Устройство относится к области автоматической . сигнализации и предназначено для систем управления и контроля, в которых необходимо определить направление движения одновременно нескольких объектов, например, при автоматическом подсчете количества пассажиров, проходящих через входную дверь транспортных средств.
Известно устройство для определения направления движения, в котором необходимо использовать датчики с перекрытием зон чувствительности, что не всегда можно обеспечить 1.,
Наиболее близким по технической сущности является устройство для определения направления движения объектов, содержащее датчики, подключенные к анализаторам направления, соединенным с сумматорами прямого и обратного направления, каждый из которых выполнен на триггерах, входы которых подключены к выходу элемента ИЛИ и к выходу первого и второго элементов И, выходы третьего и четвертого элементов И соединены со входами элемента ИЛИ, подключенного к счетчикам 2.
Недостатком его является недостаточно высокая точность устройства.
Цель изобретения - повышение точности.
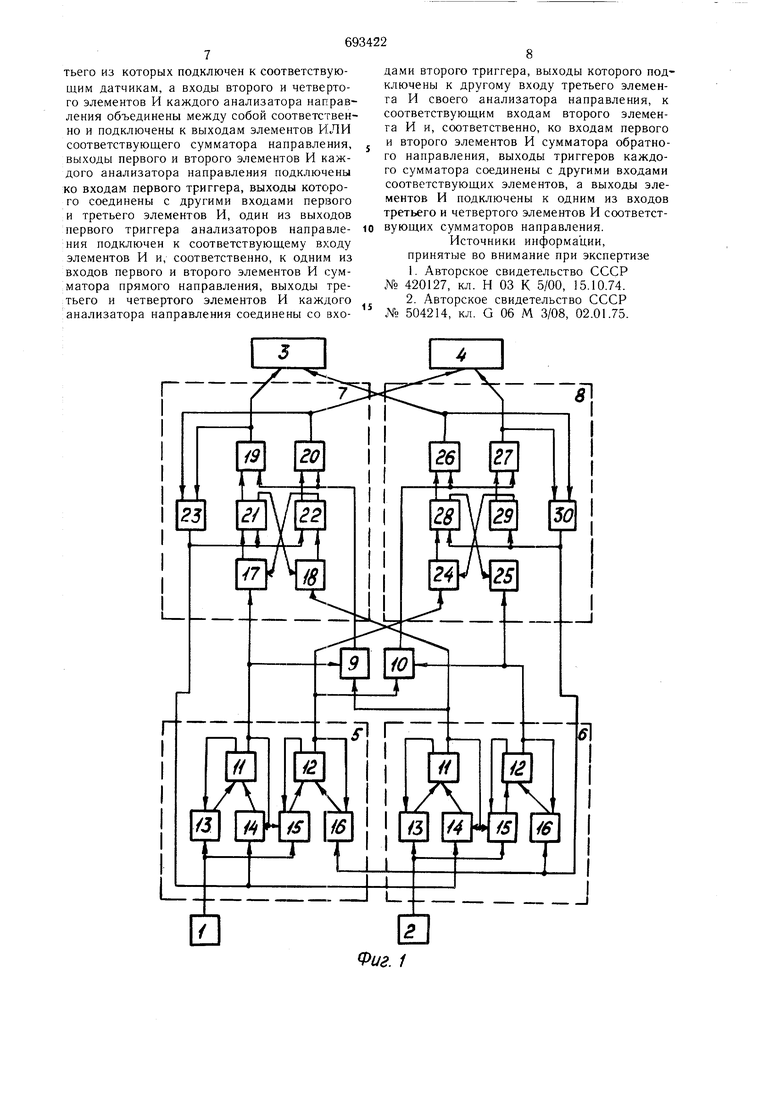
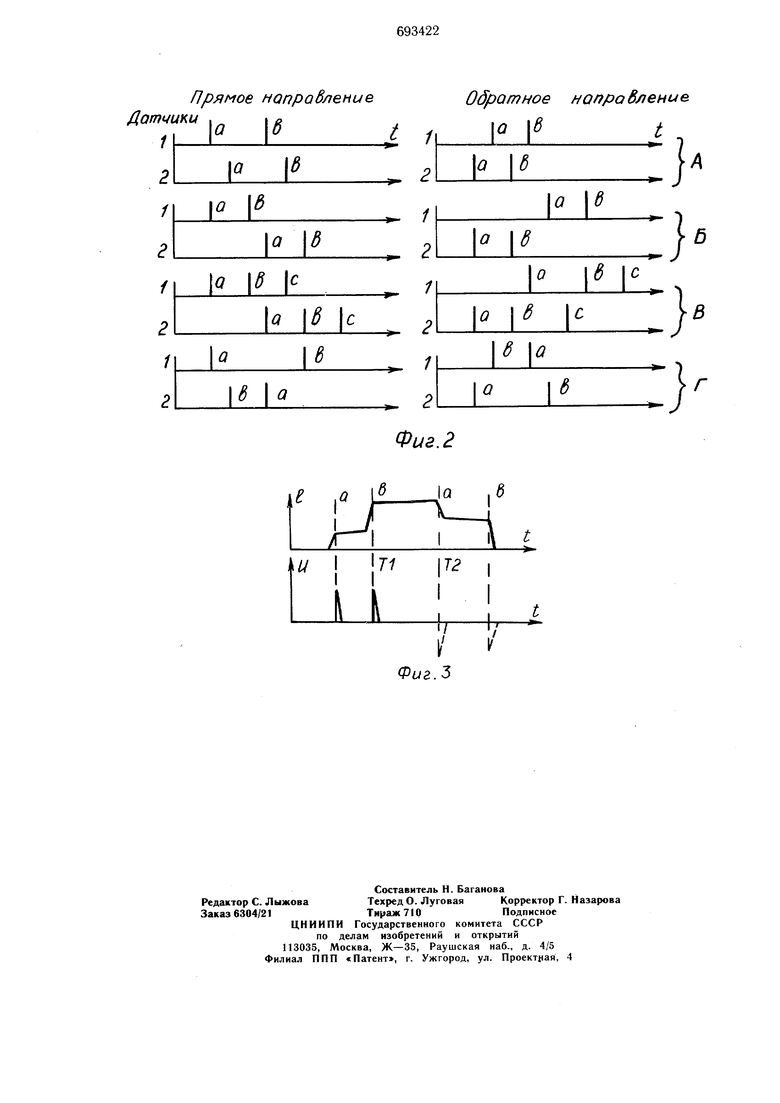
Это достигается тем, что в устройство введены два элемента И, а каждый анализатор направлений содержит триггеры и четыре элемента И, один из входов первого и третьего из которых подключен .к соответствующим датчикам, а входы второго и четвертогоэлементов И каждого анализатора направления объединены между собой соответственно и подключены к выходам элементов ИЛИ соответствующего сумматора направления, выходы первого и второго элементов И каждого анализатора напра ления подключены ко входам первого триггера, выходы которого соединены с другими входами первого и третьего элементов И, один из выходов первого триггера анализаторов направления подключен к соответствующему входу элементов И и, соответственно, к одним из входов первого и второго элементов И сумматора прямого направления, выходы третьего и четвертого элементов И каждого анализатора направления соединенысо входами второго триггера, выходы ко Тбретб подключены к другому входу третьего элемента И своего анализатора направления, к соответствующий входам второго элемента И и, соответствёнйо, ко входам первого и второго элементов И сумматора обратного направления, выходы триггеров каждого сумматора соединены с другими входами соответствующих элементов, а выходы элементов И пойклйчены к одним из входов третьего и четвертого элементов И соответствуюШих су Гматоров направления. На фиг. 1 представлена блок-схема устройства; на фиг. 2 - временная диаграмма возможных вариантов чередования сигналов от датчиков, где А, Б, В, Г - барианты чередования сигналов от датчиков; а, в, с - импульсы, соответствующие объектам; на фиг. 3 - временная зависимость перемещения воспринимающего элемента датчика и выходные импульсы на его выходе для объектов айв, когда они одновременно находятся на одном датчике, например, в течение времени Т1-Т2. Устройство содержит идентичные датчики 1 и 2, которые могут быть выполнены в виде катушки индуктивности в перемещающимся магнитным сердечником, связанным с воспринимающим элементом и формирователем импульсов, счетчики 3 и 4 прямого, и обратного направления, анализаторы направления 5 и 6, сумматоры 7 и 8, элементы И 9 и 1,0. Анализаторы 5, 6 состоят из триггеров 11 и 12, первые и вторые выходы которых через первый 13, второй 14, третий 15 четвертый 16 элементы И соединены со входами соответствующих триггеров 11 и 12, а второй выход триггера 11 дополнительно соединен со входом схемы И 15. Вторые входы схем И 13, 15 подключены к датчику 1 для анализатора 5 и к датчику 2 д/1я анализатора 6. Сумматор 7 состоит из элементов И 17, :48, 19, 20 триггеров 21, 22, элемента ИЛИ 23. Причем первый вход триггера 21 через элемент И 17 соединен с первым выходом триггера 22. Первый вход триггера 22 через элемент И 18 соединен с первым выходом триггера 21. А вторые выходы триггеров 21, 22 через соответствующие элементы И 19, 20 ббёдйнены со входами счетчиков прямого 3 и обратного 4 направления, а также через элемент ИЛИ 23 соединены со вторыми входами триггеров 21, 22 и со входами элементов И 14 анализаторов 5 и 6. Сумматор 8 состоит из элементов И 24-27, триггеров 28, 29, элемента ИЛИ 30, которые между собой соединены, как в сумматоре 7, и аналогично подключены К соответствующим счетчикам 3, 4. Элемент ИЛИ 30 подключен ко входу элемента И 16 анализаторов 5, 6, Вторые входы элементов И 19, 20 через элемент И 9 соединены с выходом триггера 11 и со входом элемента И 17. Вторые входы элементов И 26, 27 через элемент И 10 соединены с выходом триггера 12 и со входом элемента И 25. Датчик формирует и выделяет импульсы только в те моменты, когда объект поступает на воспринимающий его элемент. В этот момент сердечник перемещается в катущке и наводит в ней сигнал в виде остроконечного импульса (см. фиг. 3). При сходе объекга с воспринимающего элемента датчика сердечник возвращается в исходное состояние вместе с воспринимающим элементом и наводит в катущке импульс обратной полярности, который ограничивается формирователем импульса. При поступлении на датчик второго объекта, когда на нем находится уже один объект, воспринимающий элемент дополнительно переместится, что сформирует на выходе датчика второй импульс. В исходном состоянии в анализаторах 5 и 6 триггеры 11, 12 находятся в нулевом состоянии. При этом элементы И 13, 15 подготовлены по однрму из своих входов разрешающим потенциалом соответствующих триггеров 11, 12. Элемент И 14 и по второму входу элемент И 15 заперты запрещающим потенциалом соответствующих триггеров 11, 12. Одновременно заперты запрещающим потенциалом по одному из входов элементы И 9, 17 от триггера 11 анализатора 5, элемент И 9 по второму входу и элемент И 18 заперты от триггера 11 анализатора 6. Аналогично заперты запрещающим потенциалом по одному входу элементы И 10, 24 от триггера 12 анализатора 5, а также элемент И 10 по второму входу и элемент И 25 от триггера 12 анализатора 6. В сумматорах 7, 8 триггеры 21, 22, 28 и 29 находятся в состоянии, при котором элементы И 17, 18, 24, 25 по второму входу подготовлены разрешающим потенциалом этих триггеров. Работа устройства при различных вариантах чередования сигналов от датчиков осуществляется в зависимости от направления следования объектов и количества объектов, одновременно находящихся на воспринимающем элементе датчика. А. Пусть рбъект а движется в прямом направлении и при этом наступает поочередно на датчик 1, затем на датчик 2. При этом на выходе каждого датчика 1 и 2 формируется по одному импульсу. Импульс с выхода датчика 1 через элемент И 13 анализатора 5 установит триггер 11 в единичное состояние. При этом элемент И 13 закроется, а элементы И 9, 14, 15 подготовятся. От переднего фронта потенциала триггера 11 через элемент И 17-триггер 21 сумматора 7 установится в единичное положение и запрет элемент И 18, а элемент И 19 подготовит. Импульс от датчика 2 через элемент И 13 установит триггер 11 анализатора 6 в единичное положение и подго товит элементы И 14, 15, а потенциал с выхода этого триггера не пройдет через элемент И 18. Потенциал с выхода элемента И 9 откроет элемент И 19 сумматора 7. С выхода элемента И 19 сигнал поступит в счетчик прямого направления 3, а также через элемент ИЛИ 23 поступит на вход сброса триггеров 21, 22и через элемент И 14 поступит на вход триггеров И., При поступлении на воспринимающие элементы датчиков 1, 2 объекта в описанный процесс повторится. При обратном направлении движения объектов вначале выдается импульс с выхода датчика 2, затем 1. При этом вначале выдается сигнал с выхода триггера 11 анализатора 6, который в сумматоре 7 опрокинет через элемент И 18 триггер 22 и подготовит элемент И 20. Затем сигнал от датчика 1 опрокинет триггер 11 анализатора 5 и даст разрешение через элемент И 9 на элемент И 20, с которого сигнал поступает на счетчик обратного направления 4 и через элемент ИЛИ 23 - на вход сброса триггеров 11, 21, 22. Если за объектом а nodTyпит объект 8, описанная работа повторится. Вариант Б. В этом случае при движении в прямом направлении двух объектов а и в вначале они наступают поочередно на датчик 1 и находятся на воспринимающем элементе датчика некоторое время вместе (см. фиг. 3), а затем наступают аналогичным образом на датчик 2. От датчика 1 поступают последовательно два импульса, которые запишутся в анализатор 5 и подготовят сумматоры 7 и 8. Сигналы с выхода триггеров 11,12 анализатора 5 опрокинут через элементы И 17, 24 соответствующие триггеры 21, 28. Затем импульсы поступят от датчика 2 в анализатор 6 и опрокинут триггеры 11, 12.Сигналы с выходов этих триггеров через элементы И 9, 10 поступают на вход соответствующих элементов И 19, 26. При этом с выходов элементов И 19, 26 сигналы поочередно поступают на счетчик 3 и на входы сброса триггеров 21, 22 и элемента И 14 через элемент ИЛИ 23, а также на входы сброса триггеров 28, 29 и элемента И 16. через элемент ИЛИ 30. При обратном направлении движения объектов а И в вначале импульсы от датчика 2 запишутся в анализаторе 6 и подготовят сумматоры 7, 8. Затем сигналы от датчика 1 запишутся в анализаторе 5, с выхода которого сигналы поступят через элементы И 20, 27 на счетчик 4 и через элементы ИЛИ 23, 30 на вход сброса триггеров 11, 12, 22, 29. Вариант В.Объекты а, в, с поочередно проходят датчик 1. При этом, когда наступает на датчик 1 объект в, объект а переходит с датчика 1 на датчик 2. За ним на датчик 2 следуют другие объекты. Вначале с датчика 1 в анализатор 5 запищутся два импульса а и в и с помощью триггеров 21, 28 подготовят элементы И 19, 26. Импульс а с датчика 2 запищется в триггер 11 анализатора 6 и даст разрешение через элемент И 9 на считывание результата с триггера 21 сумматора 7 в счетчик 3. Одновременно произойдет сброс триггеров 11 в анализаторах 5 и 6. Третий импульс с с датчика 1 запишется в триггер 11 анализатора 5, а в триггере 12 этого же анализатора ранее записанная единица от объекта в сохранигся. Поступившие два импульса с датчика 2 от объектов вис повторят работу варианта Б. В результате в счетчик 3 поступят поочередно три импульса. При обратном направлении движения объектов работа устройства повторится аналогично, но только в обратном порядке записью в счетчик 4. Вариант Г. Объект а движется в йрямом направлении, а s - в. обратном. В этом случае они могут одновременно оказаться на воспринимающем элементе одного из датчиков. Это соответствует варианту А, совмещающего прямое и обратное направления. Вначале запищется импульс в анализатор 5 от датчика I, затем в анализатор 6 от датчика 2. В результате импульс сформируется на выходе сумматора 7 и поступит в счетчик 3. Or следующей пары имг1ульсов с датчиков 2 и 1 выдается импульс с выхода сумматора 8 в счетчик 4. Предлагаемое устройство позволяет увеличить разрешающую способность и повысить точность при подсчете и определении направления движения объектов, различать объекты и указывать направление их движения даже в случае, если они одновременно находятся на воспринимающем элементе датчика и движутся в одном или в разных направлениях, применять для нескольких проходов или полос движения объектов один общий датчик с одним общим измерительным устройством. Формула изобретения Устройство для определения направления движения объектов, содержащее датчики, подключенные к анализаторам направления, соединенным с сумматорами прямого и обратного направления, каждый из которых выполнен на триггерах, входы которых подключены к выходу элемента ИЛИ и к выходу первого и второго элементов И, выходы третьего и четвертого элементов И соединены со входами элемента ИЛИ, подключенного к счетчикам, отличающееся тем, что, с целью повышения точности устройства, в него введены два элемента И, а каждый анализатор направлений содержит триггеры и четыре элемента И, один из входов первого и треТьёТбйЗ которых подключен к соответствующим датчикам, а входы второго и четвертого элементов И каждого анализатора направления объединены между собой соответственно и подключены к выходам элементов ИЛИ сШтёётетв ющегб сумматора направления, выходы первого и второго элементов И каждого анализатора направления подключены; ко входам первого триггера, выходы которого соединены с другими входами первого и третьего элементов И, один из выходов первого триггера анализаторов направления подключен к соответствующему входу элементов И и, соответст венно, к одним из входов первого и второго элементов И сумматора прямого направления, выходы третьего и четвертого элементов И каждого анализатора направления соединены со вхоГ
дами второго триггера, выходы которого под ключены к другому входу третьего элемента И своего анализатора направления, к соответствующим входам второго элемента И и, соответственно, ко входам первого и второго элементов И сумматора обратного направления, выходы триггеров каждого сумматора соединены с другими входами соответствующих элементов, а выходы элементов И подключены к одним из входов третьего и четвертого элементов И соответствующих сумматоров направления. Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР -№ 420127, кл. Н 03 К 5/00, 15.10.74.
2.Авторское свидетельство СССР № 504214, кл. G 06 М 3/08, 02.01.75.
Фиг. 1
Прямое нопрабление
/ /77VWKW .,.,
Обратное но про Вление
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2004 |
|
RU2276410C1 |
| Устройство для сопряжения с датчиками | 1991 |
|
SU1800459A1 |
| Устройство для определения динамических характеристик материалов | 1985 |
|
SU1283570A1 |
| Устройство для контроля | 1986 |
|
SU1390617A1 |
| Система управления | 1983 |
|
SU1168896A1 |
| Устройство для контроля системы телемеханики с решающей обратной связью | 1980 |
|
SU943805A1 |
| Устройство для учета количества пассажиров | 1975 |
|
SU504214A1 |
| Анализатор спектра Фурье | 1987 |
|
SU1387010A1 |
| Устройство для контроля и управления процессом турбинного бурения | 1987 |
|
SU1461881A1 |
| Устройство для психофизиологических исследований и оценки профессиональной пригодности операторов | 1990 |
|
SU1778769A1 |
В
