ты и рычага соединены между собой шаровой опорой. Приводной рычаг 6 имеет грузозахватное приспособление для извлечения штанг. Мачта 2 имеет внизу ограничитель 3 с ловушкой для сваи 28. Консоли 18 и 19 ловушки ограничивают возможное боковое отклонение сваи 28 в начальный период погружения. Щиты 7 соединены шарнир но с концом рычага 6 ниже центра их
1
Изобретение относится к строительной технике и может быть использовано в устройствах для погружения-свай, ан15ерных якорей и подобных элементов.
Цель изобретения - увеличение функциональных возможностей путем обеспечения погружения свай с большим диапазоном длин, а также анкерных якорей и извлечения их забивных штанг
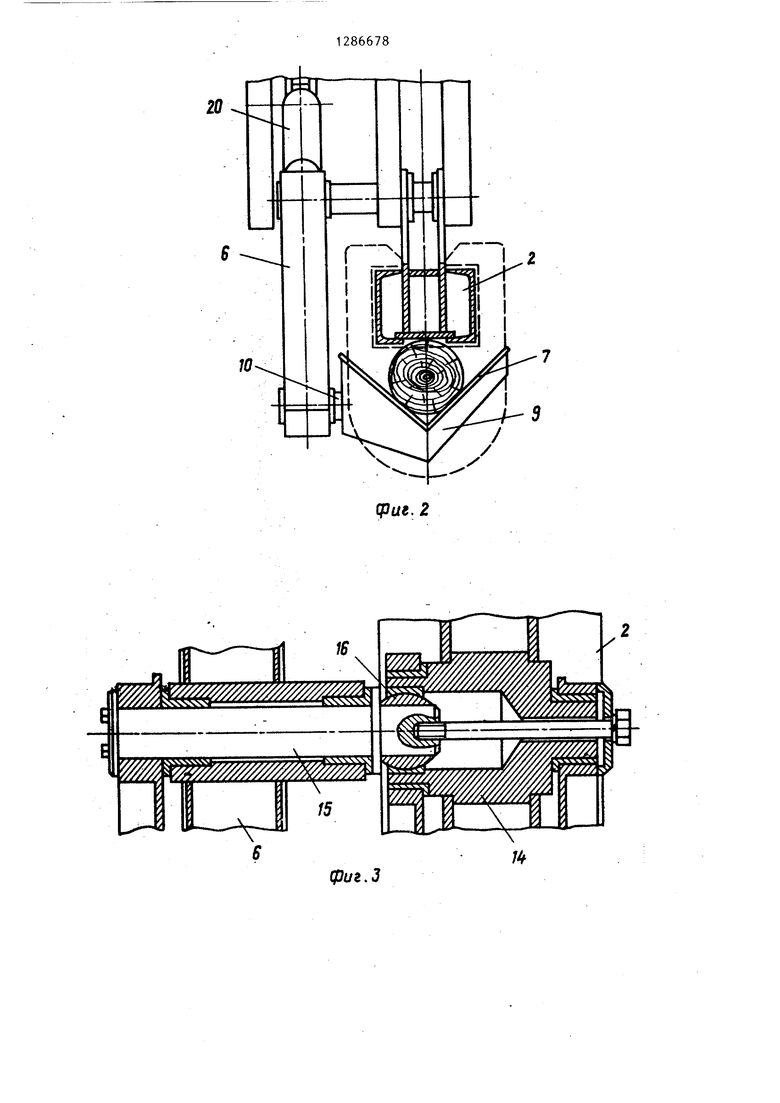
На фиг. 1 изображен свайный копер; на фиг. 2 - то же, вид сверху с зафиксированной сваей; на фиг. 3 - то же, разрез по оси мачты , на фиг. 4 - то же, разрез по оси захвата на Лиг. 5 - то же, разрез по рычагу; на фиг. 6 - свайный копер при извлечении забивных штанг; на фиг. 7 - копер, транспортное положение.
Свайный копер включает базовую машину 1, к раме которой шарнирно прикреплена мачта 2 с ограничителем 3 и фиксаторами 4 положения, молот 5, захватное устройство с приводным рычагом 6 и щитами 7, образующими с поверхностью 8 мачты 2 трехгранную призму.
Приводной рычаг 6 прикреплен к раме базовой машины шарнирно. Щиты 7 жестко соединены между собой ребрами 9 и снабжены осью 10, закрепленной выше их центра тяжести и шарнирно взаимосвязанной с концом рычага 6. Рычаг 6 снабжен грузозахватным приспособлением.
Грузозахватное приспособление выполнено в виде ряда расположенных по длине рычага 6 отверстий 11 и взаи- модействующегр с ними грузового пальца 12, который соединен с рычагом 6 гибкой связью 13.
286678
тяжести. Шарнирное крепление захват- ного устройства обеспечивает погружение свай различных длин. При погружении коротких свай рычаг 6 переводят в нижнее положение. При извлечении штанг анкерных якорей петлей охватывают штангу, палец вставляют в отверстие рычага 6,затем поворотом ры- . чага 6 извлекают штангу. 2 з.п.ф-лы, 7 ил.
0
5
0
5
0
5
0
Оси поворота мачты и рычага 14 и 15 связаны с шаровой опорой 16.
Приводной рычаг снабжен гибкой связью 17 в виде цепи с замком, соединяющей рычаг 6 с мачтой 2 при изменении ее положения.
Ограничитель 3 снабжен ловушкой для сваи, выполненной в виде консолей 18 и 19 и зеркально расположенной относительно щитов 7.
Привод рычага 6 осуществляется гидроцилиндром 20. Мачта 2 и гидроцилиндр 20 прикреплены к раме 21. Фиксатор 4 положения мачты 2 выполнен в виде талрепа.
Управление молотом 5 осуществляется лебедкой 22 через канат 23, пропущенный через блоки 24 и 25. На молоте 5 закреплен замок 26 стропа 27 для подъема сваи 28, или забивной штанги 29 анкерного якоря.
Канат 23 соединен с молотом 5 посредством быстроразъемной скобы 30.
Для извлечения забивных штанг 29 используются петля 31 и палец 32. - Копер работает следующим образом.
Для установки мачты 2 в рабочее положение включают гидроцилиндр 20. При этом поворачивается рычаг 6 и взаимосвязанная с ним цепью 17 мачта 2 до вертикального положения.
Молот 5 опускают в нижнее положение. Затем мачту 2 фиксатором 4 положения фиксируют относительно базовой машины 1 и разъединяют мачту 2 и рычаг 6, открывая замок цепи 17.
Сваю 28 охватывают стропом 27 и крепят его в замке 26.
Лебедкой 22 поднимают молот 5 со сваей 28. Затем гидроцилиндром 20 рычаг 6 поворачивают и щитами 7 прижимают и ориентируют вдоль мачты 2 сваю 28.
Затем лебедкой 22 опускают молот 5, нижний конец сваи 28 опускается н грунт, а молот 5 - на оголовник сваи 28. Для освобождения стропа 27 открывают замок 26, после чего лебедкой 22 поднимают молот 5 и сбрасывают его на сваю 28. Консоли 18 и 19 ловушки ограничивают возможное произвольное боковое отклонение сваи 28 в начальный период погружения при неоднородной структуре грунта (Наличие отдельных камней и т.п. включе-
НИИ) .
При забивке свай, не калиброванных по диаметру и имеющих местные утолщения, происходит воздействие на щиты 7 и упругая деформация ры- чага 6.
После заглубления сваи 28 при положении , ее оголовника.на уровне щитов 7 рычаг 6 со щитами 7 переводят нижнее положение и продолжают забив- ку. В нижнем положении рычага 6 со щитами 7 производят заглубление и коротких свай. Процесс заглубления анкерных якорей аналогичен.
После окончания забивки сваи 28 с нее снимают строп 27.
Извлечение забивных штанг 29 анкерных якорей выполняют следующим образом.
Опускают молот 5 в крайнее по- ложение до ограничителя 3 на консоли 18 и 19 и отсоединяют канат 23 от молота. Затем канат 23 соединяют с пальцем 32, пропущенным в отверсти забивной штанги 29. Кроме того, пет- лей 31 охватывают штангу и соединяют петлю 31 с пальцем 12 рычага 6. Палец 12 вставляют в одно из отверстий рычага 6 в зависимости от необходимого усилия (чем ближе к оси рычага усилие больше).
Затем одновременно включают лебедку 22 и гидроцилиндр 20 рычага 6.
Суммарное усилие рычага 6 и лебедки 22 необходимо для трогания штанги 29 с места, после чего гидроцилиндр 20 рычага 6 выключают и дальнейший подъем выполняют лебедкой 22.
По мере извелечения забивных штан 29 их отсоединяют от оставшихся в грунте, укладывают на землю и извлекают остальные штанги.
Формула изобретения
1. СвайнЫй копер, включающий базо вую машину, шарнирно прикрепленную к ее раме мачту с ограничителем и фиксаторами положения, установленный на | 1ачте молот, захватное устройство с приводным рычагом и щитами, образующими совместно с поверхностью мачты трехгранную призму, отли ч аю- щ и и с я тем, что, с целью увеличения функциональных возможностей путем обеспечения погружения свай с большим диапазоном длин, а также ан- керньос якорейи извлеченияих забивных штанг, приводной рычаг оснащен грузозахватным приспособлением и прикреплен к раме базовой машины, при этом оси рычага и мачты связаны между собой с помощью шаровой опоры, а щиты жестко соединены ребрами и шарнирно закреплены на конце приводного рычага вьшге их центра тяжести, причем ограничитель снабжен ловушкой для сваи.
2.Копер по п. 1, отличающийся тем, что приводной рычаг снабжен гибкой связью с замком для соединения с мачтой.
3.Копер ПОП.1, отличающий с я тем, что ловушка для сваи ограничителя выполнена в виде консолей, зеркально расположенных относительно щитов.
20
X
/
(риг. 2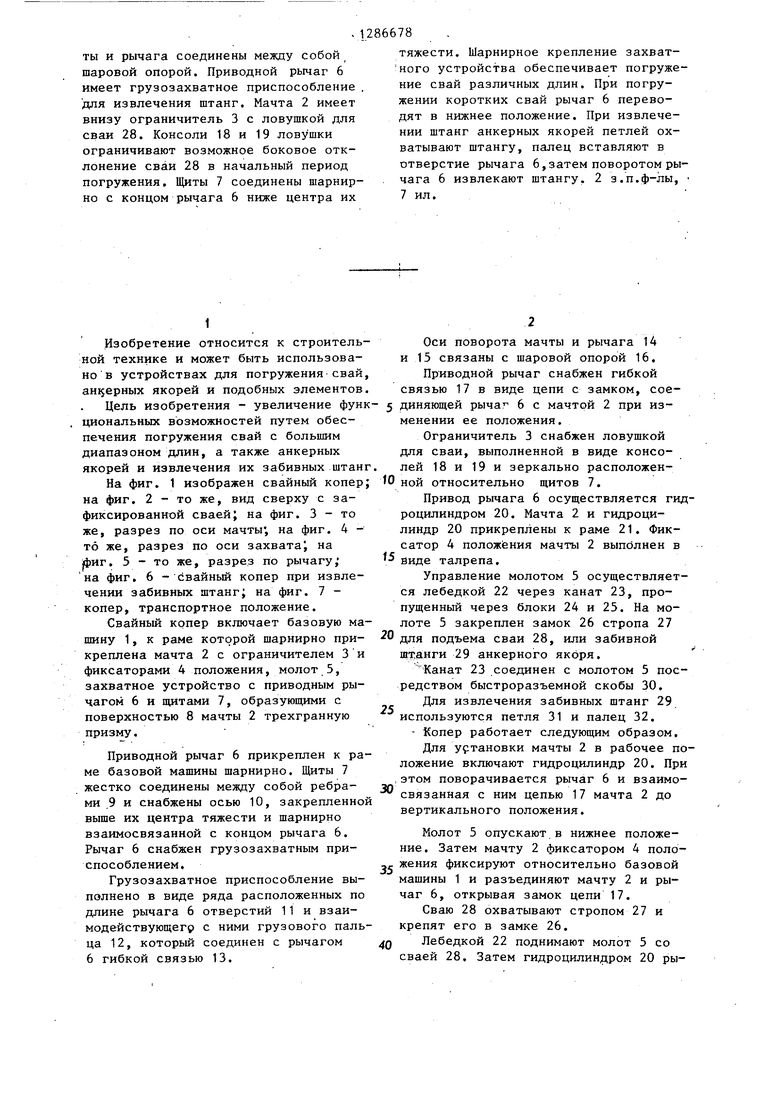

| название | год | авторы | номер документа |
|---|---|---|---|
| Свайный копер | 1988 |
|
SU1604928A2 |
| Свайный копер | 1987 |
|
SU1444474A2 |
| Свайный копер | 1983 |
|
SU1188245A1 |
| Свайный копер | 1990 |
|
SU1715978A2 |
| ПЛАВАЮЩИЙ САМОХОДНЫЙ КОПЕР | 2023 |
|
RU2815798C1 |
| Свайный копер | 1979 |
|
SU909013A1 |
| Навесной гидравлический копер для одноковшового экскаватора | 2023 |
|
RU2826885C1 |
| СВАЙНЫЙ КОПЕР | 1997 |
|
RU2132905C1 |
| Копер для забивки свай | 1986 |
|
SU1441025A1 |
| Свайный копер | 1977 |
|
SU876850A1 |


Изобретение относится к строительной технике. Цель - увеличение функциональньк возможностей путем обеспечения погружения свай с большим диапазоном длин, а также анкерных якорей и извлечения их забивных штанг. Свайный копер включает базовую машину 1, поворотную 2, захватное устройство с приво;щь1м рычагом 6 и щитами 7, молот 5. Привод- ной рычаг 6 шарнирно закреплен к ра- :ме базовой машины 1. Оси наклона мачi W К9 СХ) Од 00 Фиг,
16
Е
/тт/ут//
фиг.З
(put. 5
9 7
17
/ 22
Составитель Н.Заболоцкая Редактор Н.Кипггулинец Техред А.Кравчук Корректор С.Шекмар
;Заказ 7687/28. Тираж 606Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35,,Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
23 ФигЛ
| Патент США № 4280772 ,кл | |||
| Аппарат для передачи изображений неподвижных и движущихся предметов | 1923 |
|
SU405A1 |
| Свайный копер | 1983 |
|
SU1188245A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
