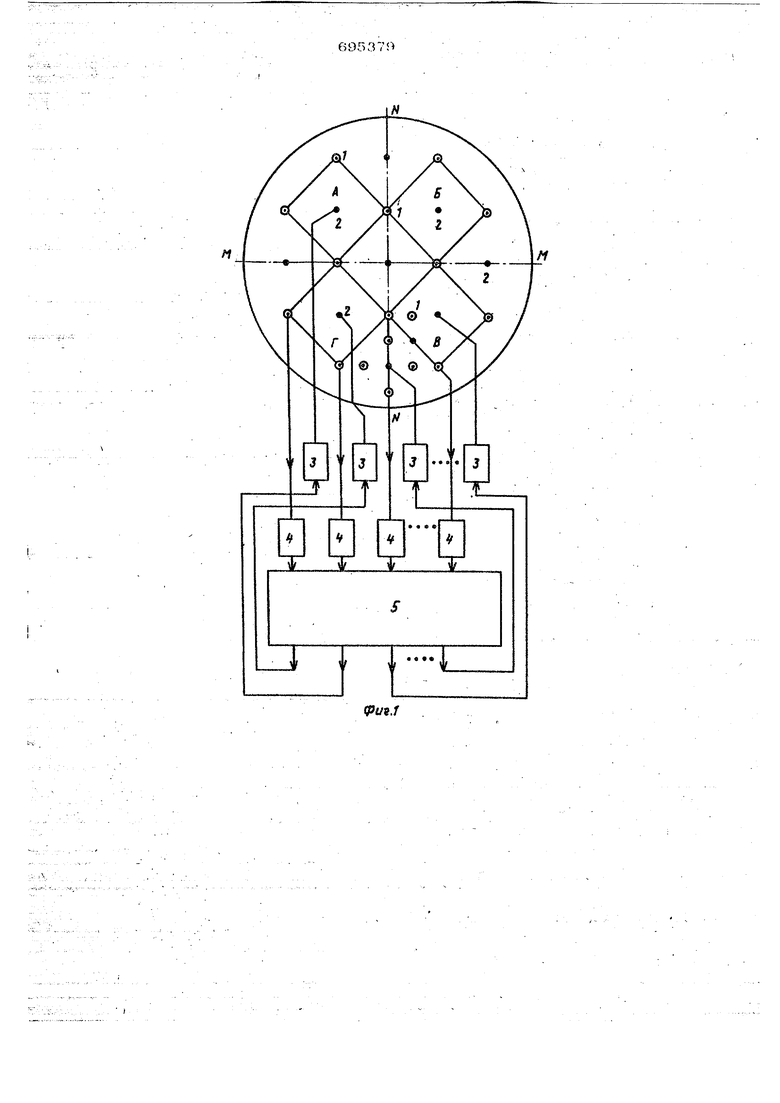
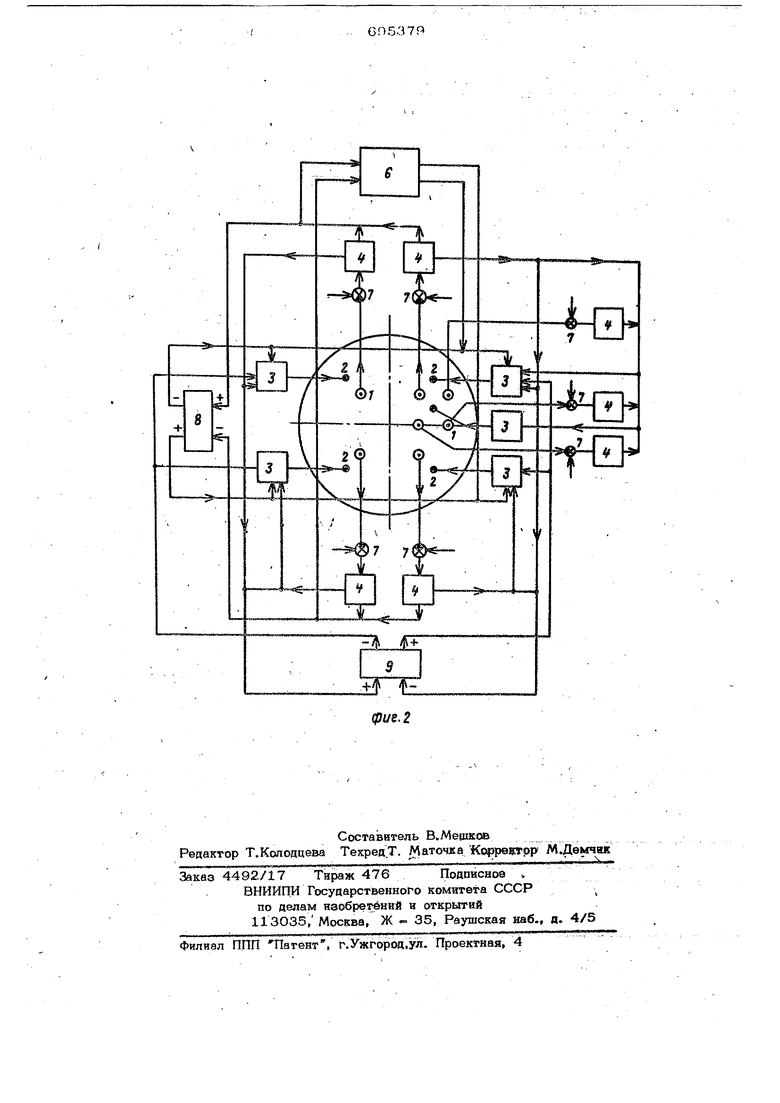
.; --J - . Наиболее близкими к предлагаемым является способ регулирования распределения в яцерном реакторе, заключающийся в oattHakofeb напраёленном и противоположно напр(авденном перемещении регулирующих оргййо JS симметричных относительно диаметральной плоскости половинах активной ШЯЙй йб бйгнапу, пропорциональнс у сумме и разности разбалансов между заданными в фактическими значениями показаний дат«тков, и система регулирования распреде- лёййй энёргбвыделёнйя в ядерном ренакторе содержащая датчики:, за датчики, усилители разбалансов датчиков, подключенные как непосредственно к ближайшим к датчикам регулирующим органу, так и черэа первы сумматор разбалансов спэрвым корректирую щим устройством, и через второй суммато С вторым корректирующим устройством , разнополярными входами и выходами, подйлюЧёййьши соответственно к усилителям разбаланса и регулирующим органам, расположенным в симметричных относительно первой диаметральной плоскости половинах активной зоны з}. Однако этот способ и система регулирования предназначены преимущественно дЛй регулирования распределения энерговыделения по высоте активной зоны. При неустойчивости азимутальной гармоники, наиболее часто встречающейся на практике, плоскость раздела положительных .и отрицательных отклонений энергораспределёния от заданных значений перемещается поэтому способ - прототип, применимый при неподвижной плоскости раздела, приводит к низкой Трчйости и надежности системы регулирования, изобретения - повышение точности и Надежности регулирования энергораспределени а в реакторах, склонных к неустойчивости по фундаментальной и первой азимутальной гармоникам. Это Достигается тем, что противополож Но наг(равленнов перемещение регулирующи органов произвоД5Й относительно двух вза имно перпендикулярных диаметральных плоскостей пЬсиИ1алу, равному разнести суммы разбапансов датчиков, расположенны в Тпёрвом и ётрром i квадрантах, и суммл разбалансов ДАТЧИКОВ расположенных в третьёК и четвертом квадрантах, и сиг« налу, равному разности суммы разбалансов датчиков, расположенных в первом и четвертом квадрантах, и суммы рааба- , -лайсов датчиков, расположенных во вто- ром и третьем квяпрантах, после чего ЙйШйНИт-ельно- ПР10ЙЗВС1ДЯТ и1тцШшур1Ь 69 9-4 перемещения регулирующих органов по сигналам, пропорциональным сумме оставшихся разбалансов с датчиков, ближайших к соответственному регулирующему органу. Кроме того,разбалансы датчиков ограничивают наперед заданной величиной. А в систему регулирования введен тре тч/i сумматор с третьим корректирутдщим устройством, подключенный раанополярными входами и., выходами соответственно к усилителям разбаланса и регулирующим органам, расположенным в половинах активной зоны, симметричных относительно второй диаметральной плоскости, перпен- дйкулярной к первой плоскости. Половины реактора, принадлежащие первому суМмаТЬру, наполовину перекры ваготся Половинами, принадлежащими втоpoMy сумматору. Сигналы с усидителеи разбаланса на вход сумматора и управляющие сигналы на перемещение стержней подаются с весовыми коэффициентами, пропорциональньгми значению соответствующей гармоники в месте расположения да.тчика и стержня. .Введение двух одинаковых регуляторов азимутальной гармоники позволяет сущест- вецно сократить число связей каждого регулирующего органа непосредственно с датчиками, по бравнению с канадской системой регулирования реактора Джентли - 1. Действительно , в этой системе число связей равно М хп ( число датчиков , гп - число стержней) , а по предлагаемому способу число таких связей равно ЗМ {2М связей стержней с двумя регулн-г торами азимутальной гармоники и М связей, обусловленных практически диагональной псевдообратной матрицей). В отличие от системы - прототипа. предлагаемая система позволяет стабилизировать эНергораспретхе тение, неустой чивое по азимутальной гармонике. При этом при отказе одного или нескольких азимутальных или локальных (включенных через псевдообратную матрицу) регуляторов не приводит к выходу из строя всей системы регулирования. Динамическое повепение неустойчивых фундаментальной и первой азимутчльной Гармоник существенно отличается между Собой и относительно высших гармоник, учитываемых статической, псевдообратт ной матрицей. Раздельное рпгулировяпие этих гармоник по предлаг-чемому методу тремя различными регуляторами, связанны ми общими функциональными элементами ( датчики, стержни, усилители) позволяет соответствующим выбором корректиру щих устройств улучшить качество и точност регулирования энергораспределения по сра нению с известными методами и системам На фиг. 1 представлена иллюстрация предлагаемого способа регулирования, реа лизованного на базе управляющей вычисли тельной машины ( УВМ ) , на фиг. 2 структурная схема предлагаемой системы регулирования, также реализующей предлагаемый способ. Активная зона представлена в плане в виде круга , в активной зоне размещены датчики 1 и регулирующие органы 2, например стержни, перемещаемые с помощью сервоприводов 3 . Сигналы датчиков усиливаются , нормируются на усилителях 4 разбалансов датчиков и подаются на . УВМ 5, в которой реализуется способ (ал горитм) регулирования. Вычислительная машина 5 выдает упра ляющий сигнал на перемещение каждого стержня; складьгоающийся из сигналов раз баланса : по интегральнбй мощности, по двум первым азимутальным гармоникам, повернутым одна относительно другой на 90 , по индивидуальному сигналу, вырабатываемому путем перемножения в УВМ псевдообразной матрицы на разбалансы показаний датчиков, также вычисляемые в УВМ. Вследствие того, что псевдообратная матрица вычисляется от матрицы реактора за вычетом вклада в нее футшаментальной и первой азимутальной гармоник, то индивидуальный сигнал вычисляется практически по разбалансам нес кольких датчиков, ближайших к, перейещае. мому Стержню. Активная зона разбита двумя взаимно - перпендикулярными плоскостями ММ и NN дважды на две полови ны : на половины, состоящие из А, Б квад рантов и В, Г квадрантов и на половины, состоящие из А, Г квадрантов и Б,В квадрантов. Для упрощения фиг. 1 на ней показаны не все связи датчиков 1 и стержней 2 с вычислительной машиной 5, Допустим, что в результате разгрузки канала в 1 чет верти мощность ее упала. Тогда),ствржни, перемещаются по упра&тяющему сигналу, явл5иощемуся суммрй следующих снГналой: | сигнала,пропорционального cyMiJie разбалан«сов всех датчиков (сигнал одного знака на все стержни) сигнала, пропорциональ«5 но го разности суммарных разбалансов , меЛду датчиками А, Г квадрантов и суммерных разбаланров Б, Вквадрантов {приводит к извлеченто стержней А,Г,квадрантов и погружению стержней Б и В шаад-. рантов); сигнала, пропорционального разности суммарных разбалансов В,Г квадрантов и суммарных разбалансов А,Б квадрантов (приводит к извлечению стержней А,Б квадрантов и погружению Стержней В,Г квадрантов), индивидуального сигнала, пропорционального произведению псевдообратной матрицы (за вычетом вклада фундаментальной и амплитудной гармоник) на разбалансы датчиков (этот сигнал опре деляется практически по ближайшим к/ перегружаемому каналу датчикам и вызывает пе|эемещение вверх ближайшего стержня к перегружаемому каналу). В описанном примере команду на пере, мещение УВМ дает в основном на стержни А квадранта. Система регулирования (см. фиг. 2) реализует предлагаемый способ без применения ЭВМ. В ней первый сумматор с первым корректирующим устройством 6 о беспечиваетвьфаботку управляющего сигнала одного знака на все стержни по сумме разбалансов со всех усилителей { аз6а« лансов (разбалансы вычисляются на задатчиках 7). Второй сумматор с вторым корректирующим устройством 8 я третий сумматор с третьик корректирующим устройством 9 обеспечивает выработку управляющих сигналов по первой азимутальной гармонике, при этом разнополярные входы и выходы этих устройств подключены соог. ветственно к усилителям разбаланса и регулирующим оргайаМ через сервоприводы, а датчики и регулирующие ,органы расположены В1 симметричных относительно двух диаметрально перпендикулярных плоскостей половинах активной зоны. Пеовый, второй и третий сумматоры содержат корректирующие устройства, настроенные на регулирование интегральной мощности (на выходе первого сумматора) и на регулирование первой ааимутальной гармоники (на выходе второго и третьего сумматора). Таким образом , сумматоры корректирующими устройствами прадсгав 5пот собой электронные регуляторы для ундаментальной и азимутальной гармоник индивнцуальяькм законом рвг улйрова ия для каждо; гармоникн. Аналогично, индивидуальный закон реулирования устанавливается и по контуру ндивидуального управления стержнем, бразованному датчиками 1, ближайшими 769 к стержню, аадагчиками 7, усилителями 4 разбаланса, усилителями мощности с сервопровоаами 3, стержнями 2. Коэфицнент усиления этого контура выбран таким , что этот инаивидуальный (зонный) регулятор является медленнодействующим , т.8. он вступает в действие после быстрого подавления фундаментальной и первой азимутальной гармоник контурами регуляторов с сумматорами. По этой причине элемент псевдообратной матрицы, необходимый для вычисления индивидуального дополнительного сигнала управления на стержень в этой системе пропорционален сумматорному разбалансу датчиков, блистержню. (Таким образом, этой жайших к системе индивидуальные контуры управления стержнями работают как зонные регуляторы, не связанные один с другим ни через объект, ни через элементы регуляторов. Система, представленная на-фиг. 2 , работает аналогично системе, представленной на фиг. 1. Фундаментальная гармоника (интегральная мощность) и первая азимутальная гармоника стабилизируются соответственно сумматорами с корректирую щими устройствами (регуляторами), а поддержание заданной формы распределения тепловыделения обеспечивается в основном контурами зонных регуляторов. Доверительные разбалансы датчиков ограничивают по модулюнаперед заданной величиной, например 5%. Это означает, что разбалансы, равные ±5%, система и алгоритм обрабатывают как достоверные разбалансы, а всем разбалансам , большим , чем 5%(по модулю) присваивают значение, равное Э% с соответствующим знаком, или нуль. В аналоговом регуляторе это обеспечивается соответствую щими зонами пропорциональности и насы- / щения усилителя, а при реализайии на УВМ соответствующими логическими условиями в алгоритме регулирования Введение указанного ограничения на до верительные разбалансы позволяет дополни тельно увеличить надежность и точность регулирования за счет иск/цочения ложной информации от вышецшик из строя Датчико н усилителей |pue6artahfcaj яВляющйХСй наиболее массовыми и ненадежными элементами в Системе., Возможна также отбраковка измеритель ных каналов при обнаружении большого (наперед заданного) отличия их сигналов от сигналов соседних каналов. 9 Разумеется, не все датчики и не все стержни включены оановременно во все четыре контура регулирования. Так например, число зоннык регуляторов может превышать число стержней, включенных одновременно во все контуры регулирования {см. фиг. 1, 2). Возможна реализация способа целиком набааеУВМ фиг.1) аналоговая реалиэацйя системы (фиг. 2) . иепесообразна также реализация наиболее важных с точки зрения надежности регуляторов аналоговыми средствами с соответствующим резервированием, а контуров зонного рагу пирования - на УВМ. Предлагаемый способ реализует также трехмерное регулирование распределения Тепловыделения по активной зоны. В этом случае, полученный по этому способу управляющий сигнал используют для регулирования радиального распределения Мощности по каналам реакторам путем перемещения верхних и нижних стержней оба - в активную зону при одной полярности управляющего сигнала и оба - из активной зоны - при другой полярности сигнала. Зонное регулирование распределения тепловыделения по (длине канала) при этом осуществляют, как и в системе - прототипе, по разности сигналов верхних датчиков и нижних, путем извлечения из активной зоны нижних стержней и погружения верхних или наоборот , в зависимости от полярности разностного сигнала. Для больших каналов реакторов предлагаемый способ целесообразно реализовать путем включения 5-12 стержней в контуры регулирования интегральной мощности и первой азил4утальной 1гармоники. Остав- ; шиеся стержни должны быть включены только в индивидуальные контуры зонного , регулирования. Технический эффект от , применения предлагаемых способа и системы регулирования состоит в повышении надежности и точности регулирования. В отличие от системы - прототипа предлагаемая система обеспечивает стабилизацию распределения тепловыделения с неустойчивой первой азимутальной гармоникой. Формула изобретения 1. Способ регулирования распределения энерговыделения в ядерном реакторе.
заключающийся в одинаково направленном н противоположно направленном перемещении регулирующих органов в симметрия- ных относигельно аиаметральной плоскосгк половинах активной зоны по Сигналу, про 5 порцион ал ьному сумме а разности раз-
балансов межау заданйыми w фактическн ми значениями показаний датчиков, о т личающийся тем, что, с целью повышения точности и надежности регу- 0 лирования энергораспределения в реакто рак, склонных к неустойчивости по фундаментальной и первой азимутальной гарМоникам, противоположно направленное перемещение регулирующих органов про- 15 изводят относительно двух взаимно перпендикулярных диаметральных плоскостей по сигналу, равному разности суммы разбалансов датчиков, расположенных в первом и втором квадрантах, и суммы .20 разбалансов датчиков, расположенных в третьем и четвертом квадрантах , и сигналу, равному разности суммы пазба ансов датчиков, расположенных в первом и четвертом квадрантах и суммы раз- 25 балансов датчиков, расположенных во тором и третьем квадрантах , после чего дополнительно производят индивидуальные перемещения регулирующих органов по сигналам пропорцоональным зо умме оставшихся, разбалансов с датиков, ближайших к соответствующему органу.
З.Способпоп. liотличающийся тем, что разбалансы датчиков ограничивают Ha-jj перед заданной величиной.
З.Система регулирования распределения энерговыделения в aaepiitoM реакторе по способу по па.1 н 2, соаержаоЬя датчики задатчики, усилители разбалансов датчйков, подключенные как непосредственно s ближайшим к датчикам регулирующим органам , так н через первый сумматор разбалансов с первым корректирующим устройством, и через второй сумматор с вторым корректирующим устройством , разнополярнымв входами и выходами , подключенными соответственно к усилителям разбаланса а регулирующим органам, расположенным в симметричных относе Тельно первой аиак{етральной плоскости половинах активной зш1Ы, отличающаяся тем, что в систему введен третий сумматор с третьим корректирующим устройством, подключенный разнопо лгрными входами н выходами соответственно к усилителям разбаланса и регулирута щим органам, расположенным в поповгнак активной зоны, симметричных относительн .второй диаметральной юноскостн, парпенцикуларной к первой шюскостн.
.
Источники информации, .принятые во внимайве при sKcnepiTHas 1, Авторское свидетельство СССР
N«497883, кл. а 21 С 7/36, 17.05.74
2 Стабилизация полей гнзрг выдепгкия в реакторе АЭС Джевтлй.Ато шаа техника за рубежом, hfeS, 1973, с, .
3. Авторское свидетельство СССР по заявке №2363742/18-25, кл. Q 21 С 7/36, 25.05.76 (поототапК
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической стабилизации энергораспределения ядерного реактора | 1978 |
|
SU701360A1 |
| Система автоматического регулирования мощности ядерного реактора | 1974 |
|
SU497883A1 |
| Аналоговая модель ядерного реактора | 1978 |
|
SU711879A1 |
| Устройство для управления процессом каталитического алкилирования | 1979 |
|
SU905799A1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРОВОГО КОЭФФИЦИЕНТА РЕАКТИВНОСТИ ЯДЕРНОГО ЭНЕРГЕТИЧЕСКОГО РЕАКТОРА ТИПА РБМК | 2004 |
|
RU2280908C1 |
| Устройство для регулирования температуры | 1980 |
|
SU877491A1 |
| Устройство для управления ядерным реактором | 1974 |
|
SU558655A3 |
| Система регулирования пространственной неустойчивости энерговыделения ядерного реактора | 1990 |
|
SU1823010A1 |
| Система регулирования процесса горения в котлоагрегате | 1989 |
|
SU1721396A1 |