Способы определения координат движущихся в потоке объектов, осуществляемые путем измерения скоростей и траекторий гидрокинематических индикаторов фотокинематографическими приемами, известны, причем с целью получения пространственных координат движущихся объектов движение последних фиксируется одновременно при помощи двух фотографических камер, устанавливаемых в двух взаимноперпендикулярных плоскостях или путем стереофотосъемки. Оба эти приема сложны и обработка двух полученных фотограмм требует применения стереоприборов.
Предметом изобретения является способ фотографирования взвещенных в потоке и движущихся с ним объектов, освещенных двумя расположенными на известном расстоянии друг от друга источниками света, заключающийся в том, что, с целью автоматического получения на фотографическом снимке данных масщтаба для определения действительных значений координат объекта съемки по
координатам расположения его теневых изображений на снимке, производят предварительно съемку транспарантной щкалы, выполненной в виде непрозрачной пластины с рядом равно отстоящих отверстий. Эту пластину устанавливают в поле зрения фотографического аппарата под углом к картинной плоскости в пространстве, где должен быть расположен объект съемки, и путем сравнения величины расстояний между теневыми изображениями объекта съемки на рабочем снимке с таковыми на снилже транспарантной щкалы определяют истинные значения координат объекта съемки в момент экспозиции.
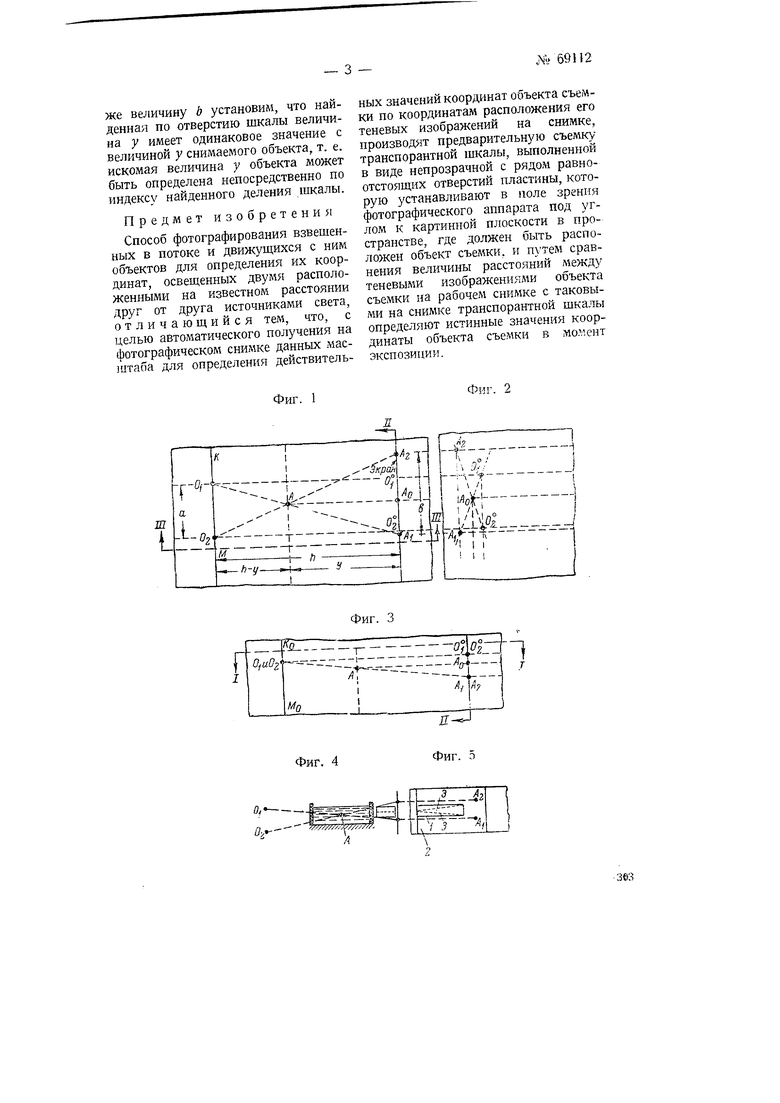
На фиг. 1, 2 и 3 изображена принципиальная схема установки для осуществления предлагаемого способа в разрезах по линии /-/ (фиг. I), линии //-// (фиг. 2) и линии ///- /// (фиг. 3), на фиг. 4, 5 и б - примерное конструктивное оформление этой схемы.
Два источника света 0 и 0. расположены в одной вертикальной
скости так, что центры их, лежащие на одной вертикали КМ, находятся один от другого на расстоянии а. В плане центры источников света совпадают и находятся на линии , параллельной плоскости экрана, расположенного по линии //-//.
Пусть в пространстве Л1ежду источниками света и экраном движется какой-нибудь объект, наприл1бр, частица А, тогда на экране получим в момент вреА1ени два теневых изображения Д и Лз этого объекта с расстоянием между ними равным h.
Расстояние у or объекта А до экрана определится из соотношения
где /г - расстояние от линии центров источников света до экрана.
Таким образом измерив величины а, д и /г, определим у - одн}- из координат объекта А.
Для определения двух дрз-тих координат объекта А необходимо спроектировать положение его в пространстве на плоскость экрана. Ид1ея на экране два теневых изображения Аи Ау объектов А и А и ортогональные проекции О. и на экране центров источников света 0- и 0, соединяют линиями проекции центров с соответствующими изображениями А- и Лз- Точка пересечения этих линий Ло и будет местоположением на экране ортогональной проекции объекта. Таким образом, все три координаты объекта легко определяются на экране или на светочувствительной пластинке, поставленной вместо экрана, если на экране имеются два теневых изображенш объекта и известно на нем местоположение проекции центров источников света и величины /г, а и Ь, причем h vi а для одного и того же положения экрана и источников света постоянны. Величины avi b измеряются непосредственно на экране или фотоснилще.
Установив сзади экрана фотоаппарат,, ось объектива которого при съемке должна быть установлена норл ально к экрану, а плоскость прикладной рамки в нем параллельно
302
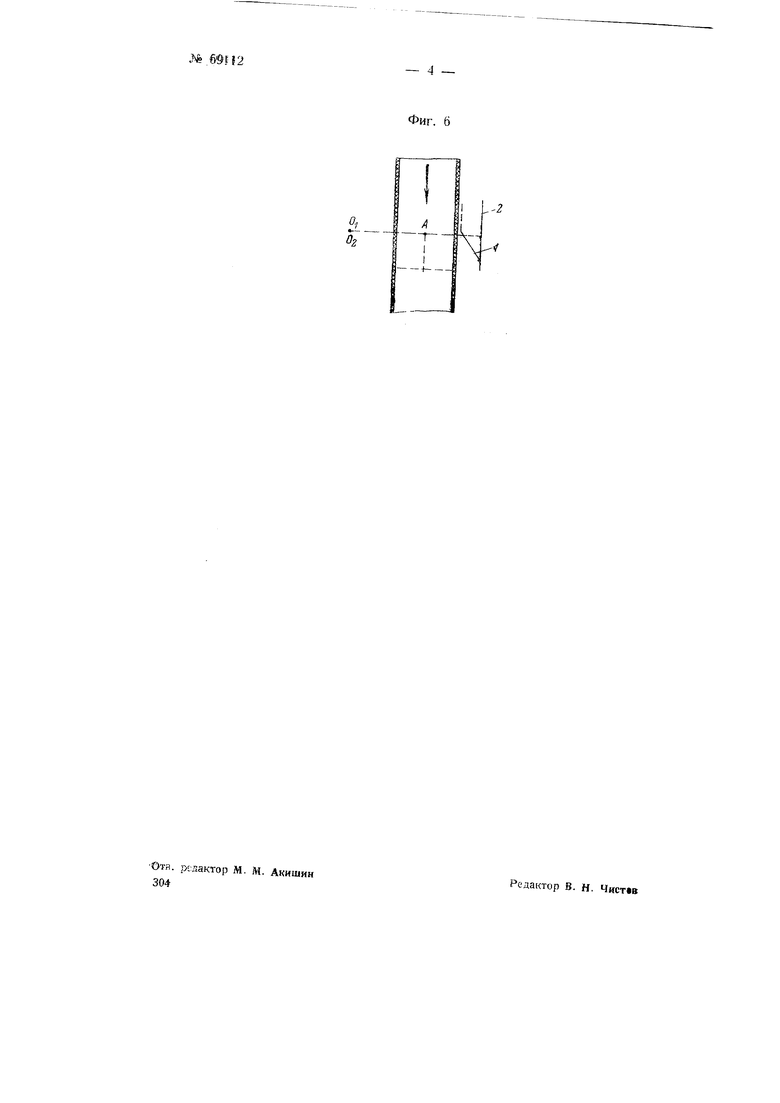
экрану или киноаппарат люжнизображение объекта получить и на обычную фотобумаг}- или пленку в уменьшенном виде учтя при обработке фотограмм лшсштаб съемки. Для этого фотографируют шкалу которая представляет собой металлическую линейку / (фиг. 4-б) с отверстиями расположеннылш точно на заранее выбранных расстояниях, и индексами против каждого отверстия. Линейка вращается в рамке 2 на оси, прикрепленной к одному концу линейки, в результате чего последняя может устанавливаться к под различным углом а. Прикладывая линейку рамкой к экрану или фотобумаге fустанавливая тем самым шкалу под углом, всегда получим прямоуго.шный треугольник, у которого гипотенузой будет служить шкала (линейка), а ОДНШ1 из катетов - перпендик3ляр, мысленно опущенный с конца шкалы на плоскость основания рамки или экрана. Зная расстояние между делениялш шкалы, можно определить при заданном угле расстояние каждого отверстия от основания рамки.
Пусть, например, угол наклона шкалы 30, тогда при шкале длиной 200 мм, длина катета (или расстояние последнего деления от основания) будет равна /00 мм. При делениях, нанесенных на шкале через 2 мм и угле наклона последней в 30, удаление каждого последующего деления от предыдущего, считая по нормали к основанию прибора, равно 1 мм. В результате фотографирования такой шкалы, состоящей из ряда отверстий, при наличии двух источников света на фотоснимке получаются двойные изображения всех идентичных отверстий в виде светящихся точек 3. Располагая прибор в области движущихся частиц объектов, получим на экране как двойные изображения этих отверстий в виде расходящихся рядов точек, так и двойные изображения самих объектов. Зал1ерив на экране величину b для каждого объекта и найдя по двойному изображению шкалы прибора, то ее деление, изображение которого отстоит дру/ от друга на ту
же величину b установим, что найденная по отверстию шкалы величина у имеет одинаковое значение с величиной у снимаемого объекта, т. е. искомая величина у объекта может быть определена непосредственно по индексу найденного деления шкалы.
Предмет изобретения
Способ фотографирования взвешенных в потоке и движуш,ихся с ним объектов для определения их координат, освещенных двумя расположенными на известном расстоянии друг от друга источниками света, отличающийся телг, что, с целью автол5атического получения на фотографическом снилже данных масштаба для определения действительФиг. 1
ных значений координат объекта съемки по координатам расположения его теневых изображений на снимке, производят предварительную съемку транспорантной шкалы, выполненной в виде непрозрачной с рядом равноотстоящих отверстий пластины, которую устанавливают в ноле зрения фотографического аппарата под углом к картинной плоскости в пространстве, где должен быть расположен объект съемки, и путем сравнения величины расстояний между теневыми изображениями объекта съемки на рабочем снимке с таковыми на снимке транспорантной шкалы определяют истинные значения координаты объекта съемки в момент экспозиции.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ МЕТАЕМОГО ОБЪЕКТА | 2011 |
|
RU2470311C1 |
| СПОСОБ МАСШТАБИРОВАНИЯ СНИМКОВ ФОТОПЛАНИМЕТРИЧЕСКОЙ СЪЕМКИ ГОРИЗОНТАЛЬНЫХ ГОРНЫХ ВЫРАБОТОК | 2020 |
|
RU2791080C2 |
| Способ определения формы рельефа поверхности | 1989 |
|
SU1793221A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА ИСПЫТАНИЙ В ВИДЕ ТЕЛА ВРАЩЕНИЯ С ИЗВЕСТНЫМИ ГЕОМЕТРИЧЕСКИМИ ПАРАМЕТРАМИ | 2013 |
|
RU2536096C1 |
| Способ освещения и фотографирования следов заряженных частиц в трековых камерах | 1978 |
|
SU717682A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПРЯМЫХ ЛИНЕЙНЫХ РАЗМЕРНЫХ ПРИЗНАКОВ ФИГУРЫ ЧЕЛОВЕКА | 2004 |
|
RU2264768C1 |
| ФЛЮОРОГРАФ | 1948 |
|
SU74296A1 |
| Способ определения пространственных характеристик тела человека и устройство для стереофоторентгенографии | 1987 |
|
SU1565482A1 |
| КОМПЬЮТЕРНЫЙ СПОСОБ ФОРМАЛИЗАЦИИ РАСТРОВЫХ ЦВЕТНЫХ ИЗОБРАЖЕНИЙ ПОВРЕЖДЕНИЙ | 2002 |
|
RU2231288C2 |
| Фотопротрактор | 1953 |
|
SU103463A1 |
Фиг. 4
Фиг. 3
Фиг. 5
А--
Фиг. 6
-2
