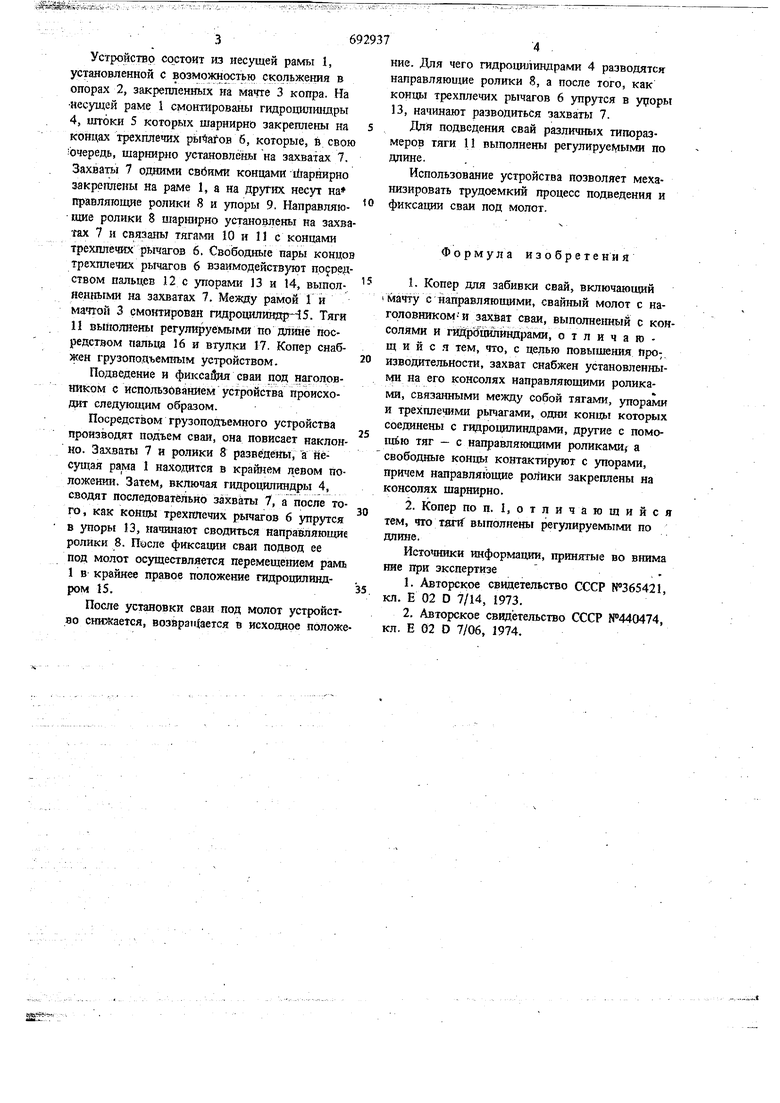
Устройствр состоит из несзтаей рамы 1, установленной с возможностью скольжения в опорах 2, закрепленных на мачте 3 копра. На несущей раме 1 смонтированы гвдроцилгаздры 4, штоки 5 которых шарнирно закреплены на концах трехплечих б, которые, в свою ючередь, шарнирно установлены на захватах 7. Захваты 7 одними свбимй концами Шарнирно закреплены на раме 1, а на других несут на правляющие ролики 8 и упоры 9. Направляющие ролики 8 шарннрно установлены на захватах 7 и свяэа1гы тягами 10 и 11 с концами трехплечих рычагов 6. Свободные пары концов трехплечих рычагов 6 взаимодействуют посредством пальцев 12 с упорами 13 и 14, выполненнымк на захватах 7. Между рамой 1 и мачтой 3 смонтирован гидроцллиндр-15. Тяги 11 выполнены регулируемыми по длине посредством пальца 16 и втулки 17. Копер снабжен грузоподъемным устройством.
Подведение и фиксаЗля сваи под наголовником с использованием устройства происхорпснт следующим образом.
Посредством грузоподъемного устройства производят подъем сваи, она повисает наклонно. Захваты 7 и ролики 8 разве деНы, а несущая рама 1 находится в крайнем левом положении. Затем, включая гидроцилиндры 4, сводят последовательно захваты 7, а после того, как концы трехпттечих рычагов 6 упрутся в упорь 13, начинают сводиться направляющие ролики 8. Пйсле фиксации сваи подвод ее под молот осуществляется перемеще Швм рамь 1 в крайнее правое положение гидроцилиндром 15.
После установки сваи под молот устройство снижается, возврзнйется в исходное положе- кл. Е 02 О 7/06, 1974.
ние. Для чего гидроцютиндрами 4 разводятся направляющие ролики 8, а после того, как концы трехплечих рычагов 6 упрутся в уцоры 13, начинают разводиться захваты 7.
Для подведения свай различных типоразмеров тяги 11 выполнены регулируемыми по длине..
Использование устройства позволяет механизировать трудоемкий процесс подведения и фиксации сваи под молот.
Формула изобретения
1.Копер для забивки свай, включающий
I мачту с направляющими, свайный молот с наголовникоми захват сваи, выполненный с консолями и гйд|рд1пи1Йндрами, отличающийся тем, что, с целью повыщения Производительности, захват снабжен установленными на его консолях направляющими роликами, связанными между собой тягами, упорами и трехплечими рычагами, одни концы которых соединены с гидроцилиндрами, другие с помощью тяг - с направляннцими роликами,- а свободные концы контактируют с упорами, причем направляющие роЛики закреплены на консолях шарнирно.
2.Копер по п. I, отличающийся тем, что Tanf выполнены регулируемыми по длине.
Источники информации, принятые во внима няе прк экспертизе. .
1.Авторское свидетельство СССР N 365421, кл. Е 02 О 7/14, 1973.
2.Авторское свидетельство СССР №440474,
.1 т тшштш ш
фиг. /
фи. 2
фиг. 5
. --....v.,/.. t
; ., / .
-ж iU J « vf«
;.....л, 
| название | год | авторы | номер документа |
|---|---|---|---|
| Свайный копер | 1985 |
|
SU1286678A1 |
| Копер для забивки свай | 1972 |
|
SU440474A1 |
| КОПРОВАЯ УСТАНОВКА | 1998 |
|
RU2139976C1 |
| Свайный копер | 1988 |
|
SU1604928A2 |
| КОПРОВАЯ УСТАНОВКА | 2012 |
|
RU2505645C1 |
| Свайный копер | 1987 |
|
SU1444474A2 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ УДАРНЫМ СПОСОБОМ | 2012 |
|
RU2517267C1 |
| МОБИЛЬНЫЙ ПЕРЕНОСНОЙ КОПЕР | 2000 |
|
RU2203359C2 |
| Свайный копер | 1983 |
|
SU1188245A1 |
| СВАЙНЫЙ КОПЕР | 1997 |
|
RU2132905C1 |



г
