В ряде промышленных сооружений, как, например в шлюзах, цистернах, водонапорных установках, а также на судах и в доках, широкое применение находит дистанционный контроль уровня жидкости и сигнализация ее появления.
Для решения этой задачи предлагались многочисленные электрические и неэлектрические способы, наибольшее распространение из которых получили способы, основанные на применении поплавков различного типа, воздушных колоколов, а также основанные на изменении параметров электрической цепи (сопротивления и емкости) при погружении ее в жидкость.
Однако на судах использование обычных поплавковых устройств в значительной степени ограничивается тем обстоятельством, что отсеки, в которых производится измерение, как правило, загромождены оборудованием, боеприпасами и другими предметами. Кроме того, большинство отсеков имеет криволинейную форму, исключающую использование рычажных поплавков и поплавков с прямолинейными направляющими. Поэтому в большинстве корабельных отсеков поплавковые приборы получили распространение лишь как индикаторы появления воды.
Приборы, основанные на принципе действия воздушного колокола, имеют значительно меньшие габариты, чем поплавковые, но в свою очередь обладают рядом существенных недостатков, к числу которых относятся:
1) зависимость показаний прибора от давления атмосферы, вследствие чего в отдельных случаях прибор может показывать наличие воды даже при отсутствии ее в отсеке;
2) незначительная начальная сила, сдвигающая сильфон при малых давлениях, вследствие чего трение в осях резко снижает чувствительность прибора при небольших уровнях воды и повышает погрешность измерений.
Предметом настоящего изобретения является прибор для дистанционного измерения высоты уровня жидкости при помощи диференциального индукционного датчика, включенного по схеме моста переменного тока.
С целью раздельной фиксации момента появления воды в приборе и изменения ее уровня в заданных пределах для привода якоря совместно применены поплавок и мембрана (или сильфон). Мембрана располагается в верхней части воздушного колокола, образуемого кожухом прибора и вмещающего поплавок, с тем, чтобы первоначальное смещение якоря происходило под действием поплавка, а по достижении водой определенного уровня - под действием смещения мембраны в результате сжатия заключенного в колоколе воздуха.
Другая отличительная особенность изобретения заключается в применении вспомогательного электромагнита, включенного последовательно в цепь питания моста и воздействующего на отдельный якорь, укрепленный на оси датчика. Этот якорь служит для создания дополнительного противодействующего момента при начальных перемещениях подвижной системы датчика.
Одновременное применение поплавка, воздушного колокола и электромагнита, притягивающего якорь, исключает указанные выше недостатки по следующим причинам:
1) для сдвигания оси нужна значительная начальная сила, преодолевающая силу притяжения электромагнита; эта сила, создаваемая поплавком, возникает только при появлении воды в отсеке, следовательно, колебание барометрического давления не может вызвать сигнал появления воды в отсеке;
б) сила притяжения якоря к электромагниту обеспечивает возвращение оси в исходное положение;
в) отсутствие в датчике направляющих скользящего типа исключает возможность затирания оси; при этом пружинная подвеска оси в двух точках гарантирует правильное положение оси при качке корабля.
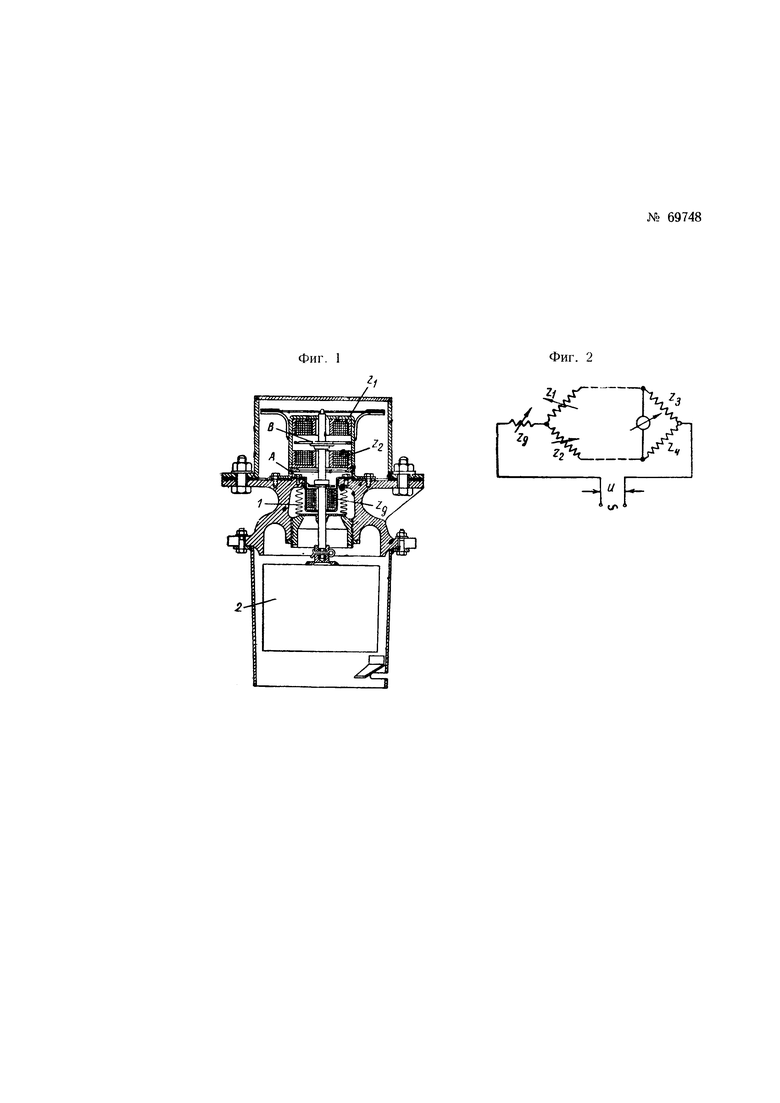
На фиг. 1 изображен датчик прибора, на фиг. 2 - электрическая схема включения.
Механическая часть датчика, изображенного на фиг. 1, состоит из прямолинейного перемещающегося или поворотного поплавка 2, жестко связанного с мембраной 1. Последняя расположена в воздушном колоколе и может быть конструктивно оформлена как в виде упругой пластины из металла, резины или какого-либо другого материала, так и в виде металлической гофрированной коробки (сильфона).
В центре мембраны прикреплена вертикальная ось, несущая на себе два якоря А и В, выполненные в виде пластин. Второй конец оси подвешен к упругой пластине или к цилиндрической пружине таким образом, что в самом нижнем положении ось имеет некоторый свободный ход (порядка 10-15% от общего хода оси) при подъеме поплавка. Нижний якорь при начальном положении оси, соответствующем сухому отсеку, прижат к сердечнику нижней катушки Zg, а верхний якорь при этом находится приблизительно посредине воздушного зазора между двумя катушками Z1 и Z2. Такое положение оси обеспечивается благодаря электромагнитному притяжению якоря к нижней катушке и упругости мембраны, находящейся в начальных условиях в состоянии некоторого механического напряжения и стремящейся передвинуть ось вниз. Кроме того, сила тяжести подвижной части системы (оси, якорей, поплавка) также создает усилие, прижимающее якорь к нижней катушке.
Катушки включены по электрической схеме, изображенной на фиг. 2. Две верхние катушки Z1 и Z2 образуют плечи индуктивного моста, а нижняя Zg включена последовательно с мостом.
При появлении воды в отсеке подъемная сила поплавка будет стремиться передвинуть ось вверх. В том случае, когда эта подъемная сила окажется больше суммы противодействующих сил, якорь вместе с осью передвинется вверх, электромагнитное притяжение нижнего якоря начнет быстро уменьшаться. Так как упругость мембраны выбирается наибольшей по сравнению с подъемной силой поплавка, то ось якоря, перемещаясь вверх, прижмется к верхней пружине.
Движение оси продолжается до тех пор, пока не наступит равновесие сил, что получится при относительно небольшом прогибе пружины. Процесс перемещения якоря, происходящий только под действием подъемной силы поплавка, соответствует сигнальной зоне прибора.
Вплоть до того, пока вода не закроет нижнюю часть воздушного колокола, никакого дальнейшего передвижения оси происходить не будет, так как подъемная сила поплавка, находящегося в конечной части зоны сигнализации полностью в воде, при дальнейшем повышении уровня воды не изменится. Во избежание колебаний подвижной системы при движении оси с поплавком, очертание последнего делается таким, чтобы его сопротивление движению в воде было большим. При дальнейшем подъеме уровня воды на мембрану начнет действовать давление воздуха воздушного колокола, стремящееся передвинуть ось якорей вверх. Перемещение якоря при этом будет зависеть, главным образом, от упругости пружины и давления воздуха на мембрану. При полном затоплении отсека ось займет наивысшее положение.
Вследствие перемещения якорей происходит изменение активного и реактивного сопротивлений всех трех катушек, так как экспериментально и теоретически доказано, что угол сдвига фаз между током и напряжением в катушке, поток которой замыкается по схеме, подобной рассматриваемой здесь, почти не зависит от положения якоря.
По мере подъема якоря сопротивления Z2 в сигнальной зоне резко уменьшается, сопротивление Z1 возрастает, а сопротивление Zg падает.
Известно, что суммарное приращение сопротивлений Z1 и Z2 растет по мере удаления якоря от нейтрального (среднего) положения.
Таким образом в результате смещения якорей в сигнальной зоне произойдут следующие изменения:
а) повышение напряжения на мостике вследствие уменьшения сопротивления; б) увеличение тока в нулевой диагонали моста за счет изменения сопротивлений Z1 и Z2.
Все это приводит к значительному повышению чувствительности моста в конце сигнальной зоны. Измерительная зона начинается с момента возникновения давления воздуха на мембрану. При этом ток нулевой диагонали моста растет по мере перемещения верхнего якоря, что дает возможность отградуировать прибор, включенный в нулевую диагональ моста, соответственно высоте уровня столба воды.
В датчике размещаются только левые плечи моста; правые же Z3-Z4 вместе с измерительным прибором нулевой диагонали монтируются на щите, находящемся на контрольном посту. Это исключает возможность короткого замыкания линии питания моста и уменьшает число проводов.
Верхняя катушка Z1 датчика имеет количество витков на 3-5% больше, чем нижняя. Поэтому при нейтральном положении якоря в нулевой диагонали моста протекает некоторый ток, смещающий стрелку прибора из его нулевого положения. Тот же эффект может быть достигнут предварительным смещением верхнего якоря из нейтрали. При обрыве питания прибора стрелка отклоняется влево (на механический нуль); при обрыве или коротком замыкании одного из плеч моста стрелка отклоняется вправо за рабочую часть шкалы. Поэтому шкала прибора имеет следующие зоны: а) обрыв, б) сигнальная зона, в) измерительная зона и г) авария. Это дает возможность производить автоматический контроль исправности схемы.
При надлежащем подборе параметров можно изменять шкалу в сторону повышения чувствительности в конце шкалы, т.е. по мере роста уровня воды. Последнее представляет интерес в тех случаях, когда контролируемый отсек имеет сечение, растущее с высотой. Такие отсеки довольно часто встречаются на кораблях. Так например, к числу их принадлежит большинство бортовых отсеков корабля. Благодаря повышенной чувствительности в средней и конечной частях шкалы чувствительность, отнесенная к единице объема (веса) принятой в отсек жидкости, является более или менее постоянной, что позволяет с большей точностью определять кренящий момент, вызываемый отсеком. Изменение чувствительности может регулироваться с помощью шунта, включаемого параллельно катушке электромагнита.
Влияние посторонних факторов на работу прибора характеризуется следующим образом.
Колебание температуры в отсеке не вызывает изменения показания прибора, так как омическое сопротивление катушек составляет относительно малую величину от их полного сопротивления, и, кроме того, изменение сопротивлений при нагреве и охлаждении происходит одновременно у двух катушек моста.
Влияние колебаний частоты тока сети в ограниченных пределах на показание прибора в нулевой диагонали ничтожно.
Влияние колебания величины напряжения сети по данной схеме значительно ослабляется, так как при отсутствии воды в отсеке угол отклонения стрелки невелик и, кроме того, при повышении напряжения сети увеличится падение напряжения в добавочном сопротивлении Zg. В измерительной зоне влияние колебания напряжения сети значительно.
Влияние изменения внешнего давления в ограниченных пределах в отсеке нейтрализуется тем обстоятельством, что в сухом отсеке для продвижения якоря необходимо преодолеть силу его притяжения к катушке, которая относительно велика.
Уменьшение влияния вибраций для сухого отсека достигается снижением веса подвижной системы по отношению к электромагнитной силе притяжения якоря. Так как частоты корабельных вибраций невелики, то достичь условия неподвижности якоря при вибрации возможно. Для затопленного отсека влияние вибрации заметно снижается благодаря трению поплавка в воде.
В сухом отсеке благодаря притяжению якоря к нижней катушке качка не вызывает колебания подвижных частей прибора. При затоплении отсека колебания якоря ограничены верхней пружиной и мембраной, имеющими значительную жесткость в поперечном направлении. С целью уменьшения влияния потоков воды на поплавок последний окружается трубой с прорезами. Эта труба воспринимает на себя гидравлические удары перемещающейся в отсеке воды.
Короткое замыкание любого из проводов между датчиком и приемником на корпус сигнализируется резким изменением положения стрелки прибора. Одновременное короткое замыкание двух проводов, питающих систему, исключено. Уменьшение сопротивления изоляции между проводами, идущими от плеч Z1 и Z2 к плечам Z3 и Z4, до 10-кратного значения по отношению к сопротивлению нулевой диагонали, также не окажет заметного влияния на показание прибора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ВЫСОТЫ УРОВНЯ ЖИДКОСТИ | 1947 |
|
SU74388A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ (ИЗМЕРЕНИЯ) ПЛОТНОСТИ ЖИДКОЙ СРЕДЫ И ПЛОТНОМЕР ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2270435C2 |
| Устройство для приготовления электро-лиТА | 1978 |
|
SU843034A1 |
| Устройство для передачи на расстояние показаний измерительных приборов | 1947 |
|
SU74661A1 |
| Способ определения плотности жидкости (варианты) и устройство для его осуществления (варианты) | 2019 |
|
RU2710082C1 |
| Поплавковый плотномер | 1989 |
|
SU1696967A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| ДАТЧИК УРОВНЯ ЖИДКОСТИ | 1973 |
|
SU370473A1 |
| САМОТРАНСПОРТИРУЮЩАЯСЯ МИНА-ГЛАЙДЕР И СПОСОБ ЕЕ ПОСТАНОВКИ | 2016 |
|
RU2668021C2 |
| Устройство для измерения расхода жидких и газообразных сред | 1989 |
|
SU1620844A1 |
1. Прибор для дистанционного измерения высоты уровня жидкости при помощи диференциального индукционного датчика, включенного по схеме моста переменного тока, отличающийся тем, что с целью раздельной фиксации момента появления воды в приборе и изменения ее уровня в заданных пределах для привода якоря совместно применены поплавок и мембрана (или сильфон), расположенная в верхней части воздушного колокола, образуемого кожухом прибора и вмещающего поплавок, с тем, чтобы первоначальное смещение якоря происходило под действием поплавка, а по достижении водой определенного уровня - под действием смещения мембраны в результате сжатия заключенного в колоколе воздуха.
2. В устройстве по п. 1 применение вспомогательного электромагнита, включенного последовательно в цепь питания моста и воздействующего на отдельный якорь, укрепленный на оси датчика и служащий для создания дополнительного противодействующего момента при начальных перемещениях подвижной системы датчика.
