триггера, а входы реверсора и управляющие цепи устройств ввода третьего комплекта соединены свыходами
преобразователя напряжения, счетный вход синхронного триггера объединен с входом опроса устройства запоминания.

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Управляемый вентильный электродвигатель | 1981 |
|
SU983924A1 |
| Вентильный двигатель | 1983 |
|
SU1081753A1 |
| Вентильный электродвигатель | 1978 |
|
SU785929A1 |
| Управляемый вентильный электродвигатель | 1985 |
|
SU1259463A1 |
| Управляемый вентильный электродвигатель | 1988 |
|
SU1529363A2 |
| Стабилизированный вентильный электродвигатель | 1981 |
|
SU1007160A1 |
| Управляемый вентильный электродвигатель | 1986 |
|
SU1410212A2 |
| Реверсивный вентильный электропривод | 1988 |
|
SU1598097A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1264269A1 |
РЕВБРСИВИНЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ, содержащий статор с |гл секционной якорной обмоткой,: индуктор, транзисторный коммутатор, каждый бесконтактный ключ которого соединен с секцией якорной обмотки, преобразователь напряжения с двумя противофазными выходами, два блока эталонных импульсов, два комплекта устройств ввода, каждое яз которых выполнено с двумя управляющими цепями, устройство запоминания, состоят щее из )-триггеров с объединенным входом опроса, реверсор,-датчик положения ротора с двумя комплектами чувствительных элементов типа дроссель насыщения по ш чувствительных элементов в каждом комплекте и сигнальным элементов в виде ромба/ намагниченного по большой диагонали, формирователь импульсов каждого чув-. ствительного элемента, включающий транзисторный усилитель и компаратор импульсов по длительности, один из входов которого соединен с выходом усилителя, a второй - с выходом блока эталонных импульсов. . & г ,,,,,I . t обмотка, дросселя насьвдения подключена параллельно входу транзисторного усилителя, кроме того, вход упомянутых формирователей импульсов, связанных с первым комплектом чувствительных элементов и вход первого блока эталонных импульсов соединены с первым выходом преобразователя напряжения, a входы остальных формирователей - с вторым выходом преобразователя, выходы каждой пары формирователей импульсов, связанных с одноименньв и чувствительными элементами обоих комплектов, соединены с входом бесконтактного ключа к 1мутатора через устройство ввода первого комплекта, a через устройство вйода второго (Л комплекта - с одним из информационных входов устройства запоминания, отлич a ющи йс я тем, что, с целью расширения области применения вентильного электродвигателя за счет реализации экономичного шагового режима -работы, в него допол- . нительно введены третий комплект (Устройств ввода, синхронный триггер, со логическое устройство из (ИМ-2) двухвходовых элементов совпадения, выхоо со ю ды mэлементов совпадения которых объединены через логический элемент ИЛИ с первь 4и входами элементов совпадения (m+l) и (т-2), выходы каждой со пары транзисторных усилителей соединены через устройство ввода третьего комплекта с вторым входом элементов совпадения, a первые входы последних присоединены к выходам D-триггеров устройства запоминания, вторые входы элементов совпадения . frn+1) и (пн-2) соединены с выходом реверсора, a их выходы - с управляющими цепями устройств ввода первого комплекта, управляющие цепи реверсора и второго комплекта устройств ввода соединены с выходами синхронного
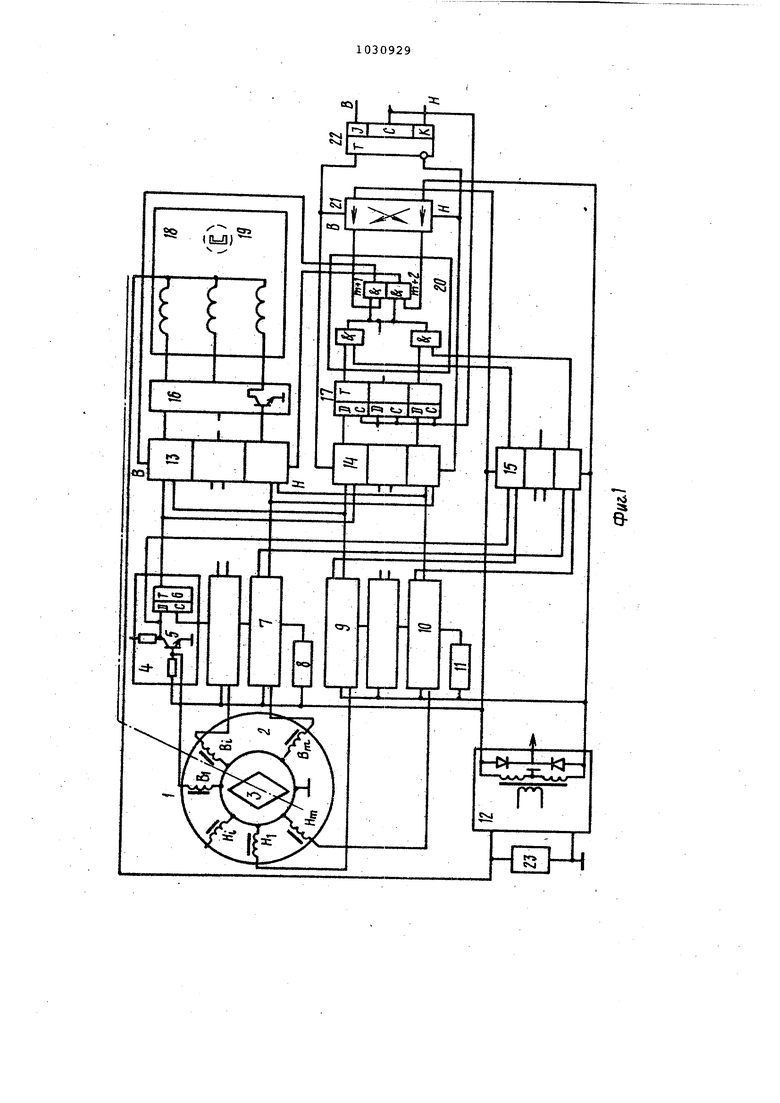
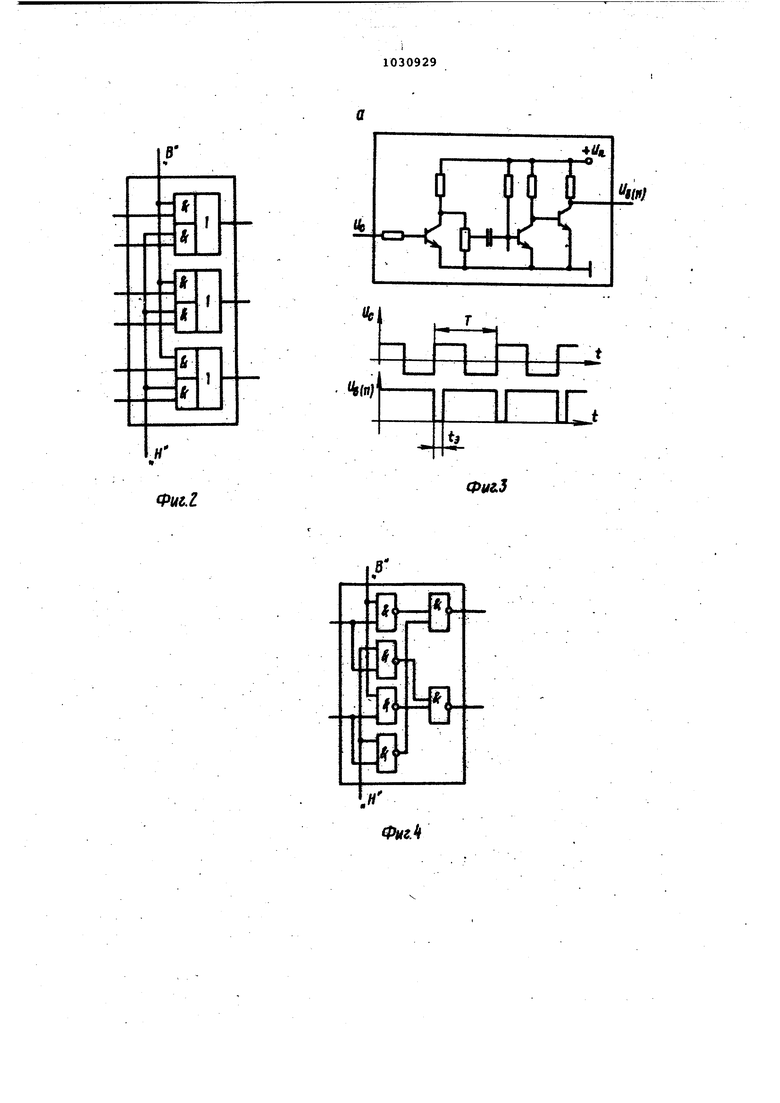
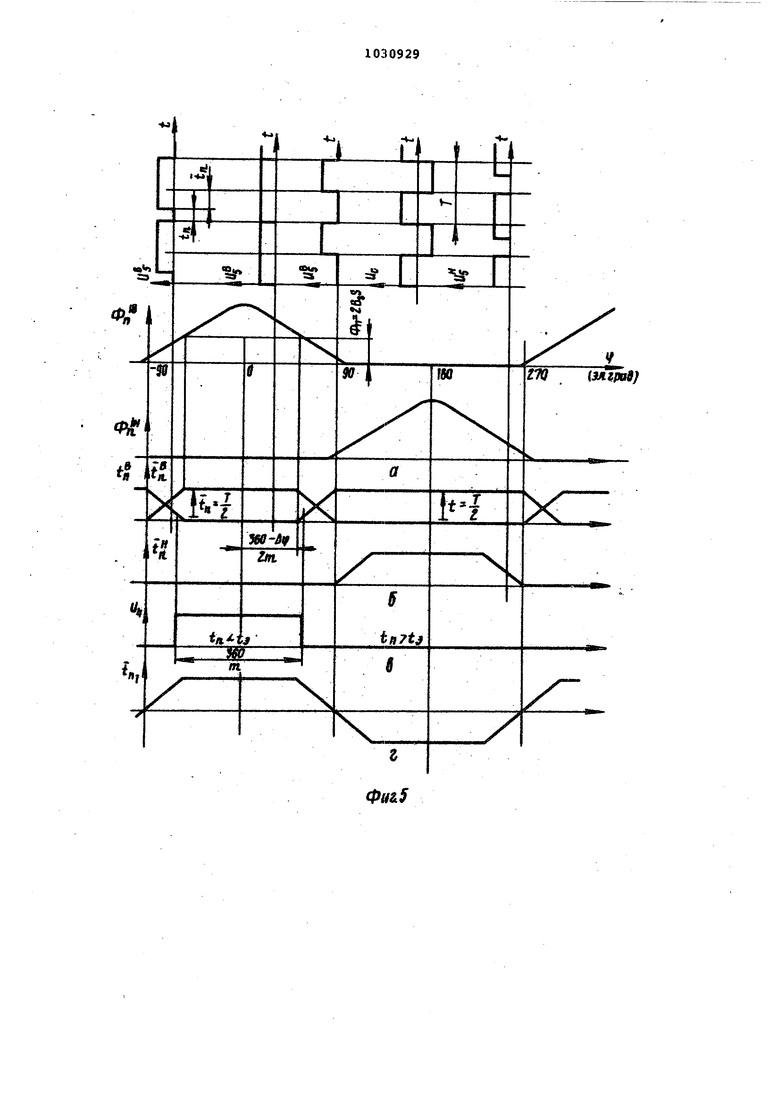
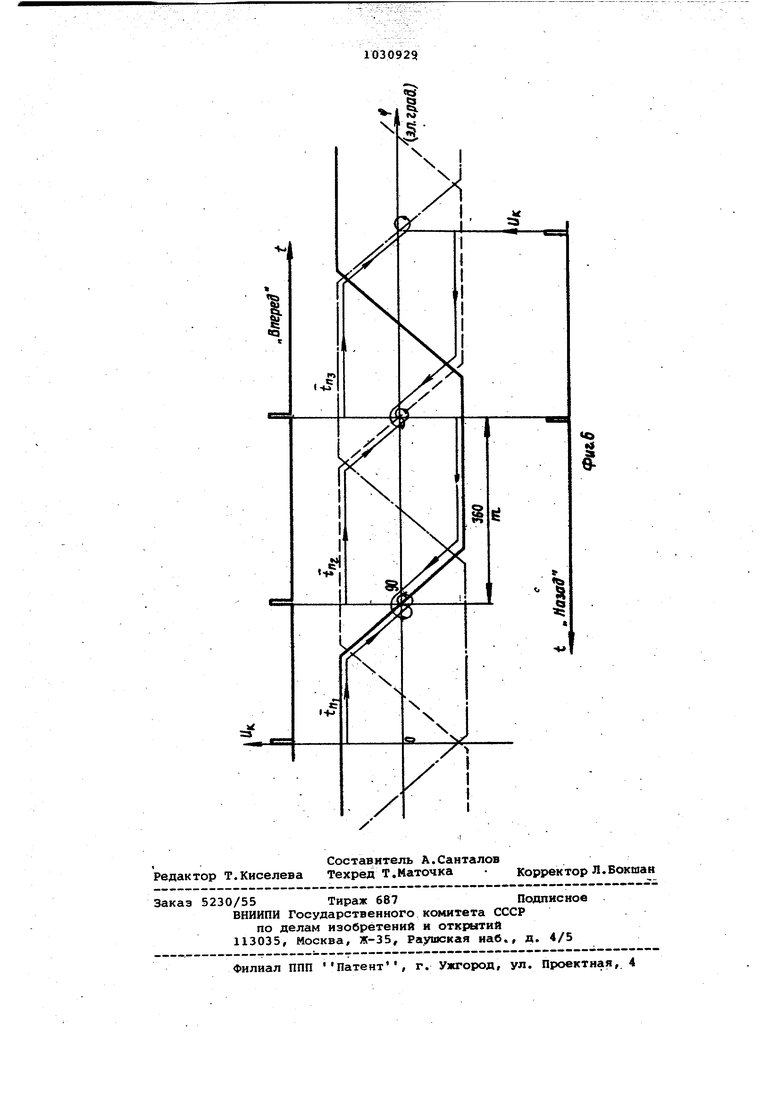
Изобретение относится к электротехнике, в частности к специальным электрическим машинам, и может быть использовано в качестве исполнитель ного устройства в системах с числовой обработкой информации. Известны электромеханические уст ройства, состоящие из электрической машины и бесконтактного логического устройства, подключенного своим вых дом к обмоткам электрической машины шаговые электродвигатели. Положительным качеством шаговых двигателе является способность непосредственного преобразования числовой (количества т1пульсов) информации в пропорциональное угловое перемещение ротора и связанного с нш объекта управления Известны также локально-замкнуты шаговые двигатели, обладающие большими функциональными возможностями и быстродействием J. Недостаток данного класса электрических машин - низкий КПД как в режиме отработки заданного углового перемещения, так и в режиме фиксирования тага. Наиболее близким к изобретению по технической сущности и достигаемому результату является реверсивный вентильный электродвигатель, содержсцций статор с |п-секционной якорной обмоткой, индуктор, транзисторный коммутатор, каждый бескон тактный ключ которого соединен с дв мя противофазными выходами, два бло ка эталонных импульсов, два комплек Та устройств ввода, каждое из которых выполнено с двумя управляющими цепями, устройство запсялинания, сос тоящее из 3) -триггеров с объединенным входом опроса, реверсор, датчик положения ротора с двумя ксмплектами чувствительных элементов типа дроссель насыщения по Hi чувствительных элементов в каддснл комплекте и сигнальным элементом в виде ромба, намагниченного по большой диагонали, формирователь импульсов каждого чувствительного элемента, включающий в себя транзисторный .усилитель и компаратор импульсов по длительности, один из входов соединен с выходом усилителя, а второй с выходом блока эталонных импульсов, обмотка дросселя насыщения подключена параллельно входу транзисторного усилителя, кроме того, входы упомянутых формирователей импульсов, связанных с первым комплектом чувствительных элементов и вход первого блока эталонных импульсов соединены с первым выходом преобразователя напряжения, а входы остальных формирователей с вторьм выходсил преобразователя, выходы каждой пары формирователей импульсов, связанных с одноименными чувствительньми элементами обоих комплектов, соединены с входом бесконтактного ключа коммутатора через устройство ввода перво- , го комплекта, а через устройство ввода второго комплекта - с одним из информационных входов устройства запоминания СЗ . Данный вентильный электродвигатель обладает указанньми положительньми качествами, кроме того, имеет простую конструктивную компоновку. (Эднако отсутствие у данного класса электрических двигателей свойства непосредственного преобразования числовой информации в угловое (шаговое) перемещение ротора ограничивает область применения подобных устройство малоэффективными аналоговыми системами управления и регулирования. В случаях необходимости пршленения вентильных двигателей в автоматизированных системах с числовой обработкой информации (устройствах с микропроцессорами или мини-Э ВМ) , получивших в настоящее время преобладающее распростране 1ие, последние должны дополняться весьма сложными и дорогостоящими устройствами преобразования информации типа АЦП, ЦАП, угол-код. Цель изобретения - расширение области прю енения вентильного электродвигателя за счет реализации в них сзвойства непосредственного преобразования числовой информации в угло1вое перемещение ротора. Указанная цель Достигается тем, что в реверсивный вентильный электродвигатель, содержащий статор с |гп-секци6нной якорной обмоткой, индуктор, транзисторный коювутатор, кажд)л1Л бесконтактный ключ которого соединен с двумя противофазньми вы :ходами, два блока эталонных импульсов, два комплекта устрюйств ввода, каждое из которых выполнено с двумя управляющими цепями, устройство запо минания, состоящее из Б-триггеров с объединенным входом опрос.а, реверсор, датчик положения ротора с двумя комплектами чувствительных элементов типа дроссель насьацения по mчувствительных элементов в каждом комплекте и сигнальньм элементов в виде ромба, намагниченного по большо диагонали, формироватф1ь импульсов каждого чувствительного элемента, включающий транзисторный усилитель и компаратор импульсов по длительности, один из входов соединен с вы ходом усилителя, а второй - с выходом блока эталонных импульсов, обмотка дросселя насыщения подключена параллельно входу транзисторного усилителя, кроме того, входы упомянутых формирователей импульсов, свя занных с первым комплектом чувствительных элементов и вход первого бл ка эталонных импульсов соединены с первым выходом преобразователя напр жения, а входьа остальных формирователей с вторым выходом преобразоват ля, выходы каждой пари формировател импульсов, связанных с одноименными чувствительньми элементами обоих комплектов, соединен с входом бесконтактного ключа- коммутатора через устройство ввода первого комплекта, а через устройство ввода второго ко плекта - с одним из информационных входов устройства запоминания, допо нительно введены третий комплект ус ройств ввода, синхронный триггер и логическое устройство из (цИ-2) -логи ческих элементов совпадения, выходы Ю1 логических элементов объединены через Логический элемент ИЛИ с первъалч входами логических элементов (VTH-l) и (irin-2) , выходы каждой пары транзисторных усилителей соединены через устройство ввода третьего ком плекта с вторым входом логических элементов, первые входы логических элементов присоединены к выходам 1 -триггеров устройства запоминания, вторые входы логических элементов (m+l) и (т+2) соединены с выходом реверсора, а их выходы - с управляющими цепями устройств ввода первого комплекта, управляющие цепи ре версора и второго комплекта устройс ввода соединены с выходами синхрон ного триггера, а входы реверсора и управляклцие цепи устройств ввода третьего комплекта соединены с выходами преобразователя напряжения, счетный вход синхронного триггера объединен с входом опроса устройства запоминания. На фиг.1 представлена принципиальная схема реверсивного вентильного двигателя; на фиг.2 - схема комплекта устройств ввода приУИ З; на фиг.З - блок эталонных импульсов j(3a - принципиальная схема, 36 временные диаграммы); на фиг.4 реверсор; на фиг.5 - диаграммы напряжений на основных узлах функциональной схемы; на фиг.6 - зависимос(Ти изменения сигнала на выходах третьего комплекта устройства ввода и командные импульсы UK t поясняющие работу РВД в шаговом режиме. Устройство.содержит датчик 1 положения ротора (ДПР) , состояо1Ий из диэлектрической втулки 2 с чувствительными элементами В ... ,В, Н ,.. . дроссель насьацения и сигнального элемента 3, выполненного-в форме poMta, намагниченного в направлении большей диагонали, формирователь 4 импульсов, транзисторны усилитель 5, компаратор 6 импульсов по длительности, формирователь 7, аналогичный формирователю 4, блок 8 эталонных импульсов, формирователи 9 и 10, аналогичные формирователям 4 и 7, вто:рой блок 11 эталонных импульсов, преобразователь 12 постоянного напряжения в переменное, комплекты 13-15 устройств ввода, каждый из которых состоит из щ вводных устройств; транзисторный .коммутатор 16, устройство 17запоминания, электрическую машину 18cm-секционной якорной обмоткой и вращающимся индуктором 19, логическое устройство 20, реверсор 21, синхронный триггер 22, источник 23 постоянного напряжения. Буквами В и И обозначены управляющие цепи; Up и ) вход и выход блока эталонных импульсов; у Ми), напряжение на выходе транзисторного усилителя 5 формирователей импульсов чувствительных элементов 1В(1Н); Uc - напряжение синхронизации; lie(n) - период; Ф - магнитный поток, пронизывающий сердечник чувствительного элемента 1В(1Н); ii длительность перемагничквания сердечника чувствительного элемента 1В (1Н) длительность насыщенного состояния сердечника чувствительного элемента 1В(1Н) заполупериод положительной полуволны напряжения; -fi, - длительность импульсов на первом выходе третьего комплекта устройств ввода. Конструктивную основу РВД составляет электрическая машина 1В, с якорной обмоткой на статоре. Секции обмотки якоря соединены вУИ-лучевую звеэяу и подключены между полюсом питающей сети постоянного напряжения и выходами транзисторного коммутатора 16. Вращающийся индуктор 19 выполнен с четырехполюсной симметричной магнитной системой. С валом электрической машины жестко сочленен ДПР 1, состоящий из двух основных деталей; диэлектрической втулки с радиальными пазами на внут ренней поверхности и ромбовидного магнита. Диэлектрическая втулка кре пится к торцевой поверхности статора электрической машины, а магнит насаживается на вал электрической машины и стопорится в плоскости сим |иетрии втулки Пазы разбиты на две одинаковые группы. В первой группе пазы расположены один относительно З&О другого со сдвигом на угол град,/а каждалй паэ1 второй группы сме щен относительно соответствующего п -1бО за первой на угол, равный геом. град., здесь р - чисж) пар полюсов индуктора электрической машины, Уч число секций якорной обмоткн. В паз размещены чувствительные к магнитно му полю элементы, функциоиируюцие п принципу дросселей насыщения и пред ставляющие собой миниатюрное ферритовое кольцо с одной обмоткой. В m пазах первой группы размещены чувс вительные элементы В ,. .. ,... ,В в соответствии с условным направлением вращения электрической машины Вперед , а во второй - H/i ,. .. , Н,... соответствии с направлением вращения йазад. Обмотка каждого чувствительного элемента подключена параллельно переходу база-эмиттер транзистора 5, входящего совместно с компаратором импульсов по длительности б в состав фор лирователя ившульсов чувствительного элемента 4 (7,9,10). Выход тран зистора, выполняющего функции инвертирующего усилителя напряжения, соединен с одним из входов компаратора . Компаратор ш пульсоВ по длитель нести представляет собой Э триггер с динамическим входом С. ИнФрсяиационный вход триггера Р соедине с выходом усилителя, а вход С объеди нен с выходом блока 8(11) эталонных импульсов. При этом компараторы, от носящиеся к формирователям импульсов чувствительных элет«ентов условного направления Вперед (Назад), объединены по входу С с выходом блока 8(11) эталонных импульсов. Блок 8(11) эталонных импульсов по длительности состоит из синхронизирующего транзистора двухкаскадного транзисторного усилителя, смещенного по цепи входа в открытое состояние, времязгшающего конденсато .ра и потенциометрического делителя напряжейия, подключенного к выходу синхронизирующего транзистора. Между выходом делителя и входом неинвертируквдего усилителя подключен времязадающий конденсатор (фиг.З). Для синхронизации работы блоков и узлов РВД в схеме предусмотрен преобразователь постоянного напряжения в переменное с двумя противофазными выходами, именуемый в дальнейшем - преобразователь напряжения, который выполне по одной из модификаций широко иэгвестной схемы мультивибратора Ройера.. Первый выход преобразователя напряжения соединен с входом формирователей импульсов чувствительных элементов Вперед и входом блока 8 эталонных импульсов (входом синхронизирующего транзистора) , а второй - с входом формирователей импульсов чувствительных элементов Назад и входом блока 11 эталонных импульсов. Указанные соединения выполнены через балластные резйс.торы. Для удобства дальнейшего изложения первый выход преобразователя напряжения будем -считать синхронизирующим. Связь выхода формирователя импульсов чувствительных, элементов с i входами транзисторного коммутатора 16 осуществлена через первый комплект устройств ввода 13. Комплект устройств ввода содержит .т комбинированных логических элементов 2И-2ИЛИ с равнозначными входами Сфиг.2 ). Первые входы логических элементов И объединены в две управляющие цепи комплекта устройств ввода & и н f а вторые входы логических эла ентов И каждого логического элемента 2И-2ИЛИ подключены к выходам фо1 1ирователей импульсов чувствительных элементов, смещеи180ных друг относительно друга на -- геом,град. В зависимости от состояния управляющих входов инфо({ация с одного из входов устройства ввода передается на его выход (один из входов соединяется с выходом). Выходы второго комплекта устройства ввода 14 запараллелены с входами первого, а его выходы соединены с информационными входами устройства 17Запоминания, каждый канал запоминания которого образован D -триггером с информационным входом D и входом опроса (управления)С . Выходы устройства запоминания соединены с первыми входами логического устройства 20, выполненного из (IW-2) логических элементов 2Й. М логических элементов 2И объединены своими выходами через логический элемент ИЛИ с первыми входами логических элeмeнt6в (пн) и (н-2) . Для потенциально чувствительной логики логический элемент ИЛИ вы,полняется непосредственным соединенйем выходов логических элементов 2 в так называемое монтажное или. Выходы логических элементов (пн-1) и (W4-2) соединены с управляющими цепями первого комплекта устройств ввода. Вторые входыгм логических .элементов И подключены к выходам тр тьего комплекта устройств 15 ввода, а вторые входы двух логических элементов (ГУ1+1) и {1ГЧ-2) - к выходам ре версора 21. Управляющие цепи реверсора объединены с управлянлцими цепями второго комплекта устройств ввода и выходами синхронного триггера 22. Входы реверсора, в свою очередь, объединены с упразлягадими цепями третьего комплекта устройств ввода и выходами преобразователя на пряжения. Каждая пара входов устрой ввода третьего комплекта связана с выходами транзисторных усилителей 5 относящихся к чувствительным элемен там, смещенным друг относительно друга на геом.град. Вход С синхронного триггера 22 объединен с од поименными входами устройства запом нания и служит для приема цифровой информации в унитарном коде о требуемом перемещении ротора РВД и механически связанного с ним объекта регулирования. ИнфоЕякация о направлении принимается по входамЭ , К синхронного триггера в виде уров ней напряжения. Работа РВД происходит следующим образом. . В исходном состоянии жестко сочл ненная система роторов электрической машины и ДПР занимает произволь ное угловое положение. Для определенности изложения предположим, что направление большей диагонали ромбо видного магнита ДПР совпадает с пазом, в котором расположен чувствительный элемент В и его магнитный поток фу, пронизывает сердечник чувс вительного элемента. Параметры магнита В,Н,,х и его геометрия выбраны таким образом, что сердечник чувствительного элемента полностью насыщен в пределах поворота ротора ДПР на угол11 5 - эл.град. rrt от принятого исходного положения, здесь угол запаса, необходимый для обеспечения устойчивой регулировки угловой длительности вы ходного сигнала формирователя им- пульсов в области -- эл.град. При повороте ротора ДПР на большой угол степень насыщения сердечника линейно уменьшается и достигает нулевого значения при углах поворота, больших ±90 эл.град. Вследствие симметричности конструкции ДПР описанный процесс подмагничивания сердечника распространяется на все 2 чувствительных элемента. , При подключении устройства к источнику 23 постоянного напряжения преобразователь 12 напряжения формирует на своих выходах два перемЬнных напряжения одинаковой прямоугольной формы и амплитуды, но находящихся в противофазе. С первого выхода переменное напряжение (напряжение синхронизации) поступает на вход формирователей -импульсов чувствительных элементов R ,..., на вход блока 8 эталонных импульсов, а с второго - на вход формирователей импульсов чувствительных элементов К;|,... ,Н и на вход блока 11 Эталонных импульсов. В силу однотипности построения фор-. миро ателей импульсов подробно рассмотрим работу только одного из них, например 4. Переменное напряжение, поступающее на вход транзистора 5, прикладывается к обмотке чувствительного элемента В . Вследствие диодной характеристики перехода базаэмиттер входной цепи транзистора напряжение на обмотке чувствительного элемента асимметрично. Положительная :полуволнанапряжения ограничивается на уровне (9,0-0,8)В, в случае применения транзистора прюводимости п-р-п, а отрицательная -соответствует амплитуде выходного напряжения преобразователя напряжения. Положительной полуволне напряжения на обмотке чувствительного элемента соответствует открытое состояние транзистора, а отрицательной - закрытое. Ток базы транзистора ограничива тся балластным резистором Rg. Под действием приложенного напряжения сердечник чувствительного элемента перемагничивается по частному циклу петли гистерезиса. Вследствие асимметричности напряжения рабочим полупериодом является полупериод положительной полуволны напряжения {полупериод с меньшей амплитудой). В течение рабочего полупериода, изменение магнитного потока в теле, неподмагниченного сердечника составляет величину, равную ДФ., где и - приложенное к обмотке напряжение (0,8 В); Т - период частоты переменного напряжения; 9 - сечение сердечника; В$- индукция насыщения. В нерабочий полупёриод сердечник возвращается в исходное магнитное состояние. Поддалагничивание сердечника по;;ем ромбовидного магнита р ведет к уменьшению рабочего потока сердечника До тех пор, пока величина рабочего потока в теле сердечника превосходит по величине переменную составляющую магнитного потока i|f|i Д( A4)j , сердечник перемагничивается в течение положительной полуволны напряжения не насыщаясь . Обмоточные данные чувствительного элемента выбраны такимi образом, чт в пределах угла поворота ротора ДПР f 9 о эл. град. происходи насьсцение сердечника в процессе его перемагничивания положительной полуволной напряжения. Длительность перемагничивания t, является функцией величины подмагничиванядего поля фу, ромбовидного магнита и определяется следующим соотношением , т fcv. - г:«/ :& -4г- За счет ромбовидной конфигурации магнита распределение его индукции в пазах диэлектрической втулки близко к линейной зависимости ф г К (фиг.5а) и, следовательно, длительность перемагничивания сердечника чувствительного элемента является линейной функцией углового положения ротора ДПР. В момент насыщения сердечника, сопротивление обмотки резко уменьшается до величины омического, что ведет к шунтировке перехода база-эмиттер транзистора и его запиранию. Следовательно, длительность открытого состояния транзистора равняется длительности перемагничивания сердечника. В пределах угла поворота ротора ДПР jgt . эл.град. от принятого исходного положения транзистор закр } , так как сердечник насыщен полностью фу, / , а при углах 7±90 эл.град, длительность открытог состояния транзистора составляет по периода t - . Таким образом, длительность нуле вых импульсов на выходе транзистора однозначно определяет угловое положение индуктора РВД. На фиг.5 дана графическая интерпретация описанног процесса. Для преобразования высокочастотных импульсов в дискретно и меняющийся сигнал в схеме формирова теля импульсов предусмотрен компаратор импульсов по длительности, ко торый сравнивает длительность нулевых импульсов с выхода транзисторов tf, с длительностью импульсов блока эталонных импульсов -fc.Ha выходе компаратора формируется единичный сигнал приЬи Чх9 и нулевой при .Длительность этйПйнных импульсов выбрана из условия получения единичного сигнала на выходе компаратора при повороте ротора РВД на уголi:- г-эл.град. от принятого исходного положения (фиг. 5, с ). На выходах остальных формирователей импульсов формируются аналогичные сигналы, смещенные по углу поворота индуктора РВД в соответствии с размещением чувствительных элементов и диэлектрической . Например, для трехфазной якорной обмотки РВД выходные сигналы формирователей импульсов каждого комплекта имеют угловую ширину в 120 эл. град, и следуют поочередно один за другим при вращении ротора. В зависимости от состояния уровней сигнала на управляющих входах первого комплекта устройств ввода, например, высокий уровень на входе В и низкий на входе И , сигналы с выхода формирователей импульсов первого комплекта проходят на входы KovwyтатЬра 16. Открывается соответствуют щий -транзисторный ключ и к секции 1 якорной обмотки прикладывает напряжение. От взаимодействия протекающего в секции тока с полем индуктора возникает вращающий момент, под действием которого ротор электрической машины поворачивается в направлении Вперед При выходе из рабочего состояния одного формирователя импульсов в работу вступает другой и соответственно переключаются секции якорной обмотки, обеспечивая непрерывное воздействие вращающего момента на ротор электрической машины. Первоначальной настройкой ДПР (поворотом обоймы с чувствительными элементами) достигается реализаций максимального значения вращающего момента, развиваемого электрической машиной. При смене состояния уровней сигнала на управляющих входах первого комплекта устройств ввода запрещается передача сигналов, вырабатываемых комплектом чувствительных элементов Вперед , и одновременно разрешается передача сигналов, вырабатываемых комплектом чувствительных элементов Назад. Происходит реверс направления вращения ротора электрической машины. Таким способом достигается работа электрической машины в режиме обычного реверсивного вентильного двигателя. Организация шагового режима работы электрической машины происходит следующим образом. Рассмотрим движение ротора электрической машины из принятого исходного положения в направлении Впе . В этом случае на вход синх ронного триггера 22 подается единич ный уровень напряжения, а на вход к нулевой. Данное состояние уровней напряжения появится на выходах триг гера, соответственно, прямом и инверсном в момент прихода на вход С командного импульса на совершение шага в заданном направлении и оно с хранится до выполнения двух условий изменения состояния 7, К входов три гера (подачи команды на. реверс) и прихода очередного командного импульса на совершение очередного шага, в обратном направлении. Выходны ми сигналами триггера координируется работа реверсора 21 и второго комплекта устройств 14 ввода. Согласно выбранному направлению Вперед второй комплект устройств вво да передает выходные сигналы формирователей импульсов первого комплекта на информационные) входы устрюйства 17 запоминания. Так, еди ничный уровень напряжения с выхода формирователя 4 передается на первый вход Р устройства запоминани а на остальные входы передается нулевой УЕЮвень напряжения. С приходом командного импульса на входы .С состояние D входов передается на выходы устройства запоминания и хранится там до прихода очередного командного импульса. Выходными сигналами устройства запоминания осуществляется согласованный с угловым положением ротора- выбор выхода устройств ввода третьего комплекта. Единичный уровень напряжения с выхода первого 3 -триггера устройства запоминания прикладывается к первому входу пер Ього элемента совпадения логического устройства 20. Подаваемые на вторые входы схем совпадения импульсы с выходов третьего комплект устройств ввода передаются НЕ их выходы только первым элементом сов падения, так как на первых входах остальных элементов присутствует нулевой уровень напряжения. Наибольшую функциональную нагрузку несет третий комплект устро ввода, поэтому более подробно рассмотрим его работу. На каждую пару входов устройств ввода третьего комплекта подаются модулируемые по длительности импульсы с выхода каждой пары формиро вателей импульсов (с выхода транзисторов 5), образованной одним фо мирователем импульсов nepscio комплекта и формирователем игл пульсов второго комплекта, свяэачйьлл с чув ствительньфли элe ;eктaмя, смещенным геом.грел..- друг относительн друга, например В и Н, . Переменное напряжение, передаваемое с выходов преобразователя напряжения на управляющие цепи устройств ввода третьего комплекта через балластные резисторы, синхронизирует работу последнего. При положительной полуволне синхронизирующего напряжения (напряжения на первом выходе преобразовател напряжения) единичные импульсы tj, с выхода фop иpoвaтeлeй импульсов первого комплекта передаются на соответству ощие выходы устройств ввода третьего комплекта, а при отрицательно1 полуволне синхронизирующего напряжения (положительной полуволне напряжения на втором выходе преобразователя напряжения) происходит передача единичных импульсов с выхода формирователей импульсов второго комплекта. В результате такой синхронизации произведена, во-первых, отстройка от ложных импульсов единичного уровня, формируемых на выходах транзисторов 5 при отрицательной полуволне напряжения на обмотке чувствительного элемента; во-вторых, на выходе каждого устройства ввода сформирована характеристика зависимости длительности импульсов в функции yi-. лового положения ротора, однозначно определяющая положение ротора при повороте его на 360 эл.град. Графически характеристика.представлена на фиг.Зд.. Она имеет вид ограниченной по амплитуде синусоиды. Введенное обозначение положительной и отрицательной длительности импульсов осуществлено условно, для графической интерпретации факта синхронизации импульсов на выходах устройств ввода третьего комплекта соответст- венно с положительной и отрицательной полуволнами синхронизирующего напряжения.Семейство из характеристик, формируемых на выходах устройств ввода третьего комплекта, представлено на фиг.6. Характеристики имеют одинаковую форму в силу однотипности построения каналов форЯ ирования, но смещены одна относительно другой на --- эл.град., в соответствии с расположением чувствительных элементов ДПР. С помощью логическог.о устройства осуществляется выбор требуемой характеристики из условий исходного положения ротора электрической машины, а также заданного направления вращения и подключение выбранного выхода к управляющим цепям устройств ввода первого комплекта. Исходное положение логическому устройству задано вторым комплектом устройств ввода, а требуемое направление вращения реверсом. Так, импульсы с перво-о выхода устройст в ввода третьего комплекта через первый эл мент совпадения поступают на первы входы двух элементов совпадения (т+1) и (м+2), На вторые входы эти элементов передаются реверсором пол жительные полуволны напряжения пре образователя напряжения. Для задан ного направления Вперед импуль сы на втором входе элемента совпадения (ж+1) синфаэны с положительной полуволной синхронизирующего напряжения, а на втором входе элемента совпадения (т+2) - с отрицательной полуволной, В принятом исходном положении импульсы на перво выходе устройств ввода третьего Ко плекта синфазны с положительной по луволной синхронизирующего напря-. жения и поэтому передаются с входа элемента совпадения (In+l) на управ ляющую цепь 6 устройств ввода первого комплекта, В такт с этими импульсами устройства ввода первого комплекта передают сигналы с выхода фоЕ.1ирователей импульсов компле та Вперед на входы коммутатора Единичный уровень С выхода формиро вателя 4 передается на вход коммутатора, который подключает секцию Г к источнику постоянного напряжен Среднее значение пульсирующего напряжения, прикладываемого к секции прямо пропорционально относительно длительности импульсов на соответствующем выходе третьего комплекта устройств ввода. За счет взаимодействия протекаю щего в секции якорной обмотки тока с полем индуктора ротор электрической машины начинает поворачиваться в направление Вперед, При повороте ротора на угол -г- геометрических градусов происходит переключение одиничных уровней напряжения на выходах формирователей импульсов и соответствукндее переключение секций якорной обмотки. Секция I отключается, а секция К , развивающая большой вращающий момен включается в работу. Если в этот момент не будет подан командный импульс на совершение очередного шага то состояние устройства запоминания не изменяется и к управляющей цепи Вперед остается подключенным первый выход устройствввода. третьего комплекта (фиг.6). Дальнейшее движение ротора уже происходит при уменьшении длительности импульсов на управляющей цепи устройств ввода первого комплекта и, следовательно с пропорциональном длительности сни женйем среднего значения напряжения прикладываемого к секции якорной обмотки. Скорость поворота ротора электрической машины замедляется. При повороте ротора на -г-- эл.град. от исходного положения среднее значение прикладываемого к секции // напряжения становится равным нулю. Если в этом положении скорость поворота ротора не снизилась до нулевого значения, то за счет инерционности ротора происходит дальнейший поворот ротора, но уже при воздействии на ротор тормозного вращающего момента.При смещении ротора на угол, больший - геом.град, на первом выходе устройств ввода третьего комплекта появляются расширяющиеся по длительности импульсы, в такт с отрицательной полуволной синхронизирующего напряжения, и поэтому они передаются элементом совпадения (Уп+2) на управляющую цепь Назад устройств ввода первого комплекта. В такт с импульсами на управляющей цепи выходы формирователей импульсов второго комплекта подключаются к входам коммутатора, обеспечивая периодическое отпирание транзисторного ключа. Через открытый ключ к соответствующей секции якорной обмотки прикладывается пульсирующее напряжение постоянного тока. Протекаквдий в секции ток, взаимодействующий с полем индуктора, создает электромагнитный момент, действуюций на ротор электрической машины в направлении Назад.Ротор эффективно тормозится, а затем начинает повора-, назад. чиваться в направление При достижении углового положения -j- геометрических градусов среднее знаг. чение напряжения на . секции якорной обмотки вновь снижается до нулевого значения. Если и в этом случае скорость поворота будет отлична от нулевого значения, то вновь произойдет переключение цепей управления первого комплекта устройств ввода. Так как данная структура принципиально устойчива, то через несколько (2-3) колебаний ротор успокоится в устойчивом состоянии. Электрическая машина может находиться в занимаемом устойчивом положении неограниченное время с минимальным энергопитанием, определяемым моментом трения. Если на ротор будут воздействовать активные возмущающие моменты, то он будет отклоняться от занимаемого положения на , 360 некоторый угол (меньший -г-г геом. град, Возникающий при смещении ротора вргидающий момент будет полностью компенсировать возмущающие возействия. Подавая командные импульсы, можно совершать неограниченное количество шагов в заданном направлюНИИ. При необходимости реверса направле ия перемещения достаточно сменить уровни напряжения на 7 , К-йходах синхронного триггера и лодать командный импульс на входы С синхронного триггерг и устройства запоминания для совершения шага в обратном направлении. Работа устройства происходит аналогично описанному, с той лишь разницей, что второй комплект УСТРОЙСТВ ввода передает выходные сигналы второго комплекта фО1 4иррвателёй импульсоЕ на кнформациоииые входы устройства запоминания,, а реверсор реверсирует синхронизирующие импульсы на та7орьк входах элементов совпадения (nn-l) и (угн-2) . Графическая интерпретация реверса РВД после со&еЕшения трех шагов .Вперед представлена на фиг.6. Длина первого шага зависит от ис ходного положения ротора и может пр нюлать значения в пределах 90(W-2) 90(м42) Ир - W (Ир а последуК1Щих шагов неизменна и рав 360 геом.град. Изменением числа секций якорной обмотки и числа пар полнюов индуктора можно создавать электродвигатели с требуемой ценой совершаемого ша:га. Для совершения ускоренных перемещений «объек та, например для возBJpaTa в исходное положение, РВД может быть переведен в режим работы обычного реверсивного вентильного двигателя. Реализация указанного ре жима, достигается подачей высокочастотных импульсов на объединенные входы С синхронного триггера и уст ройства запоминания. В этом случае будет происходить враноение ротора электрической машины без фиксации шагов. В принципе реализация ускоренных перемещений наиболее удобно достигается за счет непосредственного воздействия на управлякяцие це первого комплекта устройств ввода. Максимальный вращающий момент РВД зависит от величины прикладыва емого к секции напряжения постоянного тока. Пульсирующий характер последнего несколько снижает эффек тивность коэффициента использовани электрической машины. При создании быстроходных систем регулирования это ограничение легко устраняется за счет включения расширителей импульсов между выходами элементов совпадения +1) и (wj+2) и управляющими цепями первого комплекта устройств ввода.Предлагаемый РВД, органично сочетая свойства электродвигателя постоянного тока с шаговьм, обладает широкой универсальностью; может применяться для построения высоконадежных бесконтактных tr экономичных систем электропривода, как с аналоговыми, так и с числовыми системами обработки информации. Достигнуто минимальное энергопотребление электродвигателя в шаговом режиме работы за счет фиксации шага синхронизирукщим моментом, вырабатываеквзм по линейно изменяющимся сигналам ДПР.. Предлагаемый двигатель позволяет разрабатывать быстродействие системы электроприводов высокой точности, обеспечивая максймальну производительность рабочего механизма. Высокая точность достигается шаговой отработкой финишных отрезков перемещения объекта, а высокая производительность - ускоренными перемещениями в режиме обычного вентильного двигателя. Кроме того, с целью повышения нс кежности и срока службы рабочего механизма можно сформировать оптимальиые траектории ускорений и эамедле{1Ий ротора РВД при шаговой отработке перемещений объекта за счет введения расширителей импульсов и корректирующих элементов. Экономически целесообразно использовать РВД в автсжатизированных системах с числовой обработкой информации, например, в устройствах числового программного управления металлорежущими станками вместо применяемых шаговых двигателей типа ШЩ. За счет повьвиення производительности станков ожидается су1цественный эконшический эффект. Наиболее целесообразно применять данные РВД в космонавтике , где решающими факторами выбора являются надежность, максимальный КПД, минимальный вес и широкие функциональные возможности, как наиболее полно удовлетворяющие из известных всем эти, требованиям.
Фиг,
0V&J
t-M
LJ
1
/
X
ч
S
tJQ {злл1 а9}
т
X
1
i
ZffL
Х
n
ta7tj
7
Ф025
