(54) ВЕНТИЛЬНЫЙ ДВИГАТЕЛЬ

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1264269A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Вентильный двигатель | 1983 |
|
SU1081753A1 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
| Электрический генератор | 1986 |
|
SU1372515A1 |
| Вентильный электродвигатель | 1984 |
|
SU1272413A2 |
| Датчик положения для управления вентильным электродвигателем | 1974 |
|
SU663035A1 |
| Вентильный электродвигатель | 1985 |
|
SU1350774A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
Изобретение относится к электротехнике и может быть использовано при разработке электрических машин постоянного тока с бесконтактной коммутацией для систем электропровода., Известны вентильные электродвигатели (ВД), у которых чувствительные элементы датчика положения ротора соединены с управляющими цепями ключей коммутатора через функциональ ный преобразователь (логическую схему), преобразующими трехфазную после довательность однополярных импульсов :длительностью 180 эл.град. в две трехфазные последовательности импуль сов длительностью 120 эл.град.1. Недостаток известного двигателя состоит в невозможности сохранения опережающего включения секций (опере жающей коммутации) при раверсе двигателя. Известен также реверсивный вентил нчй двигатель, который содержит пртканальный функциЪнальный преобразова , служащий для преобразования последовательностей выходных,импульсов датчика положения ротора и выполненный в виде п групп логических блоков по га в каждой группе, каждый из которых СОСТОИТ из узлов, содержащих две трехвходовые cxei« i И, причем одноименные схемы И, принадлежащие к разным узлам, образуют комплект правого и левого вращения, два управляющих входа схем И соединены с соответствующим выходами формирователей ДПР, а одноименные ..третьи входы схем комплектов Пра.вого и левого вра-. щения соответствейно объединены 2. ; в известном устройстве информация на третьи входы схемы И с управляющего устройства поступает одновременно с командой реверса двигателя,. т.е.опережающа я коммутацию секции, устанавливается как-при прав.ом, так и при левом направлении вращения. --. Однако в переходных режимах, т.е. при подаче команды на реверс, когда скорость двигателя уменьшается по величине, но еще не изменила своего знака (режим противовключения), ВД работает с отстающей коммутгщией, :и7 следовательно, имеет плохие механические и энергетические характеристики. Происходит это потому, что командой реверса одновременно переключаются цепи управления углом сдвига к-оммутагщи и производится перевод двигателя в режим противовключения. При этом угол сдвига коммутации является опережающим по отношению к .новому направлению вращения, а по отношению к прежнему направлению, сохраняющемуся в режиме торможения до нулевого значения скорости, он является отстающим. Отмеченный недостаток особенно проявляется, если режим противовключения встречается часто, а инерция нагрузки двигателя велика.
Кроме того, при использовании ВД в системе пропорционального регулирования (когда скорость или момент вращения регулируются ппопопционально величине сигнала управления) необходимы пороговые элементы, реагирующие на амплитуду и полярность сигнала управления. Так как эти элементы срабатывают и отпускают при конечных величинах сигнала управлени то неизбежно появление зоны нечувствительности и гистерезиса в регулирвочной характеристике ВД.
Таким образом, второй недостаток известного ВД заключается в невозможности обеспечения приемлемых регулировочных характеристик ВД.
Целью изобретения является улучшение энергетических и регулировочных характеристик вентильного двигателя в переходных режимах.
Для этого вентильный двигатель снабжен определителем направления вращения (ОНВ), информация с которого о направлении вращения непрерывно выдается на управляющие входы функционального преобразователя. Введение такого блока в ВД обеспечивает опережающую коммутацию секций СМ независимо от направления вращения и режима работы БД.
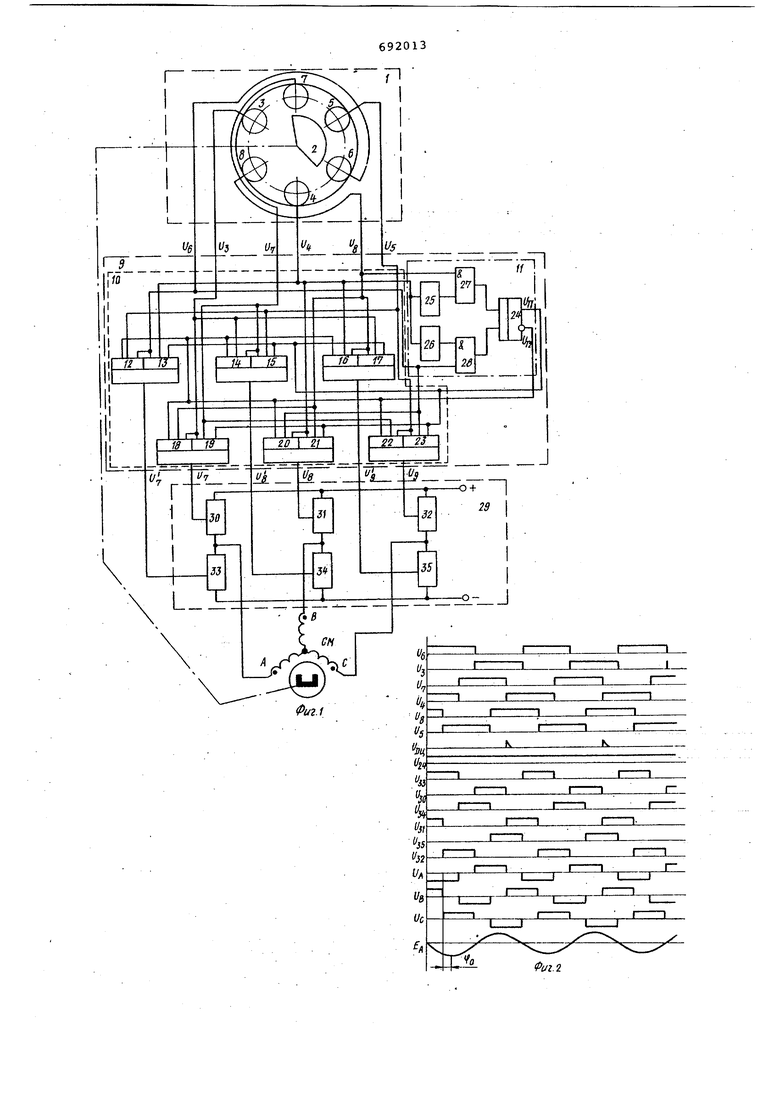
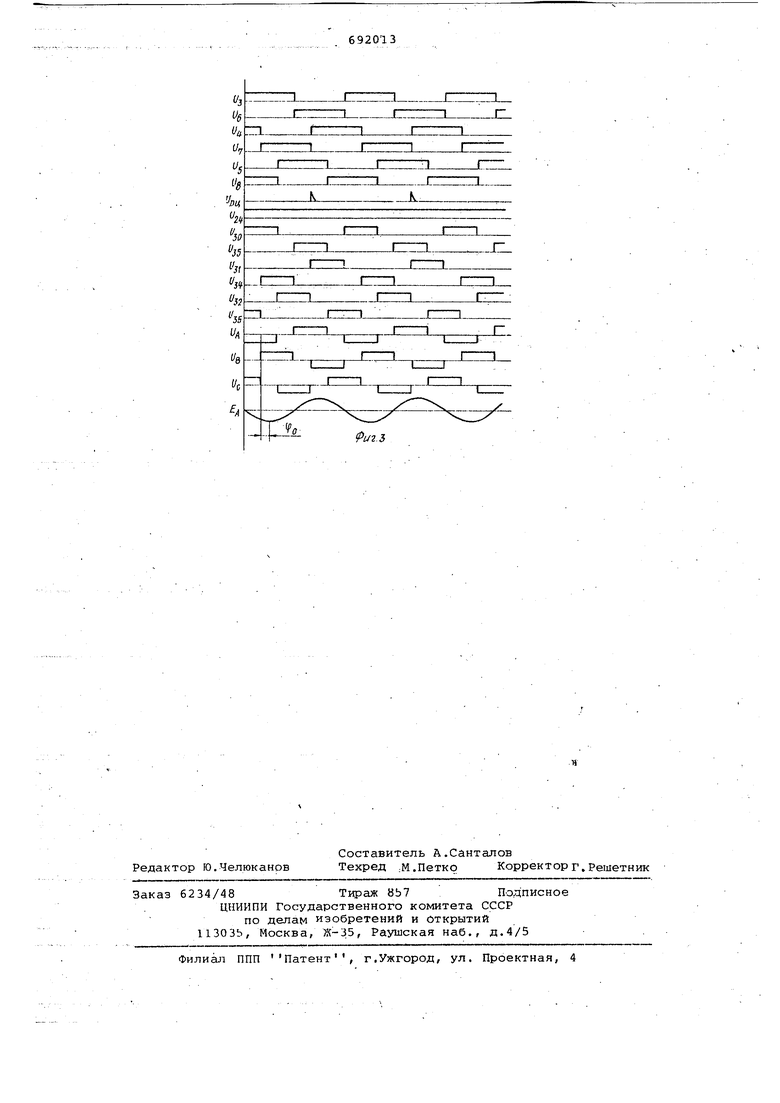
На фиг.1 (приведен вентильный двигатель, принципиальная схема; на фиг.2 и 3 - диаграммы напряжений при правом и левом направлениях вращения двйгателя. ,
Рассматривается вентильный двигатель с трехсекционной синхронной машиной, при этом приведенные здесь соотнощения справедливы для т-секционной машины, где m 2,3,4,5 и т.д.
i.B состав ВД входит также датчик положения ротора (ДПР), конструкция и принцип действия которого могут быть любого типа, поэтому на фиг.1 ДПР показан условно примен.ительно к наиболее простому двухполюсному двигателю.
Вентильный двигатель содержит ДПР 1, имеющий сигнальный элемент 2 и два комплекта чувствительных элементов , образованных чувствительными элемента:ми 3-5 и 6-8 соответственно,,каждый комплект формирует последовательность импульсов длительностью 180 эл.град. Количество комплектов в общем случае определяется числом групп преобразователя частоты (ПЧ) (коммутатора). Поскольку наиболее выгодна двухполярная коммутация секций с углем ЗбО/т эл.град., где m - число секций, то в данном частном случае ПЧ должен содержать ветвей и групп.
Сдвиг между соседними импульсами чувствительных элементов одного комплекта составляет 360/т эл.град., сдвиг между последовательностями импульсов, образованными соседними комплектами, составляет 36О/п эл.гра
Предполагается, что каждый датчик формирует прямоугольные импульсы с крутыми фронтами для обеспечения нормального режима работы схем функционального преобразователя.
Функциональный преобразователь 9 содержит шеетиканальное логическое устройство, преобразователь 10 после довательностей импульсов датчика положения ротора и определитель 11 направления вращения (ОНВ).
Ыестиканальное логическое устройство выполнено в виде двух групп логических блоков по три в каждой группе, а каждый блок включает две трехвходовые схемы И, выходы которых объединены по ИЛИ.
В первую группу вХодят логические схемы И 12-17, во вторую группу логические схемы И 18-23.
Первый блок обрадован схемами 12 и 13, второй - схемами 14 и 15 и т.д.
Одноименные логические схемы, принадлежащие к разным блокам, образуют комплекты правого и левого вращения.
Так, в данном примере комплект левого вращения образуют схемы И 12-22 (четные), а комплект правого вращения - схемы 13-23 (нечетные).
Выходы логических блоков тестиканального устройства соединены с управляющими цепями ключей соответствующих групп и ветвей преобразователя частоты.
Рассмотрим работу функционашьного преобразователя по принци 1иальной схеме (фиг.2) и диаграммам напряжений (фиг.3-4).
Определитель направления вращения вала двигателя служит для того., чтобы выдавать сигналы, соответствующие правому и левому направлениям вращения, и состоит из триггера 24, дифференцирующих цепей 25 и 26 и схем 27-28 совпадения. Выход чувствительного элемента 4 через дифференцирующие цепи 25 и 26 соединен со входами схем 27-28 совпадения. Эти схемы имеют по два входа. На вторые входы схем 27 и 28 поступают соответственно сигналы с чувствительных элемент 8 и 6. Преобразователь 29 частоты состоит КЗ ключей 30-32 и 33-35, образующих соответственно первую и вторую группы. Обмотка якоря трехсекционная, ее секции А,В,С соедине ны в звезду. На выходах датчика положения рот ра формируются напряжения с крутыми фронтами (фиг.2-3) и обозначены в соответствии с обозначением датчиков Uj, и, и и и, и, Ug. Рассмотрим, например, йравое нап равление вращения двигателя, которо соответствуют диаграммы напряжений фиг.2. Напряжения, вырабатываемые чувст вительными элементами 3-5 и 6-8, образуют две трехфазные последовате ности импульсов со следующим чередо ванием фаз: Uj- Ug, U-, ,Ue При этом напряжение U отстает от U Ug отстает от U на 360/3 эл.град. Аналогично соотношение фаз напряжеи и Ug . Сдвиг между ний и и и., напряжениями и и и, U и Vj, и и Ug составляет 180 эл.град. На выходах цепочек 25 и 26 форми руются короткие импульсы Одц, которые поступают на один из двух входо схем 27 и 28 совпадений. Из фиг.З видно, что импульсы и.ц сов падают во времени, с импульсами напряжения I3gf поступающими на второй вход схемы 27 совпадения, поэтому импуль сы Одцпоявляются на выходе схемы 27 Так как импульсы Цдц не совпадают во времени с импульсами U-j при данном направлении вращенйй двигател:я то на выходе схемы 28 напряжения нет. Выходными импульсами схемы 27 триггер 24 устанавливается в положе ние, при. котором на прямом выходе имеется напряжение Uy , а на инверс ном выходе напряжение отсутствует Пусть произведен реверс двигател лю.бым из способов, например, переключение секций СМ, переключение дат чиков и т.д. Для упрощения рису«ка на фиг.2 цепи, осуществляющие реверс не показаны. Важно лишь то, что при реверсе изменяется порядок чередования фаз (фиг.З) и напряжения, вырабатываемые ДПР, чередуются в обратно порядке Ug- 0 и Ug- U. В этом случае импульсы совпадают йо времени с импульсами из; поэтому с выхода схели 28 импульсы поступают на вход триггера 24 и устанавливают его в положение, при котором появляется напряжение инверсном выходе. Определитель направления вращения в соответствии с чередованием фаз напряжений ДПР формирует постоян ное напряжение либо на прямом . выход (правое вращение), либо на инверсном (левое вращение)., Выход ОНВ 11 соединен с входными .цепями шестиканального логического устройства. Прямой выход ОНВ 11 соединён Ь oбъeдинeнны tt входами схем 13, 15, 17, 19, 21, 23 совпадений, образующих комплект правого вращения, инверсный выход ОНВ 11 соединен С объединенными входами схем 12, 14, 16, 18, 20, 22 .совпадений, образуюaiKx комплект левого вращения. Напряжения U-., и поступая на входы логических cxfeM создают предпосылки для их срабатывания. CxeNU совпадения комплекта правого вращения при на.пичии на их выходе напряжения и вьадают сигналы при одновременном поступлении на другие их входы сигналов с ДПР,осуществляя тем операцию логического умножения (конъюкции). Входы схем совпадения комплекта правого вращения должны соединяться с выходом чувствительного элемента своего канала и с выходом чувстви ;тельного элемента предыдущего канала, а также с прямым выходом определителя направления вращения. На выходах логических блоков И-ИЛИ формируются сигналы (фиг.2) которые при поступлении на рходн. . силовых ключей преобразователя частоты открывают их. Силовые ключи 30-35 могут быть любого типа: транзисторные,.тиристорные и т.д., необходимо чтобы эти ключи были полностью управляемые... Предполагается также, что каждый ключ имеет двухстороннуюю проводимость; если это, например, транзистор, то он должен быть шунтирован диодом в обратном направлении. При. правом направлении вращения на секциях обмоток СМ формируются напряжения с пря1иым порядком чере дования фаз (фиг.З): U.g- Uc; при этом напряжение Ug отстает от ид, UQ от UgHa угол 360/3 эл.град. Наводимая на обмотках ЭДС, например, Ед отстает по фазе от напряжения ид на угол Mof т.е. обеспечивается опережающая коммутация секций. При изменении направления вращения на обратное (левое) ОНВ формирует напряжение V инверсном вьтходе и создает предпосылку для срабатывания схем совпадения комплекса левого вращения, на которых происходит логическое умножение. Выход схем совпадения комплекта левого вращения должны соединяться с выходом чувствительного.элемента своего канала и с выходом чувствительного- элемента последующего канала, а-1:акже с инверсным выходом определителя направления вращения (фиг.1). Диаграммы напряжений при левом вращении ВД показаны на секциях с обратным (по сравнению с предыдущим случаем) порядком чередования фаз: Uj-- UB- Од; и со сдвигом 360/3 эл.град. Наводимая в секции ЭДС, наприме Едкак и в предыдущем случае, отстает от напряжения Цдна тот же самый угол fp, т.е. ив этом случае обеспечивается опережающая коммутация секций.. -g переходных режимах, когда подана команда на реверс и направление момента двигателя изменилось на п хэтиврположное, а направление вращения еще остается прежним, ОНВ воздействует на логические устройства в соответствии с порядком чередования фаз наппяжёний ДПР, т. независимо от режима (разгон, торможение) работы двигателя введенный в ФП определитель направления вращ нйя обеспечивает оперёжающуй Кошлут цию секций... Формула изобретения. Вентильный двигатель, содержащий т-ОёкЦйОнную синхронную машину, секции обмотокякоря которой соедин ны с выходом преобразователя частот с m ветвями и п группами, управляющие цепи ключей которого соединены с соответствующими выходами датчика положения poTog a, формирующего n-mфазных последобательностей импульсо через п-т-канальный функциональный .преобразователь, служащий для преобразования последовательностей импульсов датчика по Ьжения ротора в пьследовагеельности импульсов длител - 21Г... ностью--:- радиан , И сдвигом между импульсами внутри каждой из п-последовательностей ha радиан и сдвигом между п-последоватёльностями на радиан и выполненный в виде п групп логических блоков по m в каждой группе, каждый из которых состоит из объединенных по ИЛИ двух трехвходо.внх схем И, одноименные схеШ И, принадлежащие к разным блокам, образуют комплект правого и левого вращения, один из входов схе.мы И, каждого канала соединен с выходом своего канала датчика положения ротора, вторые входы схем И, принадлежащие к коплекту правого вращения, соединены с предыдущим каналом датчика положения ротора, вторые входы схем. И, относящихся ккомплекту левого вращения, соединены с выходом последующегоканала датчика положения ротора,отличающийся тем, что, с целью улучшения энергетических характеристик в переходных режимах и повышения линейности регулировочной характеристики, в функциональный преобразователь введен определитель направления вращения, входы которого соединены с датчиком положения ротора, прямой его выход соединен с третьими входами схем И комплекта правого вращения, а инверсный выход соединен с третьими входами схем И комплекта левого вращения. Источники информации, принятые во внимание при экспертизе 1. Патент США №3531702,кл.318-188, 1968. 2, Патент ГДР №110393, кл. 21 . .- ,гГ1
3
Vu
ie
Jau 2f 50
bs
jf
5 J 35 УЛ
