Предлагаемое изобретение относится к электротехнике и может быть использовано для управления приводными электромагнитами (ЭМ) клапанов и коммутационных аппаратов. Данное техническое решение может применяться преимущественно при решении задачи одновременного управления несколькими коммутационными аппаратами или клапанами, когда важно обеспечить их синхронную работу.
Известны способы регулирования времени срабатывания ЭМ, описанные в [1] на с. 142-144 или в [2] на с. 232-233. Эти решения предусматривают установку дополнительных элементов (индуктивностей, емкостей или сопротивлений) для снижения скорости нарастания тока в обмотке ЭМ при включении. Такие решения значительно увеличивают габариты устройства, так как требует установки элементов, рассчитанных на рабочие токи ЭМ. Кроме того, такое регулирование требует замены установленных ранее элементов, и не позволяет обеспечить автоматическое регулирование времени срабатывания. Обычно, регулирование времени срабатывания ЭМ не допускает изменения этого времени в обе стороны (как в сторону увеличения, так и уменьшения), а сводится либо к замедлению срабатывания, либо к форсированию.
Для задержки времени срабатывания ЭМ используется также и гидравлическое замедление, описанное в [3]. Такое техническое решение должно быть заложено при изготовлении ЭМ и требует наличия в конструкции герметизированной трубки, заполненной вязкой жидкостью, с размещенным в ней подвижным сердечником. Это конструктивное решение нельзя использовать для ЭМ, работающих в сложных условиях эксплуатации. Кроме того, оно не позволяет обеспечивать корректировку изменения времени срабатывания в процессе эксплуатации.
Более гибким решением являются способы регулирования времени срабатывания за счет электрического управления параметрами электронных элементов. Например, устройство, описанное в [4], позволяет снизить время срабатывания электромагнита за счет использования повышенного напряжения питания ЭМ и импульсной стабилизации напряжения на его катушке в процессе срабатывания. Такое решение свободно от описанных выше недостатков, но не позволяет регулировать время срабатывания ЭМ, изменяющееся при воздействии на него в процессе эксплуатации дестабилизирующих факторов (изменение температуры, противодействующей силы, рабочего хода).
Известен также способ регулирования времени срабатывания, реализованный в [5]. Этот способ предполагает измерение напряжения питания и шунтирование дополнительным ключом обмотки ЭМ, подключенной к источнику питания, через последовательно включенный резистор. Данное решение позволяет регулировать время срабатывания ЭМ в широких пределах, но при этом в каждом цикле срабатывания ЭМ затрачивается дополнительная энергия, значительно превышающая реально необходимую для его срабатывания.
Прототипом предлагаемого изобретения является способ регулирования времени срабатывания и устройство для его осуществления по патенту [6]. Это техническое решение обладает относительно высокой энергоэффективностью и позволяет осуществлять автоматическое регулирование времени срабатывания ЭМ в достаточно широких пределах при его отклонении от заданного значения как в сторону увеличения, так и в сторону уменьшения. Однако, это требует введения дополнительного силового устройства, содержащего большое число элементов, увеличивающих габариты устройства и снижающих его надежность.
Задачами предлагаемого изобретения являются упрощение способа и устройства и повышение надежности.
При решении задачи предлагаемого изобретения для регулирования времени срабатывания ЭМ используют широтно-импульсную модуляцию (ШИМ) напряжения, подаваемого на обмотку ЭМ, а в качестве параметра цепи питания, влияющего на время срабатывания, используют величину скважности подаваемых на обмотку импульсов напряжения. При этом, новое постоянное на цикле срабатывания значение величины скважности подаваемых на обмотку электромагнита импульсов напряжения при его последующем включении, выбирают так, чтобы уменьшить отклонение времени срабатывания от заданного значения. Причем изменение скважности импульсов напряжения перед каждым новым циклом срабатывания производят автоматически до тех пор, пока время срабатывания электромагнита не достигнет заданного значения с требуемой точностью, а проверку отклонения текущего значения времени срабатывания от заданного значения производят перед каждым новым циклом срабатывания.
Новое, постоянное на цикле срабатывания значение величины скважности, подаваемых на обмотку электромагнита импульсов напряжения при его последующем включении, можно выбирать с использованием соотношения

где S(k) - значение величины скважности на текущем k-м цикле срабатывания;
S(k+1) - значение величины скважности на следующем (k+1)-м цикле срабатывания;
Ks(k) - коэффициент, характеризующий влияние изменения величины скважности на величину времени срабатывания;
Δtсраб(k)=tсраб зад - tсраб(k);
tсраб(k) - значение величины времени срабатывания на текущем k-м цикле срабатывания;
tсраб зад - заданное значение величины времени срабатывания.
Если выбранное новое значение скважности ниже минимального предельно допустимого значения скважности, то его принимают равным минимальному предельно допустимому значению, а если выбранное новое значение скважности выше максимального предельно допустимого значения скважности, то его принимают равным максимальному предельно допустимому значению. Очевидно, что минимальное предельно допустимое значение скважности S(k) при цифровой реализации ШИМ будет S(k)=1+1/2n, где n - разрядность ШИМ. Это соответствует случаю, когда паузы между импульсами напряжения, поступающими на обмотку ЭМ, имеют минимально допустимое в используемой цифровой реализации ШИМ значение. Максимальное предельно допустимое значение скважности выбирается для каждого типа ЭМ таким, чтобы гарантировать его срабатывание при любых допустимых условиях работы.
Начальное значение скважности и начальное значение коэффициента, характеризующего влияние изменения величины скважности на величину времени срабатывания, для заданного значения величины времени срабатывания можно определять до начала работы в лабораторных или заводских условиях по экспериментально снятой зависимости величины времени срабатывания от величины скважности при номинальных условиях.
Значение коэффициента, характеризующего влияние изменения величины скважности на величину времени срабатывания, можно переопределять автоматически перед началом каждого последующего цикла срабатывания после второго в соответствии с соотношением

где tcpaб(k-1) и S(k-1) - значение величины времени срабатывания и скважности на (k-1)-м цикле срабатывания.
При этом, значение величины времени срабатывания на каждом текущем цикле срабатывания ЭМ с достаточной степенью точности можно определять как величину отрезка времени между подачей напряжения питания на обмотку и моментом времени достижения током в обмотке локального минимума при срабатывании электромагнита.
Для реализации предлагаемого способа регулирования времени срабатывания ЭМ разработано устройство. Для решения задачи предлагаемого изобретения в устройство дополнительно введены тактовый генератор, формирователь защитного интервала, широтно-импульсный модулятор, микроконтроллерное ядро, счетчик, первый и второй логические элементы НЕ, логические элементы 2И и 3И, первый и второй D-триггеры, цифровой компаратор, регистр, аналого-цифровой преобразователь, схема синхронизации и датчик тока. Причем плюсовой вывод управляемого ключа соединен с первой клеммой питания, а его управляющий вход соединен с выходом широтно-импульсного модулятора, который соединен также с входами счетчика и второго логического элемента НЕ. Выход тактового генератора соединен с тактовым входом широтно-импульсного модулятора. Положительный вывод датчика тока соединен с минусовой клеммой электромагнита, а его отрицательный вывод - с второй клеммой питания. Выход датчика тока соединен с аналоговым входом аналого-цифрового преобразователя, вход запуска которого соединен с выходом второго логического элемента НЕ, а выход готовности - с входом схемы синхронизации. Первый выход схемы синхронизации соединен с первым входом логического элемента 2И, второй выход - с первым входом логического элемента 3И, а третий выход - с входом записи регистра, вход данных которого соединен с цифровым выходом аналого-цифрового преобразователя, соединенным также с входом секции В цифрового компаратора, вход секции А которого соединен с выходом данных регистра. Первый выход цифрового компаратора соединен с входом данных первого D-триггера, а второй выход цифрового компаратора соединен с вторым входом логического элемента 3И, третий вход которого соединен с инверсным выходом второго D-триггера, прямой выход которого соединен с входом останова счета счетчика и первым дискретным входом микроконтроллерного ядра, второй дискретный вход которого соединен с клеммой управления электромагнитом, которая соединена также с входами формирователя защитного интервала и первого логического элемента НЕ, выход которого соединен с входом сброса счетчика. Входной порт микроконтроллерного ядра соединен с выходом счетчика, а его выходной порт - с входом широтно-импульсного модулятора. Причем выход формирователя защитного интервала соединен с входами сброса первого и второго D-триггеров, тактовые входы которых соединены соответственно с выходами логических элементов 2И и 3И. Второй вход логического элемента 2И соединен с инверсным выходом первого D-триггера, прямой выход которого соединен с входом данных второго D-триггера. Выход стабилизатора напряжения соединен с входами питания всех дополнительно введенных элементов схемы.
Сущность предлагаемого технического решения поясняется чертежами.
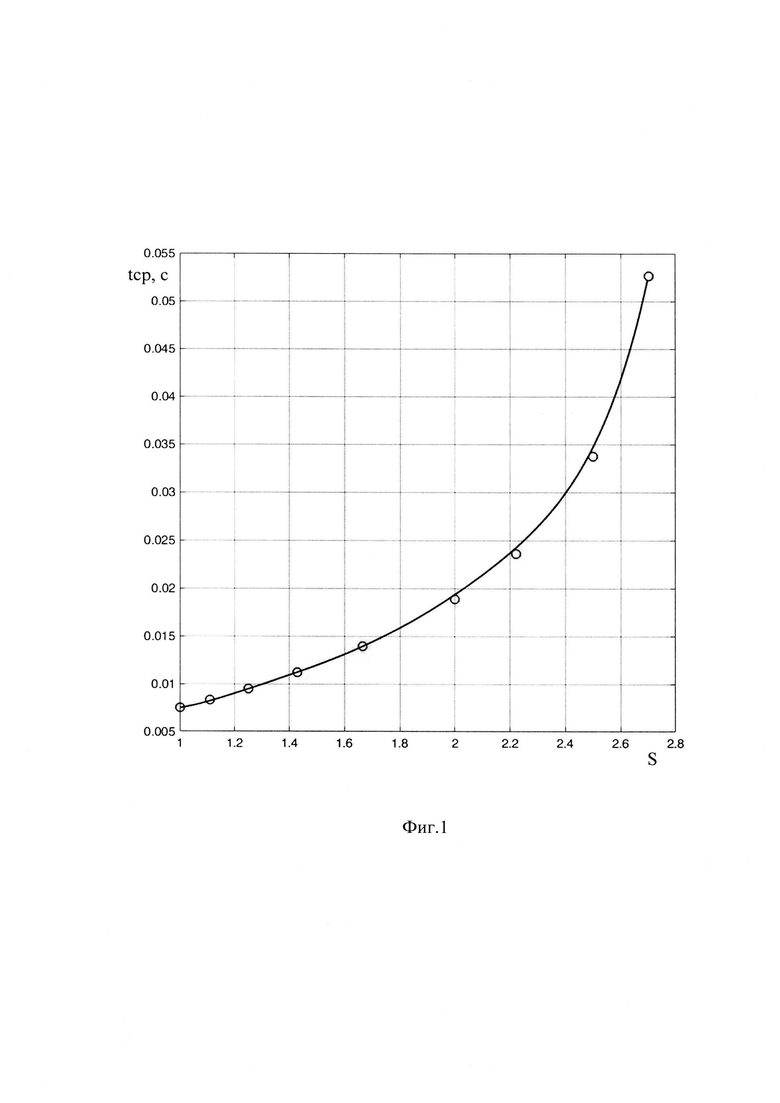
Фиг. 1. Экспериментальная и аппроксимирующая зависимости времени срабатывания ЭМ от скважности подаваемых на обмотку импульсов напряжения при номинальных условиях работы.
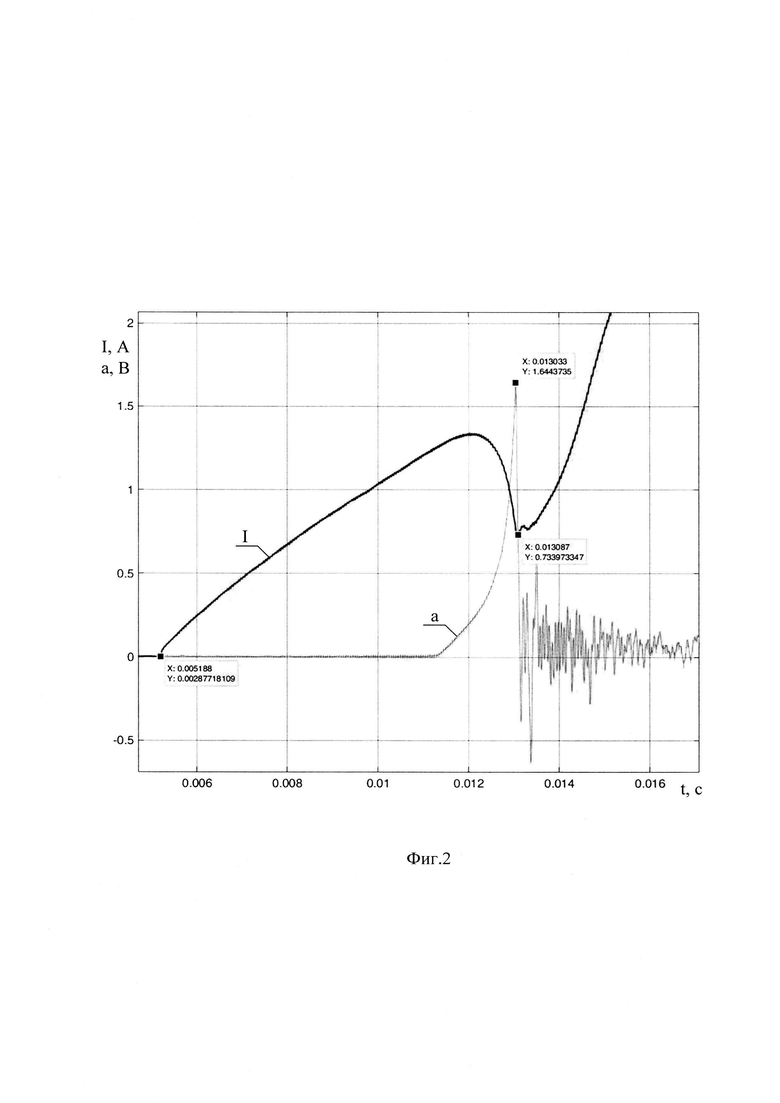
Фиг. 2. Экспериментальные переходные процессы изменения тока в обмотке ЭМ и выходного сигнала акселерометра при срабатывании ЭМ.
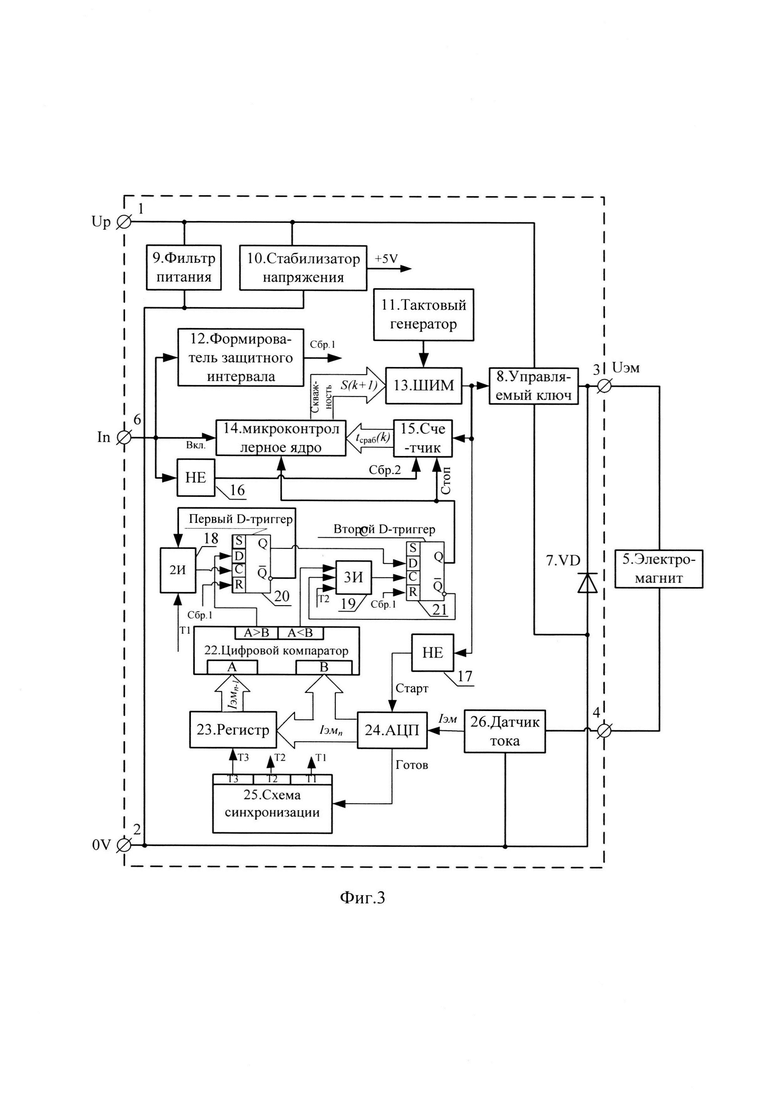
Фиг. 3. Функциональная схема предлагаемого устройства регулирования времени срабатывания ЭМ.
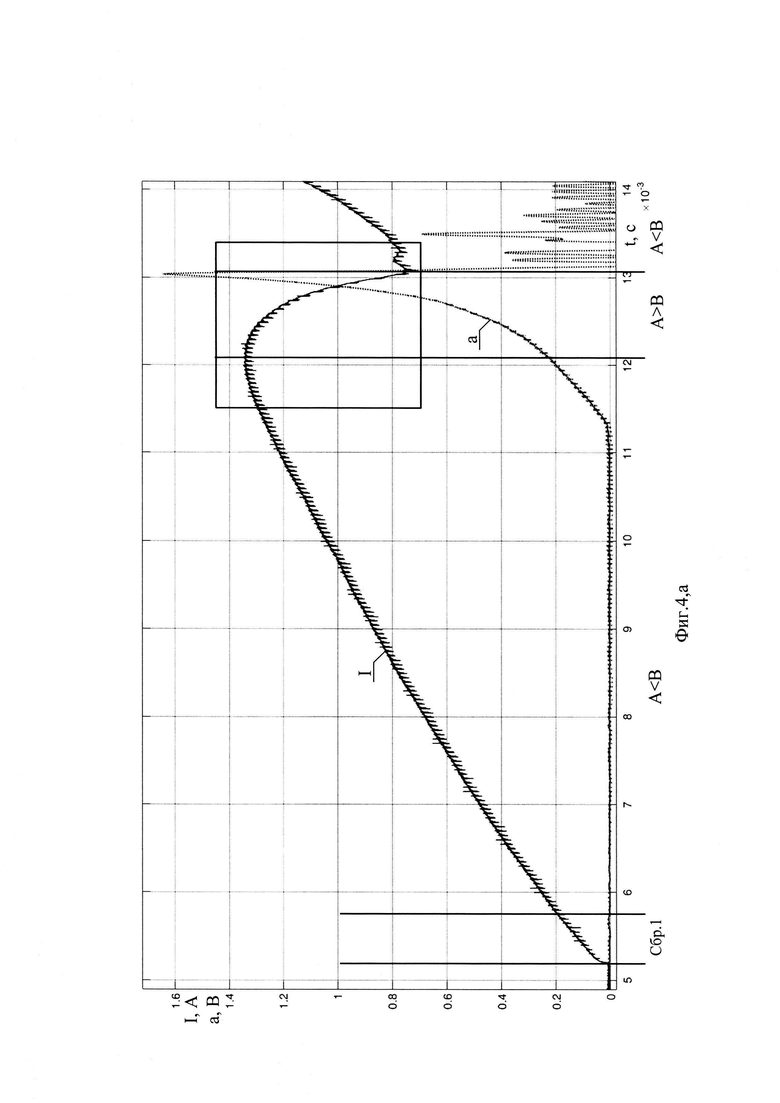
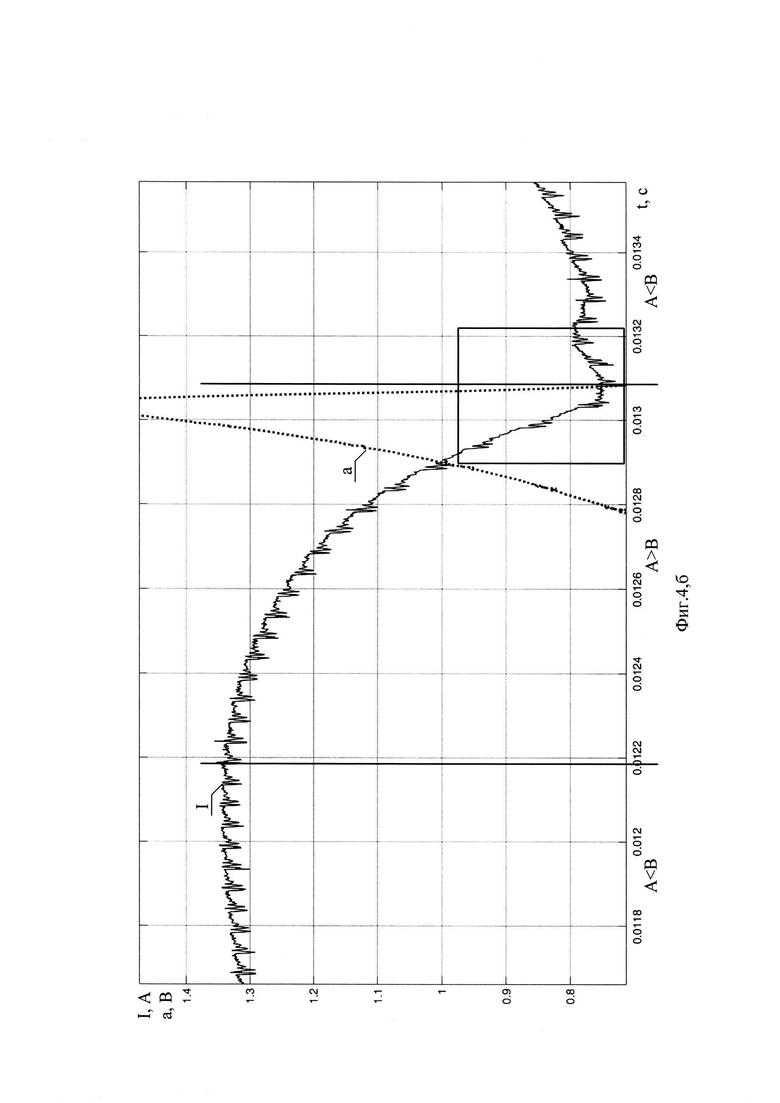
Фиг. 4, а-в. Участки экспериментального переходного процесса изменения тока в обмотке ЭМ и выходного сигнала акселерометра при срабатывании ЭМ, иллюстрирующие работу функциональной схемы.
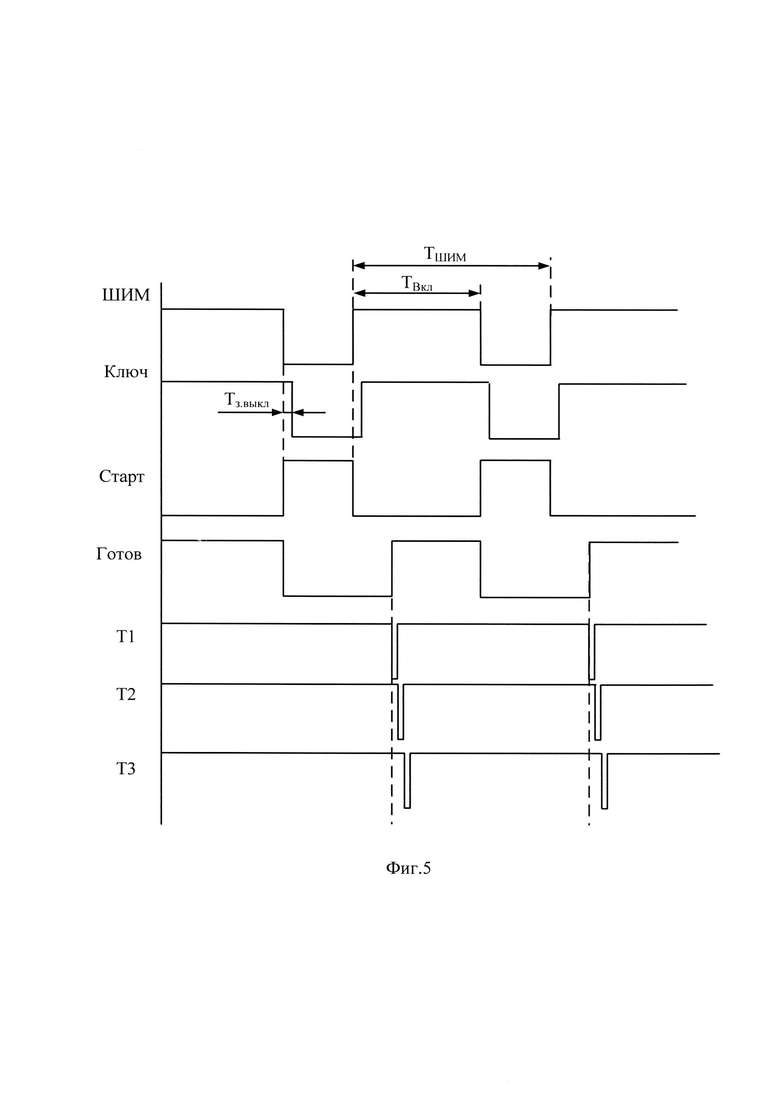
Фиг. 5. Временные диаграммы формирования сигналов управления при работе функциональной схемы предлагаемого устройства регулирования времени срабатывания ЭМ.
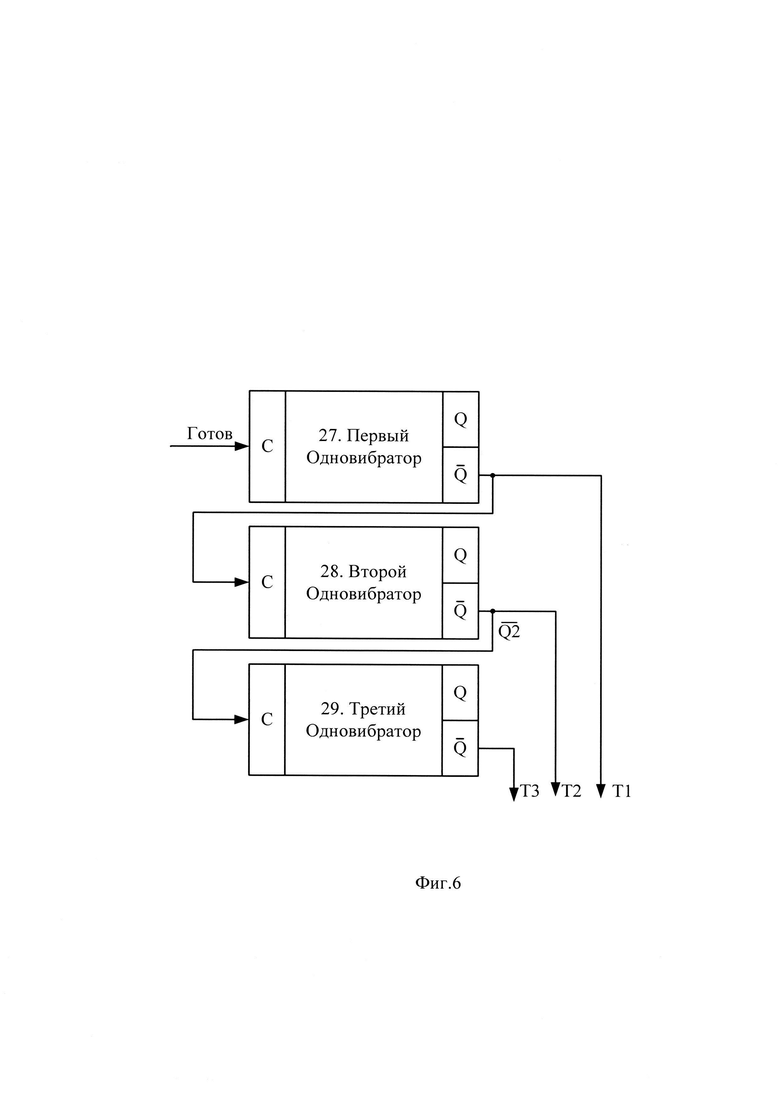
Фиг. 6. Функциональная схема возможного исполнения схемы синхронизации.
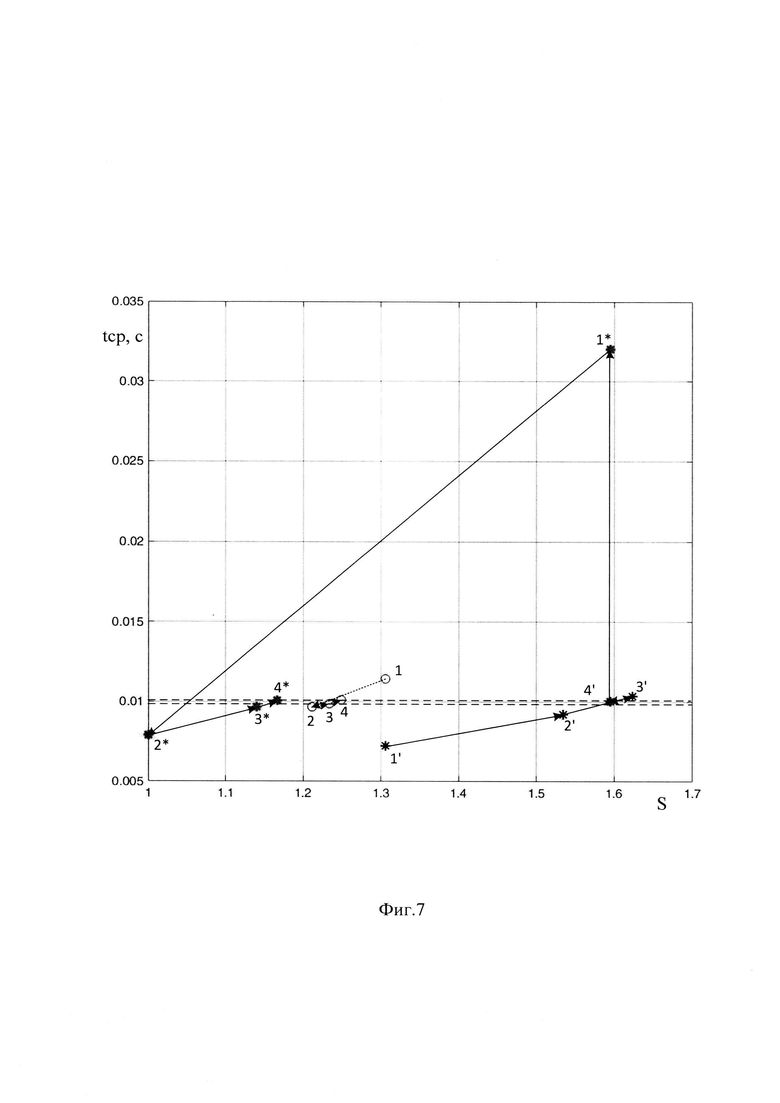
Фиг. 7 Графическая иллюстрация работы предлагаемого способа регулирования времени срабатывания ЭМ в плоскости фазовых координат S - tcp.
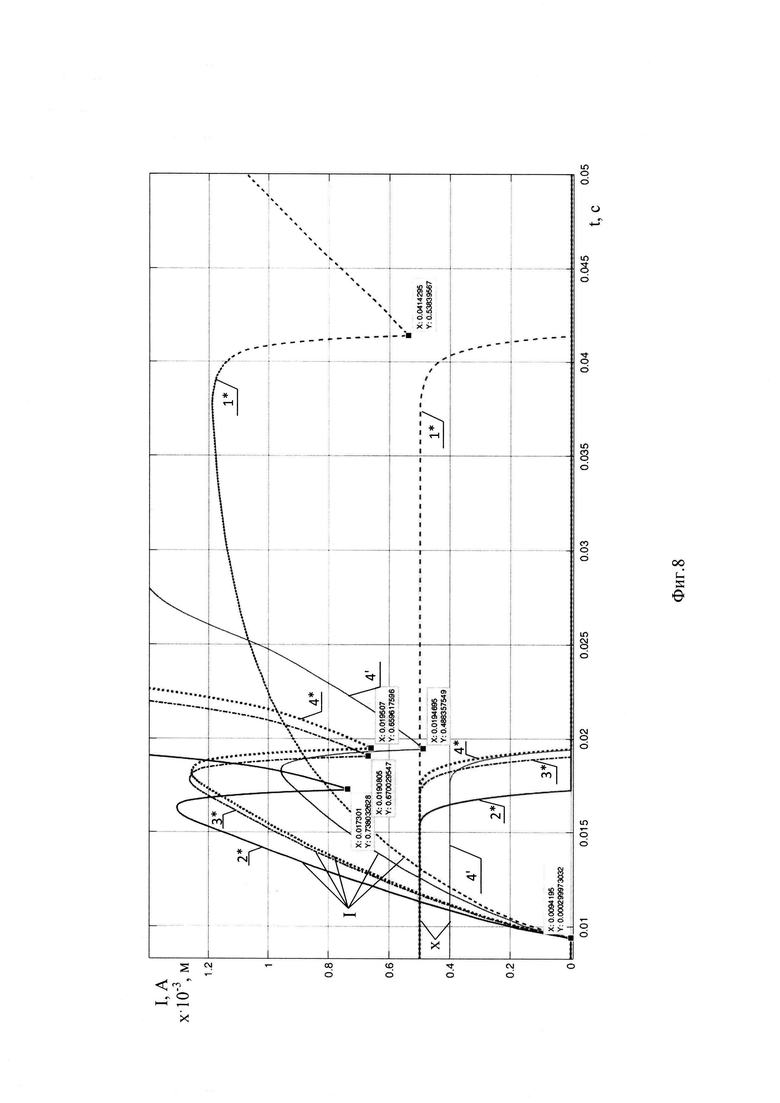
Фиг. 8. Процессы изменения тока в обмотке ЭМ и перемещения якоря ЭМ при компьютерном моделировании работы устройства, реализующего предлагаемый способ регулирования времени срабатывания ЭМ.
Как уже отмечалось, предлагаемое техническое решение основано на регулировании времени срабатывания ЭМ за счет использования ШИМ напряжения, подаваемого на обмотку ЭМ. Разработке этого решения предшествовали экспериментальные исследования, послужившие для него физической основой.
На фиг. 1 приведены экспериментальная (показанные кружочками экспериментально снятые точки) и аппроксимирующая (сплошная линия) зависимости времени срабатывания ЭМ от скважности подаваемых на обмотку импульсов напряжения при номинальных условиях работы. При этом под скважностью, как это принято в специальной литературе (см., например, [7]), будем понимать отношение периода следования импульсов к длительности импульса.
Зависимость, показанная сплошной линией на фиг. 1, получена аппроксимацией по методу наименьших квадратов экспериментальных точек полиномом шестой степени. Соответствующее этой кривой аналитическое выражение, имеет вид

где tcpaб арр - аппроксимирующее значение величины времени срабатывания при величине скважности S;
С6, C5, С4, С3, С2, С1 и С0 - постоянные коэффициенты, которые для представленной на фиг. 1 кривой имеют следующие значения: С6=0,0180; С5=-0,1782; C4=0,7346; С3=-1,5801; С2=1,8816; С1=-1,1687 и С0=0,3013.
Наряду с функцией tсраб app(S) существует обратная функция S(tcpa6 зад), которая позволяет по величине tсраб зад заданного значения времени срабатывания ЭМ определить необходимое значение скважности S подаваемых на обмотку импульсов напряжения, которое должно обеспечить требуемое значение времени срабатывания ЭМ. Таким образом, использование функции S(tcpaб зад) позволит обеспечить начальное значение скважности S(k) на первом цикле регулирования времени срабатывания с использованием соотношения (1) при k=1.
Значение первой производной этой функции dS(tсраб)/dtсраб при tсраб=tсраб зад можно использовать как начальное значение коэффициента Ks(k), характеризующего влияние изменения величины скважности на величину времени срабатывания, т.е. будем считать, что Ks(1)=dS(tсраб)/dtсраб|tсраб=tсраб зад и использовать это его значение при определении с использованием соотношения (1) значения скважности для следующего второго цикла срабатывания ЭМ. Тогда

где S(2) - значение величины скважности, устанавливаемое для второго цикла срабатывания;
Δtсраб(1)=tсраб зад - tсраб(1);
tсраб(1) - значение величины времени срабатывания, полученное на первом цикле срабатывания.
После второго цикла срабатывания ЭМ, если полученное на нем значение времени срабатывания tсраб(2) не удовлетворяет неравенству
δtсраб доп ≥ |(tсраб зад - tсраб(2))/tсраб зад|,
где δtсраб доп - допустимое значение относительной погрешности регулирования времени срабатывания ЭМ, то переопределяется значение коэффициента Ks(k), характеризующего влияние изменения величины скважности на величину времени срабатывания, с использованием соотношения (2).
Тогда Ks(2)=(S(2) - S(1))/(tcpaб(2) - tcpaб(1)) и для третьего цикла срабатывания ЭМ устанавливается значение скважности

Далее для каждого очередного (k+1)-го цикла срабатывания ЭМ будет устанавливаться новое значение скважности S(k+1) в соответствии с соотношением (1) до тех пор, пока значение времени срабатывания tсраб(k) не будет удовлетворять неравенству

Если неравенство (5) выполняется, то значение скважности для (k+1)-го цикла срабатывания ЭМ не изменяется и остается прежним, т.е. S(k+1)=S(k). Проверка соблюдения неравенства (5) производится по окончании каждого цикла срабатывания ЭМ. Если на каком-либо цикле срабатывания неравенство (5) нарушится, то для следующего цикла срабатывания будет установлено новое значение скважности, определенное с использованием соотношений (1) и (2).
Таким образом, в течение всего периода работы ЭМ будет осуществляться контроль времени срабатывания ЭМ и, при необходимости, его автоматическое регулирование.
Особого внимания заслуживает процесс определения на каждом цикле работы ЭМ значения времени срабатывания.
Проведенные экспериментальные исследования показали, что значение величины времени срабатывания можно с достаточно высокой степенью точности определять как величину отрезка времени между подачей напряжения питания на обмотку и моментом времени достижения током в обмотке локального минимума при срабатывании ЭМ. Начало отрезка времени, определяемого как время срабатывания ЭМ, приходится на момент подачи напряжения на обмотку ЭМ для осуществления его срабатывания. Конец же этого отрезка времени приходится на момент достижения якорем ЭМ его конечного положения, которое он занимает после срабатывания ЭМ. Будем считать, что это момент первого соприкосновения якоря со стопом, так как экспериментально установлено, что после удара якоря о стоп могут происходить один или несколько отскоков якоря от стопа до достижения окончательной фиксации якоря в положении, соответствующем полному срабатыванию.
При проведении экспериментальных исследований механическое перемещение якоря контролировалось с помощью сигнала с выхода акселерометра, жестко связанного с якорем и ориентированного так, что его ось чувствительности параллельна направлению перемещения якоря. При этом с момента начала движения якоря сигнал на выходе акселерометра быстро нарастает, а в момент первого соприкосновения якоря со стопом резко падает и меняет знак.
На фиг. 2 приведены экспериментальные переходные процессы изменения тока I в обмотке ЭМ и выходного сигнала акселерометра а при срабатывании ЭМ во время одного из проведенных экспериментов. Для этого эксперимента напряжение источника питания составляло 28 В, период следования импульсов напряжения, подаваемых на обмотку ЭМ - 0,00005 с, их скважность S=1,1111. Толстой сплошной линией показан процесс изменения тока, а тонкой - процесс изменения выходного сигнала акселерометра. На графиках фиг. 2 выделены точки, которые отражают характерные моменты времени процесса срабатывания ЭМ: момент подачи напряжения на обмотку, момент первого соприкосновения якоря со стопом и момент достижения током в обмотке локального минимума. Видно, что время срабатывания ЭМ составляет tсраб=0,007845 с. При этом относительная погрешность его определения с использованием информации о моменте времени достижения током в обмотке локального минимума составляет 0,69%. Это вполне приемлемый результат для использования его в процессе регулирования времени срабатывания ЭМ. Экспериментальные исследования показали, что относительная погрешность определения времени срабатывания ЭМ с использованием момента времени достижения током в обмотке локального минимума при регулировании времени срабатывания экспериментального образца ЭМ в пределах от 0,0055 с до 0,055 с составила от 0,65% до 1,27%. Таким образом, данный способ определения времени срабатывания ЭМ может быть рекомендован для практического применения.
Функциональная схема устройства, реализующего предложенный способ регулирования времени срабатывания ЭМ, приведена на фиг. 3.
Устройство содержит (см. фиг. 3) первую 1 и вторую 2 клеммы питания, соединенные соответственно с положительным и отрицательным выводами источника постоянного напряжения, две клеммы 3 и 4 для подключения обмотки электромагнита 5, клемму управления электромагнитом 6, диод 7, управляемый ключ 8, фильтр питания 9 и стабилизатор напряжения 10, причем анод диода 7, отрицательные выводы фильтра питания 9, стабилизатора напряжения 10 и управляемого ключа 8 соединены со второй клеммой питания 2, катод диода 7 и выход управляемого ключа 8 соединены с плюсовой клеммой 3 электромагнита 5. Положительный вывод фильтра питания 9 и вход стабилизатора напряжения 10 соединены с первой клеммой питания 1. Устройство также содержит тактовый генератор 11, формирователь защитного интервала 12, широтно-импульсный модулятор (ШИМ) 13, микроконтроллерное ядро 14, счетчик 15, первый 16 и второй 17 логические элементы НЕ, логические элементы 2И 18 и 3И 19, первый 20 и второй 21 D-триггеры, цифровой компаратор 22, регистр 23, аналого-цифровой преобразователь (АЦП) 24, схема синхронизации 25 и датчик тока 26. Причем плюсовой вывод управляемого ключа 8 соединен с первой клеммой питания 1, а его управляющий вход соединен с выходом ШИМ 13, положительный вывод датчика тока 26 соединен с минусовой клеммой 4 электромагнита 5, а его отрицательный вывод - с второй клеммой питания 2. Выход датчика тока 26 соединен с аналоговым входом АЦП 24, вход запуска которого соединен с выходом второго логического элемента НЕ 17, а выход готовности - с входом схемы синхронизации 25, первый выход которой соединен с первым входом логического элемента 2И 18, второй выход - с первым входом логического элемента 3И 19, а третий выход - с входом записи регистра 23, вход данных которого соединен с цифровым выходом АЦП 24, соединенным также с входом секции В цифрового компаратора 22, вход секции А которого соединен с выходом данных регистра 23. Первый выход цифрового компаратора 22 соединен с входом данных первого D-триггера 20. Второй выход цифрового компаратора 22 соединен с вторым входом логического элемента ЗИ 19, третий вход которого соединен с инверсным выходом второго D-триггера 21, прямой выход которого соединен с входом останова счета счетчика 15 и первым дискретным входом микроконтроллерного ядра 14, второй дискретный вход которого соединен с клеммой управления электромагнитом 6, которая соединена также с входами формирователя защитного интервала 12 и первого логического элемента НЕ 16, выход которого соединен с входом сброса счетчика 15. Входной порт микроконтроллерного ядра 14 соединен с выходом счетчика 15, а его выходной порт с входом ШИМ 13. Причем выход формирователя защитного интервала 12 соединен с входами сброса первого 20 и второго 21 D-триггеров, тактовые входы которых соединены соответственно с выходами логических элементов 2И 18 и 3И 19. Второй вход логического элемента 2И 18 соединен с инверсным выходом первого D-триггера 20, прямой выход которого соединен с входом данных второго D-триггера 21. Выход стабилизатора напряжения +5V соединен с входами питания всех дополнительно введенных элементов схемы.
Датчик тока 26 обеспечивает преобразование тока ЭМ 5 в напряжение, размах которого соответствует входному диапазону АЦП 24 (используется АЦП последовательного приближения).
Работа схемы начинается с получения сигнала на включение ЭМ 5 на входную клемму 6 устройства. При этом по команде микроконтроллерного ядра 14 в ШИМ 13 загружается значение скважности S(k). при этом, с указанной скважностью начинает работать управляемый ключ 8,вызывая рост тока в обмотке ЭМ 5. Характер изменения тока в обмотке ЭМ 5 приведен на фиг. 4, а-в. По сигналу, поступающему на клемму управления электромагнитом 6, снимается сигнал «Сбр. 2» с входа сброса счетчика 15, и формирователь защитного интервала 12 формирует импульс сброса «Сбр. 1», длительностью Тзи ≤ 0,1 Тмин ср, где Тмин ср - минимально возможное время срабатывания ЭМ при любых допустимых условиях его работы. Этот сигнал «Сбр. 1» (отрезок времени действия этого сигнала показан на фиг. 4, а) удерживает выходы первого и второго D-триггеров 20 и 21 в состоянии логического 0 независимо от состояния других сигналов на их входах. С появлением заднего фронта сигнала на выходе ШИМ 13 запускается преобразование сигнала с выхода датчика тока 26. С выхода ШИМ 13 поступает сигнал на открытие управляемого ключа 8 и одновременно через второй логический элемент НЕ 17 сигнал «Старт» на вход запуска преобразования АЦП 24. При снятии сигнала с управляющего входа ключа происходит запуск преобразования АЦП 24. При этом, за время задержки выключения управляемого ключа 8, составляющее, например, для ключа AUIPS7221R [8] 2 мкс, происходит захват текущего значения уровня сигнала с выхода датчика тока 26 схемой выборки и хранения (СВХ), входящей в состав АЦП 24, и ее отключение от выхода датчика тока 26, и начинается преобразование аналогового сигнала в цифровой код. Моменты выборки аналогового сигнала показаны на фиг. 4, в штриховыми линиями. Выбор моментов захвата перед отключением управляемого ключа, синхронно с работой ШИМ обеспечивает необходимую помехозащищенность метода. При частоте ШИМ 20 кГц частота преобразования АЦП 24 должна быть не менее 100 кГц, и время отключения СВХ от источника сигнала составлять меньше половины времени задержки включения ключа, то есть не более 1 мкс, что выполняется для большинства АЦП. По окончании преобразования, одновременно с появлением результата на выходе готовности АЦП 24, формируется сигнал «Готов», по которому запускается схема синхронизации 25, формирующая на своих выходах T1, Т2 и Т3 приведенную на фиг. 5 последовательность импульсных сигналов, управляющих работой устройства. Функциональная схема возможного исполнения схемы синхронизации, приведенная на фиг. 6, может быть выполнена на трех последовательно включенных одновибраторах 27, 28 и 29. Все одновибраторы могут быть построены по одной схеме, например, приведенной в [9].
По переднему фронту сигнала Т1 проверяется выполнение условия А>В, что соответствует достижению током в обмотке ЭМ 5 локального максимума. И, если это условие выполнено, на прямом выходе первого D-триггера 20 устанавливается сигнал логическая «1». На фиг. 4, а, б выделены отрезки процесса изменения тока в обмотке ЭМ 5, для которых выполняются условия А>В и А<В соответственно.
По переднему фронту сигнала Т2, при наличии сигнала логическая «1» на прямом выходе первого D-триггера 20, проверяется выполнение условия А<В, которое соответствует достижению током в обмотке ЭМ 5 локального минимума. И, при выполнении этого условия, на прямом выходе второго D-триггера 20 устанавливается сигнал логическая «1».
По сигналу Т3 выполняется запись результата преобразования АЦП 24 в текущем такте ШИМ 13 в регистр 23 для его сравнения в цифровом компараторе 22 на последующем такте с новым значением тока в обмотке ЭМ 5.
В каждом периоде ШИМ 13 по окончании преобразования АЦП 24 по переднему фронту сигнала «Готов» формируется сигнал Т1, по нарастающему фронту которого на выход Q первого D-триггера 20 запишется значение со входа D соответствующее состоянию А>В первого выхода цифрового компаратора 22.
Таким образом логическая «1» на прямом выходе Q первого D-триггера 20 появится в начале падающего участка тока. Одновременно на его инверсном выходе Q появиться логический «0», который, поступив на второй вход логического элемента 2И 18, запретит прохождение тактовых импульсов Т1 на тактовый вход С первого D-триггера 20. После окончания падающего участка сигнала Т1, при первом появлении на втором выходе (А<В) цифрового компаратора 22 сигнала логической «1», соответствующего достижению локального минимума и началу второго нарастающего участка тока в обмотке ЭМ 5, тактовый сигнал Т2 пройдет через логический элемент 3И 19 на тактовый вход С второго D-триггера 21. При наличии логической «1» на входе данных второго D-триггера 21, по переднему фронту сигнала Т2 на прямом выходе второго D-триггера 21 появится сигнал «Стоп», который остановит работу счетчика 15 периодов ШИМ 13. Это значение одновременно с формированием сигнала «Стоп», поступает в микроконтроллерное ядро 14, где время срабатывания ЭМ 5 определяется как tcpaб(k)=(N-1)*TШИМ, где N - число периодов ШИМ, подсчитанное счетчиком, а ТШИМ - период ШИМ.
Микроконтроллерное ядро 14 содержит арифметико-логическое устройство, а также память данных и память программ. В нем выполняются расчеты необходимые для реализации заявляемого способа.
В качестве цифрового компаратора может быть использована, например, микросхема 555СП1 [10] или ее аналог SN7485 (page 7-57 в [11]). Регистр может быть выполнен, например, на двух микросхемах КМ155ТМ5, объединяющих в себе четыре D-триггера, или на ее аналоге SN54L77 (page 7-35 в [11]), а в качестве элемента 2И - микросхема 1594ЛИ1Т [12]. Элемент НЕ может быть выполнен на микросхеме 1594ЛН1Т [13]. Элемент 3И может быть выполнен на микросхеме 1594ЛИ3Т [12].
Датчик тока 26 состоит из низкоомного резистора, включенного последовательно в цепь обмотки ЭМ 5, и операционного усилителя, например MCP6V02-E/SN/ [14].
Микроконтроллерное ядро 14, счетчик 15, формирователь защитного интервала 12, АЦП 24 и модуль ШИМ 13 могут быть выполнены, например, на соответствующих элементах микроконтроллера PIC16F1824 [15].
Наиболее перспективным решением может быть реализация всего предлагаемого устройства, кроме силовых элементов, на одной полузаказной микросхеме аналого-цифровой базовый матричный кристалл (БМК) 5400ТР105 [16].
Проверку работоспособности и эффективности предлагаемого технического решения проведем с использованием метода компьютерного моделирования.
При включении ЭМ 5 на первом цикле срабатывания устанавливаем значение скважности, соответствующее заданному значению времени срабатывания, с использованием аппроксимирующей зависимости времени срабатывания ЭМ от скважности подаваемых на обмотку импульсов напряжения при номинальных условиях работы, показанной на фиг. 1.
Например, если заданное значение времени срабатывания tcpa6 зад=0,01 с, то требуется установить значение скважности S=1,306. Тогда при номинальных условиях работы (напряжение питания U=28 В и начальный зазор ЭМ х=0,5 мм) при этом установленном значении скважности мы должны получить на текущем цикле срабатывания ЭМ заданное значение времени срабатывания. Будем считать, что условия работы у нас изменились и отличаются от номинальных. Пусть напряжение питания упало до 25 В, а начальный зазор ЭМ стал больше х=0,6 мм. Такое изменение условий работы должно привести к увеличению времени срабатывания ЭМ. Компьютерное моделирование дает результат tcpa6(1)=0,011142 с. Это при начальном значении скважности S(1)=1,306. Этому результату компьютерного моделирования цикла срабатывания ЭМ (см. фиг. 7) соответствует точка «1» на плоскости фазовых координат S - tср.
Предположим задано, что допустимое значение относительной погрешности регулирования времени срабатывания ЭМ δtcpaб доп=1%. Мы для первого цикла
Срабатывания имеем |Δtcpaб(1)/tcpaб зад|=|(tсраб зад - tсраб(1))/tсраб зад|=11,42%> δtсраб доп.
Тогда в соответствии с соотношением (4) для следующего цикла срабатывания ЭМ мы должны установить значение скважности
S(2)=S(1)+Ks(1)Δtcpa6(1)=1,306+83,0(-0,001142)=1,2112;
так как для аппроксимирующей зависимости, показанной на фиг. 1,
Ks(1)=dS(tсраб)/dtсраб|/tсраб=tсраб зад=83,0;
a Δtcpa6(1)=tсраб зад - tсраб(1)=0,01 - 0,011142=-0,001142.
Компьютерное моделирование второго цикла срабатывания ЭМ при установленном значении скважности S=S(2) дает результат tcpa6(2)=0,00965 с, что соответствует точке «2» на графике фиг. 7. Тогда
|Δtcpaб(2)/tcpaб зад|=|(tсраб зад - tсраб(2))/tсраб зад|=3,5%> δtсраб доп.
А значит, требуется опять переопределение значения скважности на следующем цикле срабатывания ЭМ. В соответствии с описанным способом регулирования времени срабатывания ЭМ после второго цикла срабатывания требуется переопределение коэффициента, характеризующего влияние изменения величины скважности на величину времени срабатывания. Используя соотношение (2), имеем Ks(2)=(S(2)-S(1))/(tcpa6(2)-tcpa6(1)=(1,2112-1,306)/(0,00965-0,011142)=63,54. Тогда S(3)=S(2)+Ks(2)Δtcpa6(2)=1,2112+63,54(0,01 - 0,00965)=1,2334.
Компьютерное моделирование третьего цикла срабатывания ЭМ при установленном значении скважности S=S(3) дает результат tcpaб(3)=0,009856 с, что соответствует точке «3» на графике фиг. 7.
Тогда |Δtсраб(3)/tсраб зад|=|(tсраб зад - tсраб(3))/tсраб зад|=1,44% > δtсраб доп.
Для следующего четвертого цикла срабатывания:
Ks(3)=(S(3)-S(2))/(tcpa6(3)-tcpa6(2))=(1,2334-1,2112)/(0,009856-0,00965)=107,77. Тогда S(4)=S(3)+Ks(3)Δtcpa6(3)=1,2334+107,77(0,01-0,009856)=1,2489.
Компьютерное моделирование четвертого цикла срабатывания ЭМ при установленном значении скважности S=S(4) дает результат tcpaб(4)=0,010098 с, что соответствует точке «4» на графике фиг. 7.
Тогда |Δtcpa6(4)/tcpa6 зад|=|(tсраб зад - tcpa6(4))/tсраб зад|=0,98% < δtсраб доп. То есть заданная точность регулирования времени срабатывания достигнута.
Рассмотрим еще один пример компьютерного моделирования работы предлагаемого устройства, реализующего заявляемый способ. Для этого примера выберем такие отличные от номинальных условия работы, которые приводят к уменьшению времени срабатывания. Пусть напряжение питания возросло до 30 В, а начальный зазор ЭМ стал меньше х=0,4 мм. Тогда компьютерное моделирование дает результат tcpaб(1)=0,007258 с при начальном значении скважности S(1)=1,306, что соответствует точке «1'» на графике фиг. 7. Для первого цикла срабатывания имеем |Δtсраб(1)/tсраб зад|=27,42% > δtcpaб доп. Далее, аналогично первому рассмотренному примеру, в соответствии с предлагаемым способом осуществляем изменение скважности в последующих циклах срабатывания:
2) S(2)=S(1)+Ks(1)Δtcpa6(1)=1,306+83,0(0,01-0,007258)=1,5336. Получаем компьютерным моделированием tcpaб(2)=0,009225 с, что соответствует точке «2'» на графике фиг. 7. Тогда |Δtcpa6(2)/tcpa6 зад|=7,75% > δtcpa6 доп.
3) Ks(2)=(S(2)-S(1))/(tcpa6(2)-tcpa6(1))=(1,5336-l,306)/(0,009225-0,007258)=115,74. Тогда S(3)=S(2)+Ks(2)Δtcpa6(2)=1,5336+115,74(0,01-0,009225)=1,6234. Получаем компьютерным моделированием tcpa6(3)=0,010367 с, что соответствует точке «3'» на графике фиг. 7. Тогда |Δtcpa6(2)/tcpa6 зад|=3,67% > δtсраб доп.
4) Ks(3)=(S(3)-S(2))/(tcpa6(3)-tcpa6(2))=(1,6234-1,5336)/(0,010367-0,009225)=78,63. Тогда S(4)=S(3)+Ks(3)*tcpa6(3)=1,6234+78,63(0,01-0,010367)=1,5946. Получаем компьютерным моделированием tсраб(4)=0,010038 с, что соответствует точке «4'» на графике фиг.7. Тогда |Δtсраб(4)/tсраб зад|=0,38% < δtсраб доп. То есть заданная точность регулирования времени срабатывания достигнута.
На фиг. 8 приведены полученные методом компьютерного моделирования переходные процессы изменения тока I в обмотке ЭМ и перемещения якоря х при срабатывании в разных условиях работы. Обозначения переходных процессов на фиг. 8 соответствуют обозначениям циклов срабатывания ЭМ, принятым на фиг. 7. Так обозначение переходных процессов «4'» соответствует значениям параметров ЭМ, выбранным при компьютерном моделировании цикла срабатывания ЭМ, обозначенного точкой «4'» на графике фиг. 8.
А теперь предположим, что после достигнутой точности регулирования времени срабатывания через какое-то количество рабочих циклов внезапно изменились условия работы: напряжение питания упало до 25 В, а начальный зазор ЭМ стал х=0,5 мм и увеличилась на 15% нагрузка на якорь ЭМ при срабатывании. Тогда в следующем цикле работы, который будет первым для следующего этапа регулирования времени срабатывания, будем иметь S(1)=1,5946; Ks(1)=78,63. Получаем компьютерным моделированием tcpaб(1)=0,03201 с, что соответствует точке «1*» на графике фиг. 7. Соответствующие переходные процессы изменения тока в обмотке и перемещения якоря ЭМ в этом цикле срабатывания приведены на графиках фиг. 8. В результате мы переместились на фазовой плоскости из точки «4'» в точку «1*». Эти точки соответствуют одинаковому значению скважности S=1,5946. После первого цикла срабатывания на следующем этапе регулирования времени срабатывания имеем |Δtсраб(1)/tсраб зад|=220,1% > δtсраб доп, т.е. заданное внезапное изменение условий работы привело к увеличению времени срабатывания более чем в 3 раза.
Рассчитываем значение скважности для следующего цикла срабатывания:
S(2)=S(1)+Ks(1)Δtcpaб(1)=1,5946+78,63(0,01-0,03201)=-0,1360. Поскольку задаваемое значение скважности подаваемых на обмотку импульсов напряжения не может быть меньше 1, приближенно без учета разрядности возможной цифровой реализации ШИМ принимаем S(2)=1. Компьютерным моделированием получаем tсраб(2)=0,007882 с, что соответствует точке «2*» на графике фиг. 7. Соответствующие переходные процессы изменения тока в обмотке и перемещения якоря ЭМ в этом цикле срабатывания приведены на графиках фиг. 8.
Тогда |Δtcpa6(2)/tcpa6 зад|=21,18% > δtсраб доп. То есть относительная погрешность регулирования времени срабатывания на текущем цикле срабатывания уменьшилась практически в 10 раз.
Продолжаем процесс регулирования времени срабатывания дальше. Для следующих циклов срабатывания получим:
3) Ks(2)=(S(2)-S(1))/(tcpa6(2)-tcpa6(1))=(1,0-1,5946)/(0,007882-0,03201)=24,65. Тогда S(3)=S(2)+Ks(2)Δtcpa6(2)=1,0+24,65(0,01-0,007882)=1,1403. Получаем компьютерным моделированием tсраб(3)=0,009661 с, что соответствует точке «3*» на графике фиг. 7. Соответствующие переходные процессы изменения тока в обмотке и перемещения якоря ЭМ в этом цикле срабатывания приведены на графиках фиг. 8. Тогда |Δtcpaб(2)/tcpaб зад|=3,39% > δtсраб доп.
4) Ks(3)=(S(3)-S(2))/(tcpa6(3)-tcpa6(2))=(1,1403-1,0)/(0,009661-0,007882)=78,70. Тогда S(4)=S(3)+Ks(3)Δtcpa6(3)=1,1403+78,70(0,01-0,009661)=1,1667. Получаем компьютерным моделированием tcpaб(4)=0,010088 с, что соответствует точке «4*» на графике фиг.7. Соответствующие переходные процессы изменения тока в обмотке и перемещения якоря ЭМ в этом цикле срабатывания приведены на графиках фиг. 8. Тогда |Δtсраб(4)/tсраб зад|=0,88% < δtcpaб доп. То есть заданная точность регулирования времени срабатывания опять достигнута за четыре цикла срабатывания.
Приведенные результаты компьютерного моделирования подтверждают работоспособность заявляемого технического решения и демонстрируют его устойчивую и надежную работу в разных ситуациях при регулировании времени срабатывания ЭМ для любого знака и любого рассмотренного диапазона отклонения от заданного значения. Заявляемое техническое решение позволяет эффективно решать задачу регулирования времени срабатывания ЭМ, независимо от причин вызывающих отклонение времени срабатывания от заданного значения.
Таким образом, предлагаемое техническое решение позволяет обеспечить регулирование времени срабатывания электромагнита в широких пределах. При этом при его реализации не требуется введения в управляющее электромагнитом устройство дополнительных аппаратных средств по сравнению с обычно широко применяемыми управляющими микроконтроллерами или БМК и обязательно используемым управляющим ключом. Практически стандартный набор этих аппаратных средств при описанном их конфигурировании позволяет реализовать все операции заявляемого способа регулирования времени срабатывания ЭМ. Не требуется также введение дополнительных силовых элементов (как это сделано в решении-прототипе), которые являются наиболее нагруженными и наименее отказоустойчивыми элементами схемы. В результате достигается решение задачи предлагаемого изобретения по упрощению и повышению надежности.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Родштейн Л.А. Электрические аппараты: Учебник для техникумов. - 4-е изд., перераб. и доп. - Л. Энергоатомиздат, Ленингр. отд-ние 1989. - 304 с. с ил. ISBN 5-283-04389-4 стр. 142 - 144.
2. Сливинская А.Г. Электромагниты и постоянные магниты. Учебное пособие для студентов вузов. М. Энергия, 1972, 248 с. с ил.
3. Электромагнит с задержкой времени при срабатывании. RU 2246774 С1, 2005, бюл. №5.
4. Устройство управления электромагнитом. RU 2349978 С2, 2009, бюл. №8.
5. Устройство для регулирования времени срабатывания привода высоковольтного выключателя. RU 2285309 С1, 2006, бюл. №28.
6. Способ регулирования времени срабатывания электромагнита и устройство для его осуществления. RU 2733078 С1, бюл. №28, 30.09.2020.
7. Браммер Ю.А., Пащук И.Н. Импульсные и цифровые устройства. 7-е изд., перераб. и доп., М.: Высшая школа, 2003.
8. AUIPS7221R PWM INTELLIGENT POWER HIGH SIDE SWITCH https://.www.infineon.com/dgdl/auips7221r.pdf 2021 г
9. Одновибратор на D-триггерах, РАДИО 1984, №7.
10. Технические условия бК0.347.443-03ТУ
11. The Engineering Staff of TEXAS INSTRUMENTS INCORPORATED Semiconductor Group The TTL Data Book for Design Engineers. Second Edition TEXAS INSTRUMENTS INCORPORATED 1981 Printed in U.S.A Third Printing LCC4112 74062-116-AI.
12. Технические условия АЕЯР.431200.208-08ТУ
13. Технические условия АЕЯР.431200.208-07ТУ
14. MCP6V01/2/3 300 μA, Auto-Zeroed Op Amps 22058c.pdf www.microchip.com/product/en/MCP5V02, 2020.
15. http://wwl.microchip.com/download\en\DeviceDoc/ 40001419F.pdf
16. Аналого-цифровой БМК 5400TP105 АЕНВ.431260.544ТУ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| СПОСОБ МОНИТОРИНГА ТЕМПЕРАТУРЫ ОБМОТКИ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2718597C1 |
| Способ регулирования номинального тока управляющего электромагнита привода летательного аппарата и устройство для его осуществления | 2015 |
|
RU2606213C1 |
| ЦИФРОАНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2012 |
|
RU2485681C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2840853C1 |
| БЛОК ПИТАНИЯ БОРТСЕТИ АВТОМОБИЛЯ | 2013 |
|
RU2551661C1 |
| Цифроаналоговый преобразователь | 1989 |
|
SU1735999A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2795208C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746964C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802271C1 |

Изобретение относится к электротехнике, может быть использовано для управления приводными электромагнитами (ЭМ) клапанов и коммутационных аппаратов и применяться преимущественно при решении задачи одновременного управления несколькими коммутационными аппаратами или клапанами, когда важно обеспечить их синхронную работу. Технический результат состоит в повышении надежности и упрощении устройства. Для регулирования времени срабатывания ЭМ используют широтно-импульсную модуляцию напряжения, подаваемого на обмотку ЭМ, а в качестве параметра цепи питания, влияющего на время срабатывания, используют величину скважности подаваемых на обмотку импульсов напряжения. Изменение скважности импульсов напряжения перед каждым новым циклом срабатывания производят автоматически до тех пор, пока время срабатывания электромагнита не достигнет заданного значения с требуемой точностью, а проверку отклонения текущего значения времени срабатывания от заданного значения производят перед каждым новым циклом срабатывания. Новое постоянное на цикле срабатывания значение величины скважности подаваемых на обмотку ЭМ импульсов напряжения при его последующем включении выбирают исходя из величины скважности, принятой на предыдущем цикле, измеренного отклонения текущего значения времени срабатывания от заданного и коэффициента, характеризующего влияние изменения величины скважности на величину времени срабатывания. Значение величины времени срабатывания на каждом текущем цикле срабатывания ЭМ определяют как величину отрезка времени между подачей напряжения питания на обмотку и моментом времени достижения током в обмотке локального минимума при срабатывании ЭМ. 2 н. и 4 з.п. ф-лы, 10 ил.
1. Способ регулирования времени срабатывания электромагнита, в котором в каждом цикле срабатывания электромагнита после подачи напряжения на обмотку электромагнита измеряют время срабатывания, по окончании цикла срабатывания определяют отклонение полученного времени срабатывания от заданного значения и перед началом следующего цикла изменяют значение параметра цепи питания, влияющего на время срабатывания, отличающийся тем, что для регулирования времени срабатывания электромагнита используют широтно-импульсную модуляцию напряжения, подаваемого на обмотку электромагнита, а в качестве параметра цепи питания, влияющего на время срабатывания, используют величину скважности подаваемых на обмотку импульсов напряжения, при этом новое постоянное на цикле срабатывания значение величины скважности подаваемых на обмотку электромагнита импульсов напряжения при его последующем включении выбирают так, чтобы уменьшить отклонение времени срабатывания от заданного значения, причем изменение скважности импульсов напряжения перед каждым новым циклом срабатывания производят автоматически до тех пор, пока время срабатывания электромагнита не достигнет заданного значения с требуемой точностью, а проверку отклонения текущего значения времени срабатывания от заданного значения производят перед каждым новым циклом срабатывания.
2. Способ регулирования времени срабатывания электромагнита по п. 1, отличающийся тем, что новое постоянное на цикле срабатывания значение величины скважности подаваемых на обмотку электромагнита импульсов напряжения при его последующем включении выбирают с использованием соотношения
S(k+1)=S(k)+Ks(k)Δtсраб(k),
где S(k) - значение величины скважности на текущем k-м цикле срабатывания;
S(k+1) - значение величины скважности на следующем (k+1)-м цикле срабатывания;
Ks(k) - коэффициент, характеризующий влияние изменения величины скважности на величину времени срабатывания;
Δtсраб(k)=tсраб зад-tсраб(k);
tсраб(k) - значение величины времени срабатывания на текущем k-м цикле срабатывания;
tсраб зад - заданное значение величины времени срабатывания,
если выбранное новое значение скважности ниже минимального предельно допустимого значения скважности, то его принимают равным минимальному предельно допустимому значению, а если выбранное новое значение скважности выше максимального предельно допустимого значения скважности, то его принимают равным максимальному предельно допустимому значению.
3. Способ регулирования времени срабатывания электромагнита по п. 2, отличающийся тем, что начальное значение скважности и начальное значение коэффициента, характеризующего влияние изменения величины скважности на величину времени срабатывания, для заданного значения величины времени срабатывания определяют до начала работы по экспериментально снятой зависимости величины времени срабатывания от величины скважности при номинальных условиях.
4. Способ регулирования времени срабатывания электромагнита по п. 2, отличающийся тем, что значение коэффициента, характеризующего влияние изменения величины скважности на величину времени срабатывания, переопределяют автоматически перед началом каждого последующего цикла срабатывания после второго в соответствии с соотношением
Ks(k+1)=(S(k)-S(k-1))/(tсраб(k)-tсраб(k-1)),
где tсраб(k-1) и S(k-1) - значение величины времени срабатывания и скважности на (k-1)-м цикле срабатывания.
5. Способ регулирования времени срабатывания электромагнита по п. 1, или 2, или 3, или 4, отличающийся тем, что значение величины времени срабатывания определяют как величину отрезка времени между подачей напряжения питания на обмотку и моментом времени достижения током в обмотке локального минимума при срабатывании электромагнита.
6. Устройство для регулирования времени срабатывания электромагнита, содержащее первую и вторую клеммы питания, соединенные соответственно с положительным и отрицательным выводами источника постоянного напряжения, две клеммы для подключения обмотки электромагнита, клемму управления электромагнитом, диод, управляемый ключ, фильтр питания и стабилизатор напряжения, причем анод диода, отрицательные выводы фильтра питания, стабилизатора напряжения и управляемого ключа соединены со второй клеммой питания, катод диода и положительный вывод управляемого ключа соединены с плюсовой клеммой электромагнита, положительный вывод фильтра питания и вход стабилизатора напряжения соединены с первой клеммой питания, отличающееся тем, что в него дополнительно введены тактовый генератор, формирователь защитного интервала, широтно-импульсный модулятор, микроконтроллерное ядро, счетчик, первый и второй логические элементы НЕ, логические элементы 2И и 3И, первый и второй D-триггеры, цифровой компаратор, регистр, аналого-цифровой преобразователь, схема синхронизации и датчик тока, причем плюсовой вывод управляемого ключа соединен с первой клеммой питания, а его управляющий вход соединен с выходом широтно-импульсного модулятора, который соединен также с входами счетчика и второго логического элемента НЕ, выход тактового генератора соединен с тактовым входом широтно-импульсного модулятора, положительный вывод датчика тока соединен с минусовой клеммой электромагнита, а его отрицательный вывод - с второй клеммой питания, выход датчика тока соединен с аналоговым входом аналого-цифрового преобразователя, вход запуска которого соединен с выходом второго логического элемента НЕ, а выход готовности - с входом схемы синхронизации, первый выход которой соединен с первым входом логического элемента 2И, второй выход - с первым входом логического элемента 3И, а третий выход - с входом записи регистра, вход данных которого соединен с цифровым выходом аналого-цифрового преобразователя, соединенным также с входом секции В цифрового компаратора, вход секции А которого соединен с выходом данных регистра, первый выход цифрового компаратора соединен с входом данных первого D-триггера, а второй выход цифрового компаратора соединен с вторым входом логического элемента 3И, третий вход которого соединен с инверсным выходом второго D-триггера, прямой выход которого соединен с входом останова счета счетчика и первым дискретным входом микроконтроллерного ядра, второй дискретный вход которого соединен с клеммой управления электромагнитом, которая соединена также с входами формирователя защитного интервала и первого логического элемента НЕ, выход которого соединен с входом сброса счетчика, входной порт микроконтроллерного ядра соединен с выходом счетчика, а его выходной порт с входом широтно-импульсного модулятора, причем выход формирователя защитного интервала соединен с входами сброса первого и второго D-триггеров, тактовые входы которых соединены соответственно с выходами логических элементов 2И и 3И, второй вход логического элемента 2И соединен с инверсным выходом первого D-триггера, прямой выход которого соединен с входом данных второго D-триггера, а выход стабилизатора напряжения соединен с входами питания всех дополнительно введенных элементов схемы.
| RU 2733078 C1, 30.09.2020 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТОМ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2016 |
|
RU2636052C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ВРЕМЕНИ СРАБАТЫВАНИЯ ПРИВОДА ВЫСОКОВОЛЬТНОГО ВЫКЛЮЧАТЕЛЯ | 2005 |
|
RU2285309C1 |
| Устройство для измерения времени срабатывания электромагнитов | 1986 |
|
SU1372274A1 |
| US 3579052 A, 18.05.1971. | |||

