(54) СГОСрБ ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНЫХ СЙтАЛОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ | 2014 |
|
RU2584456C2 |
| Устройство сопряжения телефонной станции с импульсным каналом связи | 1987 |
|
SU1450138A1 |
| Способ передачи видеоимпульсов цифровой информации | 1987 |
|
SU1425837A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДЕМОДУЛЯЦИИ КАНАЛЬНОГО КОДА | 2012 |
|
RU2521299C1 |
| Устройство тактовой синхронизации | 1987 |
|
SU1555892A1 |
| Цифровой адаптивный корректор сигнала с парциальным откликом | 1982 |
|
SU1073890A1 |
| Устройство для приема биимпульсного сигнала | 1986 |
|
SU1372628A1 |
| МНОГОКАНАЛЬНАЯ АППАРАТУРА ПЕРЕДАЧИ ДАННЫХ | 2009 |
|
RU2406121C2 |
| Устройство для приема сигналов с парциальным откликом | 1983 |
|
SU1117855A1 |
| Устройство для передачи и приема цифровых сигналов | 1986 |
|
SU1415452A1 |
Иэобретейие относится к способам передачи и обработки цифровбй информации и может быть использовано при со прй севив источников Цифровой инфор otce с Мн6го|санальны ми системами связи, а tetKsKe при построении автоматизироввввых систем угфавпец я с коплектйвйым доступом к ЦВМ.X
Йзвестрь cTtocoQbj , fJ-l. о€еспечива10швв обмен спужебш 1миснгвапвмв между всточнескам цифровой внформаани в ИВМ.
ГТрн атом в ачесч ® слу 1{||1бщ,1х свгвалбв испольауютсй эе) в сюновном (1вфорь«а1р(и0нв6м сигнале кодопие комбшацвв. Это орраавчивавт нокюйиц туру служебных сйгвапов, а епедова- тельно в объем nepeaaaieteMofi Шформацни;
Неибояее близким по техннчес1 й сушкости к изобретению является ситсоб Передачи и приема дискротных ситшлов, котором формируют иоспедоватеяьвость Ввфор1и&ий6нвых бивывульЬных сигналов к носпедователыгостъ слу( импуйьснврс сагнапой, оачу поспедоватетлостей вйформа аионйых бннмпупьсйых евпшлов червдуйзт с передачей посйедоватепыюстей служебных импульсных сигналов, ри приеме осуществляют тактрвую c Bixpoнизадшо по првнимае1уп тм информационным сигналам (2Х
Недостаткам такого способа является низкая достоверность передачи и qrpiHeiMa иа |юрмайив.
Целью изоб югения является пов1,. вие AocToeepBocitr передачи и првемв1 информации.
Пост« вш нраа цель достигается тем, что по п|редло}йешому способу, ttocnenoаателыаость служебньпс Импульсов сиг
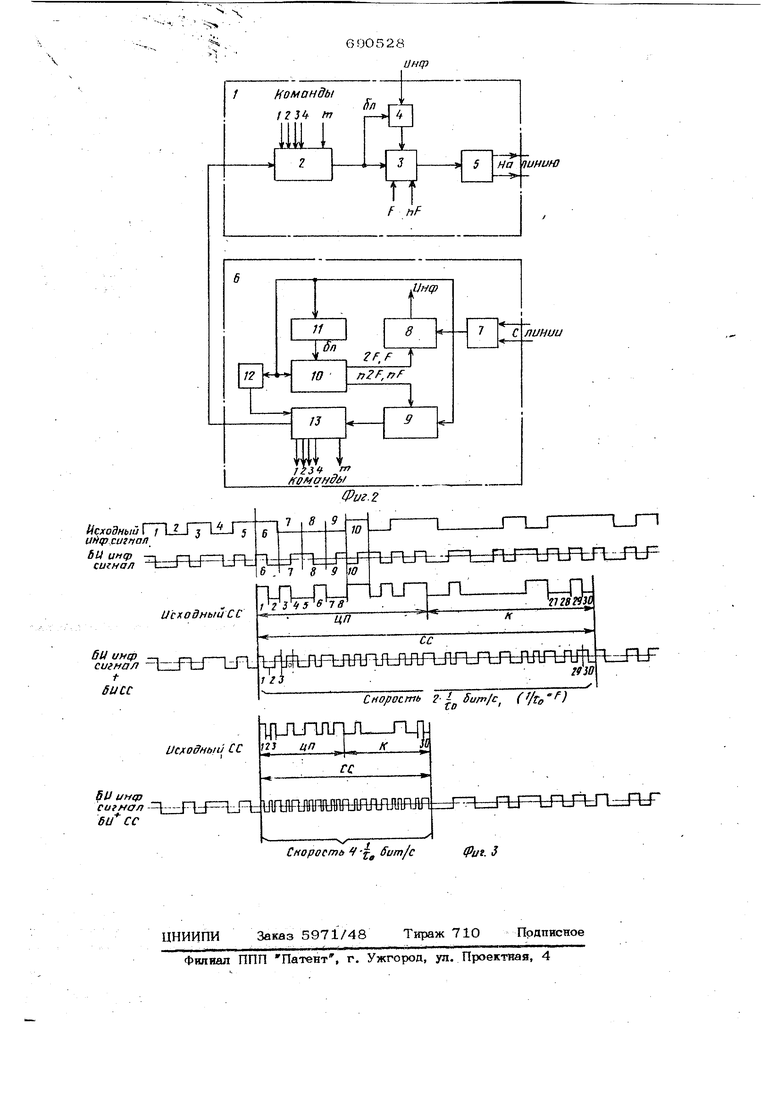
налов формируют :б%вМПуЛЬСНЬ Й При 8ТОМчастота служе ох биимуЛь вых с|ггта кратное чвсло раз превь|шв8т чесtcfey геформааИовш к бнимпу льсиых с гваш в, а длительность служебных Tsocfteоователшостей биимпупьсных сирвалов не --Превышает интервапа синхронизации. На фиг. 1 изображены временные диаграммы, поясняющие принцип биимкупьсного перекодирования; на фиг. 2 вариант схемы устройства, реализующего предлагаемый способ передачи слу жебных сигналов; на фиг. 3 - временны диаграммы, по которым формируются суммарные сигна.лы, содержащие основной информационный и служебный сиг налы (СС).; Применение предлагаемого способа передачи служебных сигналов обосновано двумя причинамигБО-первых, широкой .полосой частот, пропускаемой кабельны ми соединительными линиями, во-вторых, избыточностью по количеству характеристических моментов синхронизации (смен полярностей сигнала), которая имеется в биимпульсном сигнале. Соединительные кабельные линии имеют протяженность, не превышающую нескольких километров. Дополнительное частотное уплотнение коротких линий экономически невыгодно, поэтому по одной паре линии, как правило, передаю ся сигналы одного канала. В результат в диапазоне передачи данных имеем большой запас по ширине полосы частот пиний по сравнению с полосой, занимае мой сигналом. Ширина полосы частот, занимаемая сигналом, для этих условий не является определяющим фактором Поэтому,хотя увеличение скорости при передаче служебных сигналов и требует расширения занимаемой полосы частот, оно допустимо на соединительных линиях. Биимпульснбе перекодирование осуществляется следующим образом. На фиг. 1 изображены: исходш 1й сигнал (ИС) на передаче - первая стро ка, биимпульсный СИ тал (BJOi получен ный после перекодирования - вторая строка, тактовые импульсы i , фиксн рукщие полярность посылок биимпуяьс.о в декодирующем устройстве приемника, два варианта работы декоднрукннёго уст ройства (декодирование 1 и декодирова ние 2) и исходный сигнал, полученный поспе декодиро;вания (два варианта cooi ветственно). Одноименные Посыпки исходного бинарного сигнала и соответствующие им биимпульсы и промежуточные сигналы в декодирую1цем устройстве провумеро- ваны одинаково. 8 .4 Каждому символу на передаче после перекодирования соответствует один би- . импупьс, состоящий из двух импульсов разной полярности (10или 01). Как уже говорилось, порядок смены полярностей в биимпульсе, или его фазе, зависят от того, какой символ (1 или О) передавался перед ними. Если передавалась , порядок смены полярностей одинаковый, если - О , порядок противоположный. Благодаря относительности кодирования декодирование можно начинать с любого из двух импульсов, составляющих биимпульс. в первом варианте цекодиро- вания, изображенном на .фиг. 1, оно осуществляется с первого импульса, во вто- . ром варианте - со второго. При декодировании полярность импуль сов фиксируется тактовыми импульсами 4. (декодирование 1,2 - первая строка) и запоминается на один такт Т,, ( tp длительность элементарной посылки информации) до следующей фиксации, (Положительной полярности соответствует вьюокий уровень, отрицательной - низкий) . Далее зафиксированное значение полярности задерживается еще на один такт t, (декодирование 1,2 - вторая строка) и сравнивается с вновь зафиксированным значением, следующим по очереди (сравниваются полярности первой и второй строк). Если полярности одинаковы, формируется единичный символ исходного сигнала, если полярности противоположны - нулевой символ. Как видно из фиг. 1 сигналы после декодир.ования в первом и втором вариантах одинаковы, но в зависимости от фазы tj могут иметь два начальных фазовых положения, сдвинутых один относительно другого на 0,5 Т . Возможность равноценного декодирования в двух фазовых положениях позволяет вести тактовую синхронизацию на частоте, в два раза более высокой, чем F s 1/ т, , и из двух фазовых положений ti выбирать случайным образом любое, получаемое при делении удвоенной частоты следования подстроен- ньгх синхронных и синфазных импульсов 2F с1/Тб пополам. Благодаря возможности синхронизации по частоте 2 биимпульсное кодирование помимо избыточности по информации (два импупьса иа один исходный бинарный) обеспечивает избыточность и по характеристическим мо1уюнтам синхронизации. в биимпупьсном сигнале минимальна плотность спедования моментов стссронизации не ниже максимальной для би(юрного сигнала. Если сравнивать среднюю плотность характеристических моментов синхронизации бинарного и биимпульсного сигналов, то у последнего она минимум в восемь рез выше. Можно сократить число коррекций (фазы, частоты) на приеме (одна коррекция может приходиться на одну смену поляризации) более, чем наполовину. Устойчивость тактовой синхронизации позволяет без ущерба для качества синхронизации блокировать ее при возраста нии скорости передачи служебных сигналов и принимать основной информационный сигнал и служебные сигналы на один приемник с общим устройством тактовой синхронизации. Процент исключаемых из синхронизации характеристических моментов синхронизации отфеделяет допустимое коли чество служебных сигналов, передаваемое в единицу времени. Если исключить 30% синхронизирующих моментов, то для скорости 1200 бит/с, это составит около 400 знаков в секунду длительностью т на служебные сигналы. С учетом, например, удвоения скорости при передаче служебных сигналов эта цифра удвоится и будет равна 800 знакам длительностью То/2. ЕСЛИ выделить на служебный сигнал ЗО знаков, то в 1 с. можно передать более 25 команд. При равных условиях для скорости 24 00 бит/с получим возможность передачи более 50 ко манд в 1с, для 4800 бит/с - более 100 команд в 1 с, и т.д. Реально требуемый темп обмена командами незначительно возрастает с ув личением скорости. Необходимая скорос обмена примерно постоянна и равна 1О-15 команд в I с независимо от скорости передачи, поэтому при возрастании скорости передачи потери пропускной способности и синхронизирующи моментов снижаются. Рассмотрим вариант структурной схемы устройства дпя передачи и прием служебных сигналов, реализующего пред лагаемый способ (см. фиг.2). Передатчик 1 содержит формировате служебных сигналов 2, кодирующее 28 устройство 3, клапан 4, выходное устройство 5. Приемник 6 включает в себя входное устройство 7, устройство регенераЦии и декодирования биимпульсных сигналов основной информации 8, устройство регенерации и декодирования биимпульсных сигналов служебной ин-, формации 9, устройство дискретной автоматической подстройки фазы тактовых импульсов (ДАПФ) 1О, анализатор соотношения сигнал/помеха 11, анализатор скорости 12 и декодер служебных сигналов 13. Работает устройство следующим образом. При передаче заявки на передачу служебных сигналов .(команд) поступают параллельно по m входам на формирователь служебных сигналов. С помощью кольцевого распределителя вхоДяшего в состав формирователя служебных сигналов, входы поочередно опрашиваются. ЕСЛИ запрос на передачу по данному входу не поступил, производится опрос очередного. При наличии запроса распределитель останавливается, и формируется служебный сигнал. Темп сброса должен быть выбран так, чтобы служебные сигналы распределялись равномерно во времени в соответствии с необходимым темпом обмена служебными сигналами. Скорость формирования отдельного служебного сшнала должна соответствовать скорости его передачи. Служебные сигналы и основной информационный сигнал поступают на кодирующее устройство 3, где из бинарного формируется биимпульсный сигнал. Причем основной информационный сигнал подается через промежуточный клапан 4, на блокирующий вход которого поданы служебные сигналы. При передаче служебного сигнала основной информационный сигнал блокируется.. Управляют кодированием тактовые последовательности импульсов F и яК : первая - кодированием основного информационного сигнала, вторая - кодированием служебных сигналов. С выхода кодирующего устройства 3 суммарный сигнал поступает на выходное устройство 5 и затем в линию. Для большей универсальности цикловое фазирование при передаче служебных сигналов необходимо организовать по стартстопномупринципу (см. фиг.3)т.е. цикл передача и приема должен формировоттхгя для каждого (;/1ужебиого сигнала отдельно. Служебный сигнал должен состоять из двух частей: цикловой посыпки (старт) в командьь йнкповдя посылка (ЦТ) предшествует команде (К) и определяет ее начало. На ф«гг. 3 изображены два вврв1анта формировйнсгяг: первый япя передачи спужебйых сйт налов со скоростью 21 (удаоеннс У, второй дп) передачи со скоростью 4F (учетаеренной). Видно, что Чем выше скорость передачи служебных сигналов, тем меныпе по-гери ПрОПуСКШ в СПОСОбВОСТВ для OCH00BOt4 сигнала и потери для характеристических моментов сшхронкдаций, и тем выш теки служебными сигналами кюж ио допустить. Првведенаый метод цикло вого ч|взиробавйя не единственно юзмо ный. Очевидно, что допустюлы и другда решевм для виклового фазирования. В cBsrae с -тем, что Полоса частоты канапа Гораздо mtipe волосы частот, за- йвмаемой сигналом, вероятны йскаже- Нйя в виде дроблеегий, которые могут восприниматься преемвиком, как уиеяичейие скорости, отличать служебные сигналы va фоне йробйешдас посмяок основного пформагаютюго cm Raita я одновременво обеспечить высокую достоверность их приёма яри вязких соотношениях сигвал/шмеха, кодирование необходимо деяать избытотеым. Должно быть иредус трвно о&аружевш ошибок либо о аружебие в нбправ ннФ ошибок. В рассмотренном йм Шё вр1сме| е и на поясняющей. в|юмешой ШЕаграммэ ;{фиг.З) требуемая избыточаость учйтываеося , что ва каждый служе К||й выделяется тршадать юшв. С учетом требований по тюмехоустовч1юост11 дтого количестваДоста точво для формсфованшя весЕЯ лькш: Де сятков раэпетаеко с по составу комавд. При 1фвееме сигйал с яиивй поступае швх:ош1ой усилитель 7 приемника 6. С бь|кода усйлитеда 7 он водаечгся варал««вЛ1 о ва ст{Х Йства1.8, устройство 9 ДАПФ 10, atsani t« p собт&ошёвйя CHfяал/тюмеха It it анализатор скорости 1 АяаАвэатор соотисшенвя Ьвгвал/пб меха 11 в ДАПФ 1О совместно образую уст| ЙсТво такгговрй сшгхроеаэацвв грв емвяка.. : ; ;. ., , Перблача служебных сигналов ирбДпагаемым методом не требует слваяаль 8. , него усложнения устройстпа тактовой синхронизации. Синхронизация осущест- рляется на частоте 2F по биимпупьсному сигналу, но при этом в ДАПФ Ю помимо подстроенных поспедовательно- стей тактовых импульсов- с частотой следования 2F и Р для устройства 8 заодно формируются более высокочастотные сигосроншые и синфазные с приНймаемымн служебными сигналами поспедовательностн тактовых импульсов с Частотой следования п- 2F и nF для устройства 9. Так как вероятны дробления, анализатор сигнал/помеха 11 независимо от того передаются или не передаются служебные сигналы должен содержать аиапйзатор дроблений. Увеличение скорости передачи эквивалентно дроблению ncfcibiiioK, nosToKiy оно выделяется анализатором дробления. В результате сигналы с выхода аналйза-юра дроблекнй блокируют синхронизанкю во время передачи спужеб|Ых сигналов. В анализаторе скорости 12 фиксируются сигналы, длительность посылок которых много больше, чем максимальная длительность посыпок служебных сигналов. При Каждом обнаружении более длинных посылок информации работа декодера служебных сигналов 13 блокируется сигналом с выхода анализатора скорости 12. Обмен служебными сигвапамв может быть оргавйзовай по принципу командаквитанШ Я (запрос-ответ). В этом случае после каждой {финятой комаПпы в декодере служебных сигналов должен формироваться управляющий сшивая, додаваемый на формирователь сяужейгых сигналов. По этому сигйалу в формирователе вырабатывается передаваемый в лшню служебный с$ггдал-квиташ ия. Применение п|редлагаемого способа 11ередачи служебных сигналов обеспечивает практвЕчески полную автово1 ность. бопрягаемых аттаратов. Работакянш друг на друга вйкй atrtmратуры с рбДйвшотся tto четырехароводвому стыку, уилот веайЬму не только информацвоввыми в тактовыми сигналами, но .с &эльшйм объемом служебной янформаций. Это дапьвейшеё расшвршве возможнойтей cTbjKa , рекоКювдуекюго ОСТ4.208.О02. Сопряжение, обеспечивающее автономность работы смежаьос устроите. обеспечивает одновременно автономность их разработки, изготовления, настройки, проверки, ремонта и универсальность использования. При этом упрощается любая модернизация отдельных аппаратов, так как это не сказывается на соседних устройствах. В готовых системах появляется возможность расширения номенклатуры применяемых устройств и возможност замены части устройств на без переработки оставшейся части. . Кроме того, значительно сокращается время на согласование параметров сопря жения, Формула изобретения Способ-передачи и приема дискретных сигналов, при котором формируют последоватепьно ;ть информационных биимпупьс ных сигналов и последовательность служебных импульсных сигналов, передачу последовательностей информационных бибисигнал
,
{риг.1 импульсных сигналов чередуют с передачей последовательности служебных импульсных сигналов, при приеме осуществляют TajfTOByTo синхронизацию по принимаемым информациош ым сигналам, отличающийся тем, что, с целью повышения достоверности передачи и приема информации, последовательность служебных импульсных сигналов формируют бнвмпупьсиый, частота сигналов которой в кратное число раз превышает частоту информационных биимпульсных сигналов, а длительность Ьлужебных последовательностей биимпульсных сигналов не превышает интервала синхронизации. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 433480, кл. GOe.lT 9/(ЗО, 2.Аппаратура передачи данных, параметры сопряжения аппаратуры с физическими линиями на стыке С1ФЛ. ОСТ4,208.0О2,1975, (прототип).
f,
UHipfutrian 6и иНСр -: сигнал исходный СС бИ имф сигнал ПЧ ЦП V Ucfodntiiu СС
би UHtp
сигнал - 1--R-F R-i би СС
CHopoemt, У - Sum/c(рцг. S
чинию
линии гтть iiFtF Спорость 2i Sufn/c С/Тд к i
