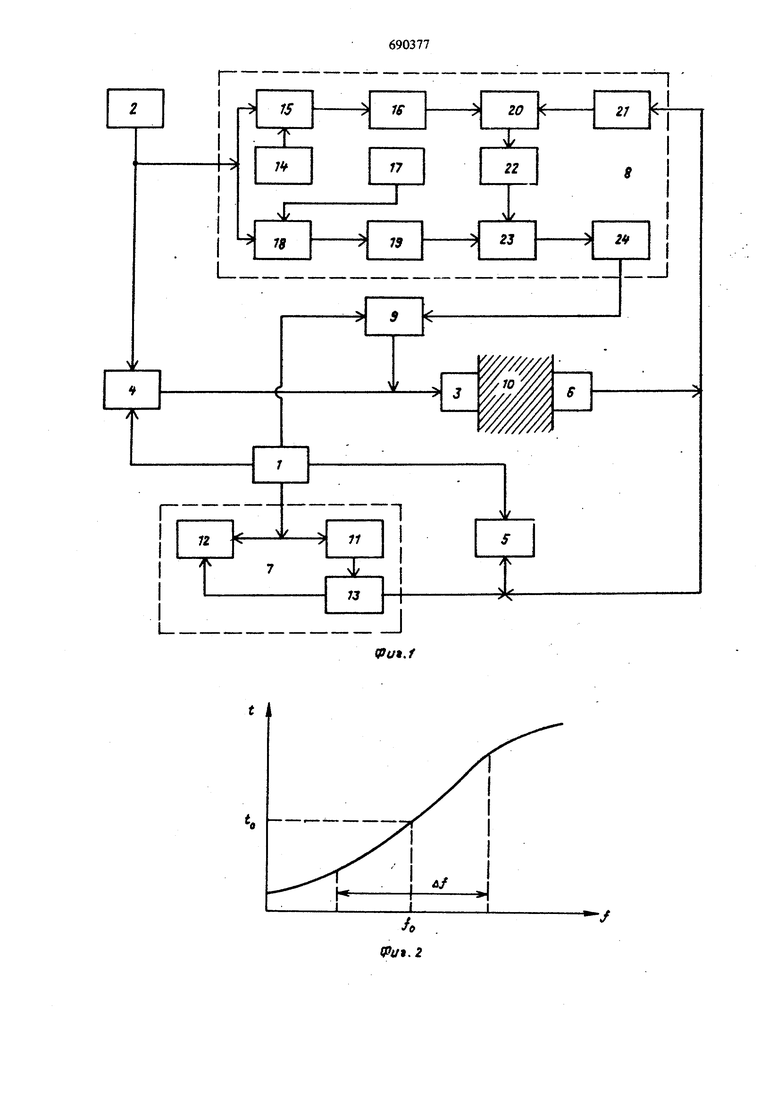
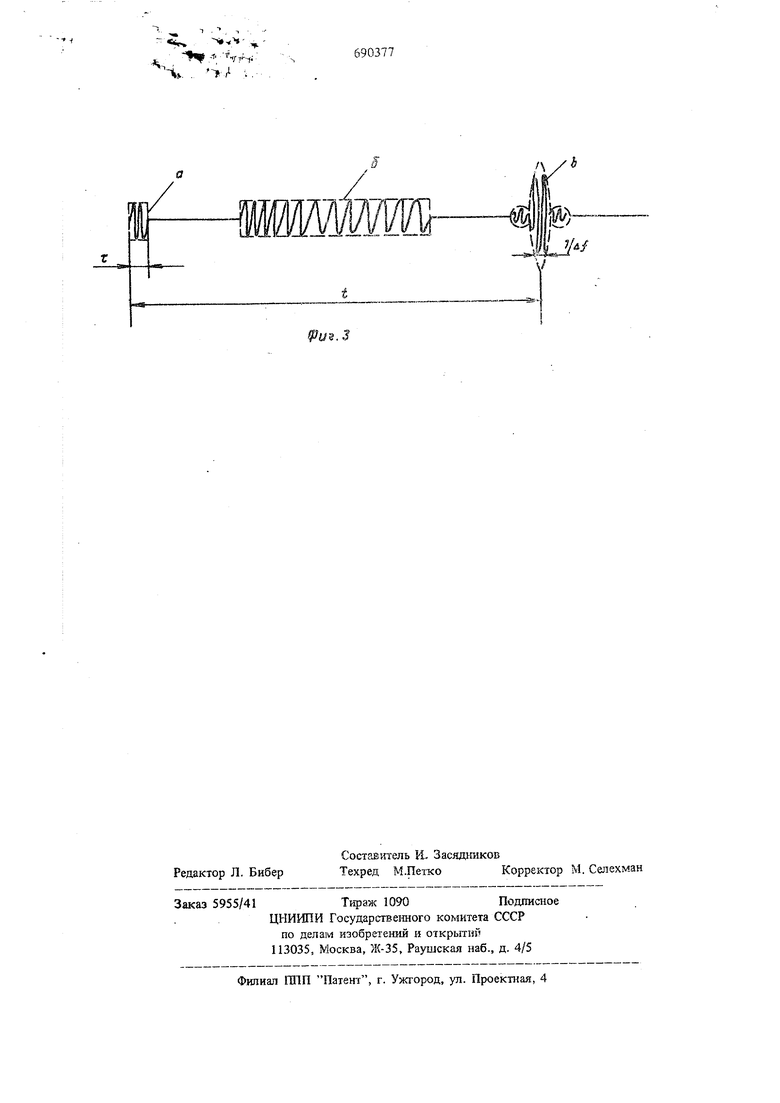
, Устройство, реализующее указанный способ, содержит генератор управляющих импульсов, генератор синусоидальных колебаний, излучающий электромеханический преобразователь, модулятор, один вход которого соединен с генератором синусоидальных колебаний, другой вход соединен с генератором управляющих импульсов, а выход соединен с излучающим электромеханическим преобразователем, индикатор, соединен|ный с генератором управляющих импульсов. приемный электромеханический преобразователь соединенный с индикато юм и генератором упра ляющих импульсов (2. Недостатком известных способов и устройст является большая погрешность измерений. Ошиб ка измерений возникает за счет того, что в некоторых случаях импульс на выходе среды силь но растягивается и невозможно точно определит положение его максимума. Величина ошибки в этих случаях пропорциональна тк, где , ; к-511 1|. ;-:.t - время задержки сигнала. Цель изобретения - повышение точности измерения времени задержки сигнала. . Это достигается за счет того, что частотньш спектр Принятого электрического инвертируют относительно заданной частоты, модулируют сигнал по амплитуде, преобразуют его в упругий импульс, повторно излучают в среду, принимают на том же расстоянии, преобразуют в электрический сигнал и по его задержке относительно момента излучения в среду первоначального упругого импульса судят о времени за держки сигнала на заданной частоте. При этом в устройство для осуществления данного способа введены инвертор частотного спектра и второй модулятор, причем первьш Ьход второго модулятора соединен с генератором управляющих импульсов, вход соеданен с 8ь1х6дом HHBepiTopa частотного спейтра а Вьйсод отединен с излучаюцдам электромехани ческим преобразователем, первый вход инвертоjpa с6ёдий1гн с reHepafbjjOM синусоидальных коле баний| а другой вход подключен к приемному пра)бразователю. На фиг. 1 представлена блок-схема устройства, реализующего предлагаемый способ; на фиг. 2 -трафик зависимости времени з адержки от частоты для контролируемой среды; на фиг. 3 - электрические сигналы, по которым опреДеяяйт время задержки. Устройство для осуществления предложенно го способа содержит генератор 1 управляющих импульсов, генератор 2 синусоидальных колебаний, излучающий электромеханический преобразователь 3, модулятор 4, один вход которого соединен с генератором 2, другой вход соединен с генератором 1, а выход соединен с излучающим преобразователем 3, индикатор 5, соединенный с генератором 1, приемный злектромеханическими преобразователь б, соединенный с индикатором, блок 7 временного интервала, соединенный с индикатором 5 и управляющим генератором 1, инвертор 8 «lacTorKoro спектра И дополнительный модулятор 9, первый вход kotoporo соединен с зттравляющим генератором 1, второй вход соединен с выходом инвертора 8, а выход соединен с излучающим преобразователем 3, причем один вход инвертора 8 соединен с генератором 2 синусоидальньгх колебаний, а другой вход соединен с приемным преобразователем 6, при этом излучающий 3 и приемный 6 преобразователи находятся в акустическом контакте с контролируемой средой 10. В качестве индикатора 5 можно использовать электронно-лучевой осшшлограф. рлок 7 временного интервала служит для генерации короткого строб-импульса, регистрируемого на индакаторе 5 одновременно с принятым импульсом, и измерения временного интервала между строб-импульсом и моментом излучения в среду, 10 упругого импульса. Один из :вариантов этого блока содержит ждущий мультивибратор 11, измеритель 12 временного интервала, соединенный с мультивибратором, и дифференцирующую цепочку 13, соединенную с измерителем 12, мультивибратором 11 и газдикатором 5, при.этом мультивибратор 11 и генератор 1 соединены сизмерителем 12. В качестве измерителя 12 временного интервала можно использовать частотомер. Инвертор 8 частотного спектра служит для Инверсии частотного спектра принятого электрического импульса относительно частоты fo. Один из вариантов этого блока содержит генератор 14 синусоидальных колебаний, смеситель 15, фильтр 16, соединенный с выходом смесителя 15, один вход которого соед}гаен с генератором 2, а дру;гой вход соединен с генератором 14, генератор U7 синусоидальных колебаний, смеситель 18, :фильтр 19, соединенный с выходом смесителя 18, один вход которого соединен с генератором 2, а другой вход соединен с генератором 17, смеситель 20, полосовой усилитель 21, полосовой фильтр 22, вход которого соединен с выходом смесителя 20, один вхоД: которого соединен ;с фильтром 16, а другой вход соединен с выхо- . дом усилителя 21, вход которого соеданен с приемным преобразователем 6, смеситель 23 и поло- совой усилитель 24. вьссод которого соединен с выходом дополнительного модулятора 9, а вход соединен с выходом смесителя 23, один вход которого соединен с выходом фильтра 19, а другой вход соединен с выходом полосового фильтра 22. Предложенный способ, заключается в следующем.;, - .- Электрический сигнал (фиг. За) преобразует в упругий импульс, который излучают в среду с дисперсией скорости, время задержки сигнала в которой монотонно изменяется при изменении частоты в полосе частот Af электрического сигнала в окрестности частоты fo (фиг.2). 56 При распространении в среде упругий импульс приобретает частотную модуляцию и удлиняется. Упругий импульс принимаюту преобразуют в электрический сигнал, частотный спектр принятого электрического сигнала шшертируют относительно частоты fo, лежащей в его полосе частот. В этом случае выполняется условие: - величина гЩ. для среды райка- i3ti ы О- - От I . в| ДЛЯ сигнала с преобразованным спектром .Модулируют сигнал по амплитуде (фиг. 36) .преобразуют его в упругий импульс и вторично излучают в cpejty. При вторичном прохождении через среду частотная модуляция в импульсе исчезает, все его частотные составляющие в полосе частот Af приходят к ее границе с разность фаз, равной нулю, формируя короткий импульс ; длительностью l/Af. Упругий импульс прИ нимают на том же расстоянии, преобразуют в .электрический сигнал (фиг. Зв) и по его задерж ке относительно момента излучения в среду пер |воначального упругого импульса определяют время задержки to сигнала на частоте fo, кото:рое совпадает с половиной времени задержки |принятого электрического сигнала (фиг. 3, в), :при этом сигнал модулируют импульсом с моугольной огибающей (фиг. 3, б). Устройство, реализующее предложенный способ, работает следующ1 м образом. Генератор 2 вырабатывает синусовдальное напряжение с частотой f j, которое поступает на вход модулятора 4, формирующего на своём йы ходе прямоугольные радиоимпульсы длительностью т (фиг. За), период следования которых задает генератор 1 управляющих импульсов.Радиоимпульс с выхода модулятора 4 поступает на излучающий преобразователь 3, который преобразует его в упругий имПульс и излучает в контролируемую среду 10. Частотно-модулировйнный упругий импульс с частотой поступает на йриемный преобразователь 6, которы преобразует его в электрический сигнал, напряжение которого Поступает на один вход инвертора частотного спектра 8, на другой вход которого поступает напряжение с частотой fj от генератора 2. Генераторы 14 и 17 вырабатывают напряжение с частотами, соответственно, fi4 и fi7v фильтр 16 выделяет частоту fie , фильтр 19 выделяет частоту fj9 f2 + ft7- На даькоде смесителя 20 фильтр 22 выделяет частоту f24 -f2+fi4 fi4 Af/2, а полосовой, усилитель 24 выделяет на выходе сме сйтеля 23 частоту f24 19 - + fi7 - fi4 ± Af/2 fo ± Af/2. Таким образом, инЬертор 8 формирует на своем выходе злектри7 ческии сигнал с инвертированным относительно частоты fo спектром. Если fn fi4, то частота сетнала на инвертора 8 будет f24 2 ± ± Af/2. С выхода шшертора 8 электрический сигнал со спектром fo ± Af/2 поступает на первый вход дополнительного модулятора 9, на второй вход которого поступают управляющие импульсы от генератора 1. Модулятор 9 модулирует амплитуду частотно-модулированного сигнала прямоугольным импульсом и формирует на своем выходе частотно-модулированный импульс, огибающая которого близка к прямоугольной (фиг. 3,6). Электрический импульс с выхода дополнительного модулятора 9 поступает на излучатель 3, который вторично излучает его в среду 10. Упругий импульс поступает на приемный преобразователь 6, с выхода которого электрический сигнал поступает на вход индикатора 5, развертка которого запускается короткими inviпульсамк синхро101заДии от управляющего генератора 1 в момент излучения первоначального упругого имПульса в среду 10. Частотомер 12 измеряет временной интервал между коротким импульсом от управляющего генератора 1, совпадающим по времени с моментом излучения в среду 10 первоначального упругого импульса, и коротким строб-импупьсом, формйг уемым на выходе дифференцирующей цепочки 13 и регистрируемым на индикаторе 5. Измерение времени задержки с помощью устройства, реализующего предпагаемь й способ, осуществляется йтедуюшим образом. Регулировкой частоть генератора 2 устанавливают значение частота f 2, которое соответствует участку с монотонным изменением задержки сигнала в контрШйруембй среде, при этом на вь1ходе инвертора 8 формируется сигнал с частотой fo ± AfA2, п;ричем частота fo лежит в полосе частот fj т Af/2 (в частном случае fo fj при fi4 fj 7)-Регулируют длительность импульса ждущего мультивибратора 11 и совмещают на индикаторе 5 строб-импульс с принятым импульсом, после чего частотомером ГЗизмеряют временной интервал между моментом излучения в среду 10 первоначального упругого импульса и строб-импульсом, величина которого совпадает с удвоенным временем задержки сигнала на частоте f о. В некоторых слзчаях для получения высокой точности измерения достаточно производить -модуляцию сигнала в дополнительном модуляторе 9 в режиме стробировангия по даительностй не вводя двустороннего ограничения по амплитуде, что позволяет значительно упросгть схему модулятора 9 и отстроиться от мешающих сигналов. Однако, когда требуется высокая тбчность (Измерения, необходимо использовать прямоугольный модат1ирующий импульс, так как в этом случае принятый короткий импульс будет иметь наименьшую дайтельностьпо с рйвнён1Ш с частотно-мОдуййрованным импульсом, модулированным например, импульсом с гауссовой огибающей. Точность предлагаемого способа не зависит от величины К и зависит от величины Af, в которой урегля задержки монотонно йзменлется при изменении частоты. Ошибка измерений обратно пропордаоиальна величине Af. В этом случае, когда функция для среды отличается от линейной,.ошибка измерений возрастает. Одна- ко, если функция t (f) симметрична относительно точки измерегай, например, имеет вид t(f) ,. , , BO + AT arctg- , где ао - постоянная состав Af ляйщая, или имеет периодическую модуляцию относительно прямой t(f) kf + ао , то эти искажения вызовут только расширение принятого импульса и уменьшение его амплитуды, но врем задержки импульса останется неизмененным. Такие же искажения короткого импульса бyпy происходить и в том случае, если величина К для .частотно- модулированного импульса на выходу приемного преобразователя 6 незначительно отличается по модулю от величины К для частот но мбдуЯйрОйаннбго импульса на выходе излучателя 3. Указанные зависимости t(f) характерны для большинства акустических волноводов и для ряда веществ на высоких частотах в определенных частотных диапазонах. Предлагаемый способ позволяет значительно увеличить (в несколько раз) точность измере; ния в ремени задержки, что. Позволяет более эффективно Тсонтрйлировать параметр среды, нап| ймер а1 устическИе параметры волноводов. Формула изобретения 1. Способ измерения времени задержки сигнала в среде с дисперсией скорости, основанный .на преобразовании электрического сигнала в упругий импульс, излучении последнего в среду приеме его и преобразовании в электрический сигнал, отличающийся тем, что, с целью повыше1шя точности измерения, инвертируют частотный спектр принятого электрического сигнала относительно заданной частоты, модулируют сигнал по амплитуде, преобразуют его в упругий импуЛьс, повторно излучают в среду, принимают на том же расстоянии, преобразуют в электрический сигнал и по его задержке относительно момента излучения в среду первоначального упругого импульса судят о временизадержки сигнала на заданной частоте. 2. Устройство для осуществления способа по п. I, содержащее генератор управляющих им.. . f, , , пульсов, генератор синусоидальных колебаний, излучающий электромеханический преобразователь, модулятор, один вход которого соединен с генератором синусоидальных колебаний, другой вход соединен с генератором управляющих импульсов,, а выход соединен с излучающим электромеханическим преобразователем, индикатор, соединенный с генератором управляющих импульсов, приемнь1й электромеханический преобразователь, соединенный с индикатором и блок временного интервала, соединенный с индикато.ром и генератором управляющих импульсов, отличаюц1ееся тем, что в него введены инвертор частотного спектра и второй модулятор, причем первый вход второго модулятора соединен с генератором управляющих импульсов, второй вход соединен с выходом инвертора частотного спектра, а выход соединен с излучающим электромеханическим преобразователем, первый вход инвертора соединен с генератором синусоидалъньис колебаний, а другой вход подключен к приемному преобразователю. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N 460492, кл. G 01 N 29/00, 1974. 2.Журнал The Journal of The Acoustical Society of America, vol. 35, N 5, 1963, p.p. 712-713.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой виброметр | 1986 |
|
SU1408239A1 |
| Устройство для автоматической регистрации параметров жидких сред | 1990 |
|
SU1704061A1 |
| Устройство для измерения скорости ультразвуковых волн | 1986 |
|
SU1384961A1 |
| Способ определения дисперсионной характеристики среды | 1973 |
|
SU460492A1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2205421C1 |
| Устройство для одновременногоОпРЕдЕлЕНия СКОРОСТи РАСпРОСТРАНЕНиязВуКА B СРЕдЕ и СКОРОСТи дВижЕНияСРЕды | 1979 |
|
SU830234A1 |
| Ультразвуковой доплеровский измеритель скорости кровотока | 1990 |
|
SU1810042A1 |
| Устройство для телевизионной игры | 1977 |
|
SU736992A1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПО РАДИОЛУЧУ | 2003 |
|
RU2249229C2 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 1993 |
|
RU2038614C1 |
,
p---
(PU9.2
.. ,,.. -.7.. .. .. ;,690377
