1. Способ измерения параметров движения железнодорожного подвижного состава" относится к способам измерения параметров поступательного движения железнодорожных подвижных составов, перемещающихся по реально существующим рельефам поверхностей.
Источники информации
1. Локомативная аппаратура системы автоматического управления торможением поездов САУТ-ЦМ/485. Датчик поворота универсальный ДПС-У. Руководство по эксплуатации ПЮЯИ. 468179.001 РЭ. Инструкция по поверке ПЮЯИ. 468179/001 ИЗ. Альбом №3. Всего альбомов 9. ООО НПО САУТ (620027, Екатеринбург, Челюскинцев 15, оф 20, е-mail saut@saut.ru, saut@nextcom.ru www.saut.ru
2. Гилмор и Фельдман'Тироскоп с обратной связью по моменту для бескарданных систем", "Вопросы ракетной техники (ВРТ)" №9, 1970 г.
3. Гелб и Сутерленд "Способы уменьшения ошибок бескарданных систем, вызванных погрешностями гиротахометров", "ВРТ" №6, 1969 г.
3.1. Никитин Е.А., Балашова А.А. Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров, Москва, "Машиностроение", 1969 г. (стр.142, прототип).
3.2. Андейченко К.Н. Динамика поплавковых гироскопов и акселерометров. Москва, "Машиностроение", 1987 г. (прототип).
4. Горбачев А.Л., Красовский А.Я., Николаев А.В., Смирнов А.Н., Соколов В.В. Проектирование и надежность систем автоматики и телемеханики. Минск, "Высшая школа", 1981 г.
5. Авторское свидетельство №395717, G 01 с 19/00 "Способ контроля работоспособности гироприбора" (прототип).
6. У.Ригли, У.Холлистер, У.Денхард, Теория, проектирование и испытания гироскопов. Перевод с английского. Под редакцией С.А.Харламова, Москва, "Мир", 1972 г. (Глава 15, стр.353-400) (выявленный дополнительно аналог).
Известен "Способ измерения параметров движения железнодорожного подвижного состава /1/, стр.3, включает установку датчика угла поворота на буксах колесных пар подвижного состава, при перемещении основания преобразуют угол поворота оси колесной пары в пропорциональное количество импульсов, используемых в измерительных системах, контролирующих направление движения, пройденный путь, скорость и ускорение подвижного состава железнодорожного транспорта при скорости вращения оси диска не более 2122 с об/мин. Преобразуют угол поворота оси колесной пары в пропорциональное количество импульсов так, что формируют в датчике два идентичных канала, сигналы каждого канала сдвигают между собой на угол, соответствующий по времени четверти периода следования импульсов, по периоду следования которых определяют скорость вращения колесной пары, при этом формируют два канала для определения направления движения локомотива.
Преобразуют угол поворота в количество импульсов в результате модуляции оптического потока, излучаемого светодиодом.
Диск-модулятор вращают синхронно с колесной парой. Фототранзистор, находящийся на одной оси со светодиодом, преобразует оптический поток в электрический сигнал.
Недостаток прототипа - измерение скорости движения подвижного состава посредством измерения скорости вращения колесных пар. Способ предполагает вращение диска-модулятора синхронно с колесной парой при этом при резких торможениях и разгонах за счет проскальзывания колес вносится погрешность в измерение параметров углового движения. Кроме того, наличие вращающихся частей (и подшипников) предполагает ограниченный срок службы прибора и наличие необходимости частого проведения регламентных работ.
Задача технического решения - повышение точности измерения параметров углового движения подвижного состава за счет применения для этих целей поплавкового маятникового акселерометра и дискретным выходом и контуром коррекции сигнала акселерометра, обусловленного перемещением состава по наклонной плоскости. Поставленная задача решается так, что способ измерения параметров движения железнодорожного подвижного состава, включающий установку поплавкового маятникового акселерометра на подвижное основание, имеет особенность такую, что при этом совмещают ось чувствительности акселерометра с направлением его движения, а выходную устанавливают вертикально, формируют поплавковый подвес чувствительного элемента гидростатического типа, используют при этом нулевую плавучесть чувствительного элемента, формируют контур обратной связи акселерометра - "электрическую пружину" таким образом, что замыкают сигнал датчика угла через усилитель обратной связи на датчик момента, при движении основания с ускорением Wx вдоль оси чувствительности отклоняют поплавок пропорционально ускорению, формируют сигнал усилителя обратной связи в виде тока в обмотке датчика момента, пропорционального ускорению Wx, интегрируют сигнал усилителя обратной связи и формируют при этом дискретный выходной сигнал в виде выходных информационных импульсов, пропорциональный скорости Vx подвижного состава, интегрируют этот дискретный выходной сигнал и получают сигнал о величине перемещения Х подвижного состава, корректируют выходной сигнал акселерометра при перемещении состава по наклонной плоскости (на спусках и подъемах), судят о величине ускорения Wx по величине тока в датчике момента, о величине и изменении скорости движения основания Vx по изменению числа N выходных информационных импульсов с дискретного выхода акселерометра, а о величине перемещения основания Х по величине сигнала на выходе интегратора дискретного выходного сигнала акселерометра, пропорционального произведению скорости Vx и времени t движения основания.
Интегрируют сигнал усилителя обратной связи и формируют при этом дискретный выходной сигнал в виде выходных информационных импульсов, так что устанавливают в цепь датчика момента интегрирующую емкость, а при действии ускорения Wx на чувствительный элемент пропускают ток в датчике момента, и формируют при этом изменяющуюся разность потенциалов на обкладках интегрирующей емкости, по мере накопления заряда на емкости периодически разряжают ее посредством импульсов тока определенной длительности и амплитуды, формируемых преобразователем ток - число импульсов, получают при этом дискретный выходной сигнал в виде импульсов.
Корректируют выходной сигнал акселерометра при перемещении состава по наклонной плоскости (на спусках и подъемах) так, что при движении состава на подъемах суммируют сигнал "электрической пружины" и корректирующий выходной сигнал, а при движении состава на спусках алгебраически суммируют сигнал "электрической пружины" и корректирующий выходной сигнал, при этом формируют корректирующий сигнал пропорционально g sinα и подают его на одну из обмоток датчика момента, угол α наклона плоскости движения состава к плоскости горизонта определяют при помощи наклономера, построенного на базе жидкостного маятникового переключателя с увеличенной зоной линейного участка зависимости его выходного сигнала от угла α наклона плоскости движения подвижного состава к плоскости горизонта. Задача также решается так, что способ измерения параметров движения железнодорожного подвижного состава, включающий установку прибора на подвижное основание, имеет особенность такую, что при этом совмещают ось чувствительности акселерометра с направлением его движения, а выходную ось вертикально, формируют поплавковый подвес чувствительного элемента гидростатического типа, используют при этом нулевую плавучесть чувствительного элемента, имеет особенность такую, что интегрируют сигнал усилителя обратной связи и формируют при этом дискретный выходной сигнал в виде выходных информационных импульсов, так что формируют положительный и отрицательный уровень формирования тока в обмотке управления датчика момента и тем самым формируют некоторую зону нечувствительности акселерометра угловых движений поплавка, отклоняют поплавок относительно основания под действием входного ускорения Wx до момента, когда величина сигнала с выхода датчика угла превысит один из уровней формирования тока в обмотке управления датчика момента, формируют в датчике момента ток определенной амплитуды с момента совпадения увеличивающегося сигнала с датчика угла с одним из уровней формирования тока в обмотке датчика момента (т.е. нахождение поплавка за границей зоны нечувствительности) и до момента, когда уменьшающийся сигнал с выхода датчика угла уменьшится до сформированного уровня пропускания тока в обмотке управления датчика момента (т.е. при нахождении поплавка между границами зоны не чувствительности), измеряют время нахождения поплавка за границей зоны нечувствительности так, что стробируют ("заполняют") интервал времени нахождения поплавка за границей зоны не чувствительности информационными импульсами, и тем самым формируют дискретный выходной сигнал акселерометра в виде этих информационных импульсов.
Новизна. Впервые предложено определять скорость движения подвижного состава посредством высокоточного поплавкового маятникового акселерометра с дискретным выходом и схемой коррекции выходного сигнала при движении подвижного состава по наклонной плоскости (на спусках и подъемах). При этом предложены варианты исполнения контура "электрической пружины" с преобразователем "ток - цифровой код" с интегрирующей емкостью или реллейно импульсным контуром обратной связи типа /2/ с особенностями.
Обоснование технического решения. Конструкция поплавкового маятникового акселерометра (ПМА) известна /3.1, 3.2, 6/. Однако анализ применения ПМА для определения параметров поступательного движения железнодорожного подвижного состава выявил специфическую методическую погрешность, проявляющуюся при движении состава по наклонной плоскости. Суть формирования погрешности ПМА состоит в том, что кроме формирования так называемой "скатывающей силы", изменяющей скорость перемещения подвижного состава это же приращение ΔWx=g sinα ускорения Wx, действует и на маятниковость ПМА, как внешнее измеряемое ускорение Wx. Поэтому предложено оценивать угол наклона плоскости перемещения подвижного состава к плоскости горизонта и вводить поправку (корректирующий сигнал) в контур "электрической пружины". Формировать поправку предложено простейшим способом. Для этого предложено осуществлять измерение угла наклона плоскости движения к плоскости горизонта и формирование сигнала, пропорционального ΔWx=g sinα, который и алгебраически суммируют с сигналом о величине продольного ускорения Wx перемещения подвижного состава и имеющего погрешность измерения ускорения, равную - g sinα. В результате выявленная методическая погрешность минимизируется. Следует отметить, что предложенное решение имеет аналоговый выход для формирования выходного аналогового сигнала, пропорционального ускорению Wx, дискретный выход, количество импульсов с которого пропорционально величине и изменению измеряемой скорости Vx. Этот дискретный выходной сигнал интегрируют при помощи обычного сумматора (счетчика) импульсов и формируют сигнал, пропорциональный перемещению Х подвижного состава. Все эти сигналы в цифровом виде представляются на табло цифровой индикации.
Фиг.1 - функциональная схема ПМА со схемой коррекции методической погрешности акселерометра. Здесь обозначено: 1 - поплавковый узел ПУ (чувствительный элемент ПМА), где размещена неуравновешенная инерционная масса Им; 2 - датчик угла ДУ ПМА; 3 - датчик момента ДМ; 4 - фазочувствительный выпрямитель ФЧВ контура обратной связи ПМА; 5 - корректирующий контур КК; 6 - усилитель мощности ("электрической пружины"); 7 - входной усилитель УС; 8 - пороговое устройство ПУ; 9 - мостовой переключатель МП; 10 - стабилизатор тока СТ; коммутаторы (транзисторные ключи) МП отмечены на нем точками - преобразователь тока - цифровой код с интегрирующей емкостью С; 11 - модифицированный жидкостной маятниковый переключатель (МЖМП) с расширенным линейным участком зависимости выходного напряжения от угла наклона α железнодорожного пути к плоскости горизонта; 12 - сумматор сигналов с МЖМП; 13 - фазочувствительный выпрямитель схемы коррекции ФЧВк; 14 - усилитель с коэффициентом передачи К=g sinα; 15 - усилитель мощности УМ2, подключенный к обмотке коррекции ОК ДМ. Wx - ускорение продольного перемещения подвижного состава; N+ и N- - информационные импульсы дискретного выхода ПМА, характеризующие приращение скорости. По ускорению Wx информацию снимают с аналогового выхода ПМА (на фиг.1 не показан). Аналоговый выход ПМА организуют посредством включения в цепь УМ-ДМ резистора, с которого и снимают выходной сигнал, пропорциональный ускорению Wx. Информацию о величине пройденного пути Х подвижного состава формируют посредством интегрирования дискретного выходного (ДВ) сигнала ПМА (суммирования информационных импульсов с ДВ).
"Способ измерения параметров движения железнодорожного подвижного состава" реализуется следующим образом (фиг.1).
Устанавливают поплавковый маятниковый акселерометр на подвижное основание, при этом совмещают ось чувствительности акселерометра с направлением его движения, а выходную устанавливают вертикально.
Формируют поплавковый подвес чувствительного элемента гидростатического типа, используют при этом нулевую плавучесть чувствительного элемента 1 ПУ.
Формируют контур обратной связи акселерометра - "электрическую пружину" таким образом, что замыкают сигнал датчика угла 2 через усилитель обратной связи (4-5-6) на датчик момента 3. При движении основания с ускорением Wx вдоль оси чувствительности отклоняют поплавок 1 пропорционально ускорению, формируют сигнал усилителя обратной связи (4-5-6) в виде тока в обмотке датчика момента 3, пропорционального ускорению Wx, интегрируют сигнал усилителя обратной связи и формируют при этом дискретный выходной сигнал в виде выходных информационных импульсов, пропорциональный скорости Vx подвижного состава. Интегрируют этот дискретный выходной сигнал и получают сигнал о величине перемещения Х подвижного состава (интегратор Vx на фиг.1 не показан).
Корректируют выходной сигнал акселерометра при перемещении состава по наклонной плоскости (на спусках и подъемах). Судят о величине ускорения Wx по величине тока в датчике момента 3, о величине и изменении скорости движения основания Vx по изменению числа N выходных информационных импульсов с дискретного выхода акселерометра, а о величине перемещения основания Х по величине сигнала на выходе интегратора дискретного выходного сигнала акселерометра, пропорционального произведению скорости Vx и времени t движения основания.
Интегрируют сигнал усилителя обратной связи и формируют при этом дискретный выходной сигнал в виде выходных информационных импульсов, так что устанавливают в цепь датчика момента интегрирующую емкость С.
А при действии ускорения Wx на чувствительный элемент 1 пропускают ток в датчике момента, и формируют при этом изменяющуюся разность потенциалов на обкладках интегрирующей емкости С, по мере накопления заряда на емкости периодически разряжают ее посредством импульсов тока определенной длительности и амплитуды, формируемых преобразователем ток - число импульсов (7-8-9-10), получают при этом дискретный выходной сигнал в виде импульсов N+ и N-.
Корректируют выходной сигнал акселерометра при перемещении состава по наклонной плоскости (на спусках и подъемах) так, что при движении состава на подъемах суммируют сигнал "электрической пружины" и корректирующий выходной сигнал, а при движении состава на спусках алгебраически суммируют сигнал "электрической пружины" и корректирующий сигнал, при этом формируют корректирующий сигнал, пропорциональный g sinα, подают на одну из обмоток - ОК датчика момента 3. Угол α наклона плоскости движения состава к плоскости горизонта определяют при помощи наклономера 11 - модифицированного жидкостного маятникового переключателя МЖМП, построенного на базе жидкостного маятникового переключателя с увеличенной зоной линейного участка зависимости его выходного сигнала от угла α наклона плоскости движения подвижного состава к плоскости горизонта. Это - первый вариант исполнения. Второй вариант: устанавливают прибор на подвижное основание, при этом совмещают ось чувствительности акселерометра с направлением его движения, а выходную ось - вертикально. Формируют поплавковый подвес чувствительного элемента 1 гидростатического типа, используют при этом нулевую плавучесть чувствительного элемента 1 ПМА.
Интегрируют сигнал усилителя (4-5-6) обратной связи и формируют при этом дискретный выходной сигнал в виде выходных информационных импульсов, так что формируют положительный и отрицательный уровень формирования тока в обмотке управления датчика момента 3 и тем самым формируют некоторую зону нечувствительности акселерометра угловых движений поплавка 1.
Отклоняют поплавок 1 относительно основания под действием входного ускорения Wx до момента, когда величина сигнала с выхода датчика угла 2 превысит один из уровней формирования тока в обмотке управления ОУ датчика момента 2.
Формируют в датчике момента 3 ток определенной амплитуды с момента совпадения увеличивающегося сигнала с датчика угла с одним из уровней формирования тока в обмотке датчика момента 3 (т.е. нахождение поплавка 2 за границей зоны нечувствительности) и до момента, когда уменьшающийся сигнал с выхода датчика угла 2 уменьшится до сформированного уровня пропускания тока в обмотке управления (ОУ) датчика момента 3 (т.е. при нахождении поплавка 1 между границами зоны не чувствительности).
Измеряют время нахождения поплавка 1 за границей зоны нечувствительности так, что стробируют ("заполняют") интервал времени нахождения поплавка 1 за границей зоны не чувствительности информационными импульсами, и тем самым формируют дискретный выходной сигнал ПМА в виде этих информационных импульсов N- и N+.
Технический результат - повышение точности измерения параметров поступательного движения подвижного состава за счет применения для этих целей поплавкового маятникового акселерометра и дискретным выходом и контуром коррекции сигнала акселерометра, обусловленного перемещением состава по наклонной плоскости. Технический эффект получается за счет формирования высокоточного подвеса поплавка ПМА гидростатического типа и формирования дискретного выходного сигнала ПМА в двух вариантах исполнения. Далее интегрируют этот дискретный выходной сигнал и получают сигнал о величине перемещения Х подвижного состава. Корректируют выходной сигнал акселерометра при перемещении состава по наклонной плоскости (на спусках и подъемах).
2. Техническое решение "Способ подвеса чувствительного элемента поплавкового маятникового акселерометра и устройства его реализующие" относится к измерительной технике, а именно к поплавковым маятниковым компенсационным акселерометрам (ПМА).
Источники информации
2.1. Бабаева Н.Ф. Детали, элементы гироскопических приборов. Л.: Судпром, 1962, с.247.
2.2. Авторское свидетельство СССР № 605181, G 01 P 15/08, 15/13, 1978.
Известен способ возбуждения опор трения акселерометра путем задания относительного движения опор в направлении вращения подшипников с помощью специального двигателя [2.1]. Наибольшим эффектом по снижению трения в акселерометре характеризуется способ, заключающийся в движении опор в направлении оси вращения с помощью электромагнита, принятый за прототип [2.2] для патента №2039995. Недостатком этого способа является неполное устранение трения в опорах, что является причиной заметного дрейфа выходного сигнала акселерометра.
Целью изобретения по патенту №2039995 (прототип) является повышение точности измерений акселерометра. Цель достигается способом возбуждения опор трения акселерометра, имеющего корпус, маятниковый чувствительный элемент, цапфу на чувствительном элементе и подшипник скольжения на корпусе, датчик перемещения с катушкой ротора на чувствительном элементе и обмоткой возбуждения статора в корпусе, генератор питания, датчик перемещения, магнитоэлектрический силовой преобразователь с компенсационной катушкой на чувствительном элементе и магнитной системой в корпусе, электромагнит с обмоткой возбуждения, усилитель, заключающийся в том, что в режиме предварительных испытаний задают принудительное знакопеременное движение относительно друг друга цапфы и подшипника путем подачи сигнала переменного тока от источника периодического сигнала к элементам акселерометра, тем, что осуществляют одновременное поступательное движение подшипника относительно цапфы в направлении оси вращения цапфы и колебательное угловое движение цапфы относительно подшипника путем подачи моночастотного сигнала переменного тока от единого источника периодического сигнала в обмотку возбуждения электромагнита и компенсационную катушку силового преобразователя, при этом после подачи сигнала одновременно из двух вариантов полярностей включения обмотки возбуждения статора датчика перемещения относительно его генератора питания и катушки ротора датчика перемещения относительно входных клемм усилителя при неизменной полярности включения обмотки возбуждения электромагнита и компенсационной катушки силового преобразователя относительно источника периодического сигнала, компенсационной катушки силового преобразователя относительно выходных клемм усилителя выбирают вариант полярностей включения обмотки возбуждения статора и катушки ротора датчика перемещения, при котором определяемый по результатам измерения выходного сигнала акселерометра дрейф выходного сигнала акселерометра минимален, включают между источником периодического сигнала и компенсационной катушкой силового преобразователя фазосдвигающий элемент, например конденсатор, изменяют фазовый сдвиг между напряжениями питания обмотки возбуждения электромагнита и компенсационной катушки путем изменения параметров фазосдвигающего элемента, определяя при этом дрейф сигнала акселерометра по результатам измерения выходного сигнала акселерометра, выбирают фазовый сдвиг, фиксируя соответствующие параметры фазосдвигающего элемента, при котором дрейф сигнала акселерометра минимален, причем в режиме эксплуатации операции выбора полярности и фазы не производится.
При осуществлении одновременного поступательного движения подшипника относительно цапфы в направлении оси вращения цапфы и колебательного углового движения цапфы относительно подшипника путем подачи моночастотного сигнала переменного тока от единого источника периодического сигнала в обмотку возбуждения электромагнита и компенсационную катушку силового преобразования при выбранном варианте полярностей включения обмотки возбуждения статора датчика перемещения и катушки ротора датчика перемещения и выбранной величине фазового сдвига между напряжениями питания обмотки возбуждения электромагнита и компенсационной катушки обеспечивается максимально возможно суммарное перемещение по двум направлениям движения цапфы относительно подшипника, что увеличивает скорость ее движения и снижает трение в опоре. В результате уменьшается дрейф выходного сигнала акселерометра и повышается точность измерений акселерометра.
Недостатком прототипа является снижение трения в опорах выходной оси за счет создания возвратно-поступательного движения в опорах выходной оси акселерометра. Т.е. трение снижают за счет того, что ведут борьбу не с причиной, а со следствием ее проявления. Причина проявления трения - эта остаточная ненулевая плавучесть чувствительного элемента акселерометра, которая приводит к возникновению механического контакта в камневых опорах выходной оси акселерометра. При этом для минимизации трения относительно выходной оси необходимо минимизировать влияние ненулевой остаточной плавучести чувствительного элемента на формирование механического контакта в опорах выходной оси. Для этого нужно создать условия, чтобы поплавок акселерометра находился во взвешенном состоянии в пределах радиального зазора опор выходной оси. Т.е. необходимо регулировать плавучесть так, чтобы поплавок совершал радиальные перемещения и в его опорах отсутствовало бы взаимодействие их элементов. Для этого необходимо и достаточно изменять массу вытесненной поплавком жидкости в осевом направлении в пределах торцевых зазоров поплавка и корпуса прибора в зависимости от осевого радиального положения поплавка относительно опор выходной оси. С другой стороны, оценивая скорость радиальных переплываний поплавка можно подобрать массу вытесненной поплавком жидкости такую, чтобы скорость радиальных переплываний (поступательных движений) устремилась в ноль. В результате таких мероприятий поплавок будет либо тонуть, либо всплывать в поле силы тяжести (1 вариант решения) между элементами опор выходной оси либо "замрет" (2 вариант) в определенном положении между опорами. При этом при изменении температуры (в не обогревном варианте) плотность поддерживающей поплавок жидкости будет изменяться и поэтому регулирование массы вытесненной поплавком жидкости будет осуществляться по мере изменения плотности и температуры. По первому варианту решения изменится интенсивность радиальных переплываний чувствительного элемента акселерометра. Во втором варианте решения следящая система определит новую скорость переплывания и снова установит массу вытесненной поплавком жидкости такой, чтобы она была минимизирована. Т.е. поплавок снова "замрет" в положении между опорами выходной оси. В результате момент трения опор относительно выходной оси будет минимизирован.
С другой стороны в не обогревном варианте для стабилизации динамических характеристик акселерометра, т.е. вязкости жидкости, вынужденно выбирают поддерживающую жидкость сравнительно маловязкой и имеющую слабую зависимость от температуры окружающей среды. При этом существенно может быть снижен коэффициент демпфирования угловых движений поплавка акселерометра и тем самым ухудшены его динамические характеристики. Для увеличения коэффициента демпфирования здесь предлагается использовать режим сдавливания слоя жидкости между поплавком и корпусом прибора. Для этого в датчике угловых скоростей предлагалось использовать "ребристый" поплавок и корпус прибора. Причем "ребра" поплавка предлагалось размещать в пазах корпуса датчика угловой скорости. Здесь же предлагается развить эту идею и распространить ее на подвес поплавка маятникового акселерометра. В зависимости от желаемого коэффициента демпфирования количество ребер предлагается изменять и тем самым управлять коэффициентом демпфирования угловых движений вокруг выходной оси акселерометра. Особенность гидростатического подвеса акселерометра состоит в том, что в связи с отсутствием вынужденных колебаний поплавка, обусловленных вынужденными колебаниями ротора гиромотора, как в датчике угловой скорости, здесь "оживления" опор выходной оси колебаниями происходить не будет и поэтому контакт элементов опор должен быть минимизирован посредством минимизации (регулирования - устремления к нулю) остаточной текущей не нулевой плавучести. При этом также в подвесе поплавка маятникового акселерометра эффект сдавливания поплавком акселерометра слоев жидкости поступательными движениями также будет минимизирован и поэтому для формирования необходимого коэффициента демпфирования использование "ребристого" поплавка и корпуса ПМА представляется еще более важным.
Задача данной части технического решения подвеса поплавка маятникового акселерометра - повышение точности за счет полного устранения момента трения в центрирующих опорах поплавкового подвеса ЧЭ и обеспечение заданного коэффициента демпфирования угловых движений поплавка относительно выходной оси в без обогревном варианте исполнения.
Первый вариант. Решение поставленной задачи в способе подвеса ЧЭ акселерометра, заключающемся в гидростатической разгрузке опор трения скольжения ЧЭ, имеет особенность такую, что устанавливают датчик перемещений поплавка относительно корпуса прибора, формируют две границы изменения плавучести поплавка в пределах радиальных зазоров опор выходной оси, по сигналам этого датчика следят за перемещением поплавка в пределах зазора опор выходной оси до момента совпадения сигнала с датчика с одной из границ изменения плавучести, в этот момент времени формируют положительное или отрицательное приращение объема поплавка в зависимости от того всплывал поплавок или тонул в поддерживающей его жидкости и тем самым изменяют массу вытесненной поплавком жидкости и знак плавучести поплавка на противоположный, затем снова следят за перемещением поплавка относительно корпуса прибора до момента, когда поплавок не переместится в положение, совпадающее с другой границей изменения плавучести, при этом повторно формируют приращение объема поплавка в зависимости от того всплывал поплавок или тонул в поддерживающей его жидкости и тем самым снова изменяют массу вытесненной поплавком жидкости и знак плавучести поплавка на противоположный, далее процесс настройки плавучести ЧЭ повторяют. Фактически чередование всплытия и погружения ЧЭ представляет собой непрерывный периодический бесконтактный процесс, осуществляемый на протяжении всей работы прибора.
Поплавковый маятниковый акселерометр, который реализует описанный выше способ, включает размещение цилиндрического герметичного поплавка в цилиндрической камере, при заполнении зазоров между ними вязкой несжимаемой жидкостью, обеспечении плавучести поплавка, близкой к нейтральной, имеет особенность такую, что на корпусе прибора и поплавка размещаются элементы датчика относительных перемещений, соединенного с через фазочувствительный усилитель с трехпозиционным пороговым устройством, выходы которого соединяют через коммутирующие элементы мостового переключателя с обмотками датчика силы, закрепленными в торцевых частях поплавка, а его образующая выполнена с парой упругих элементов (сильфонов) или торцевых крышек - упругих мембран, при этом во вторую диагональ мостового переключателя включен стабилизатор тока.
Второй вариант. Для решения поставленной задачи в способе подвеса ЧЭ, заключающемся в гидростатической разгрузке опор трения скольжения ЧЭ, устанавливают датчик перемещений поплавка относительно корпуса прибора, определяют скорость изменения сигнала с этого датчика и пропорционально этой скорости формируют положительное или отрицательное приращение объема поплавка, далее продолжают следить за скоростью изменения сигнала с датчика относительных перемещений поплавка и корпуса прибора и в зависимости от знака и величины скорости повторно формируют положительное или отрицательное приращение объема поплавка, затем процесс повторяют. Периодичность процесса в данном случае может быть обусловлена изменением плотности жидкости при изменении температуры особенно в поплавковых приборах без системы терморегулирования.
Поплавковый маятниковый акселерометр, который реализует описанный выше способ, включает размещение цилиндрического герметичного поплавка в цилиндрической камере, при этом заполняют зазоры между ними вязкой несжимаемой жидкостью, обеспечивают плавучесть поплавка, близкую к нейтральной, имеет особенность такую, что на корпусе прибора и поплавка размещаются элементы датчика перемещений, а выход датчика перемещений подключается к фазочувствительному усилителю и через усилитель мощности к обмоткам датчика силы, закрепленными в торцевых частях поплавка, а его образующая выполнена с парой торцевых упругих элементов (сильфонов) или торцевых крышек - упругих мембран.
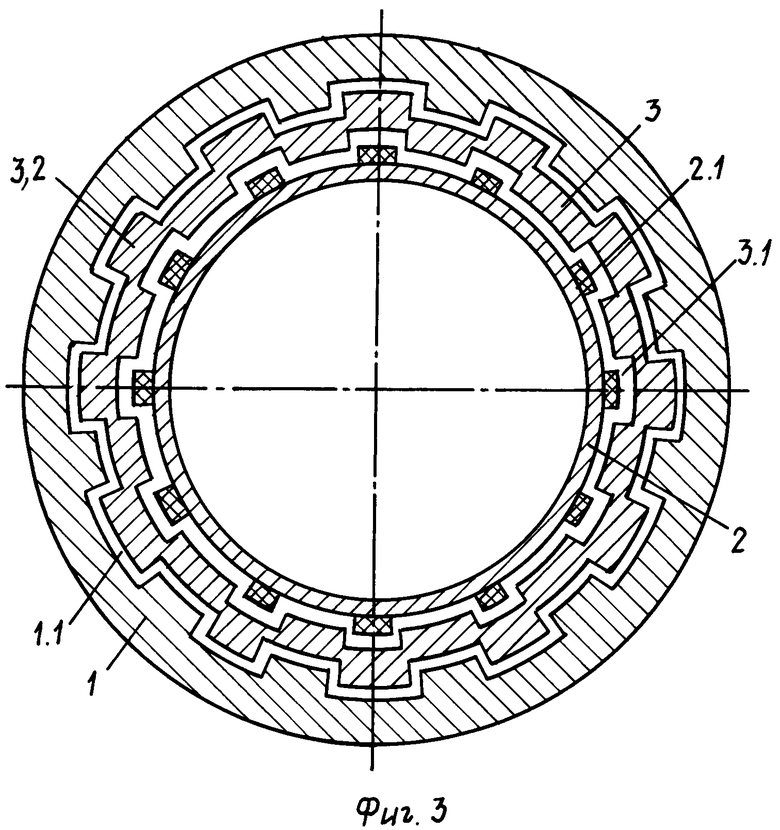
Третий вариант. Способ подвеса чувствительного элемента акселерометра, заключающийся в гидростатической разгрузке опор трения скольжения выходной оси ЧЭ, имеет особенность такую, что цилиндрическую поверхность поплавка выполняют в виде чередующихся выступов и пазов, а корпус акселерометра также выполняют с чередующимися пазами и выступами, причем выступы поплавка и выступы корпуса акселерометра размещают, соответственно, в пазах корпуса акселерометра и пазах его поплавка, при угловых движениях поплавка формируют кроме вязкого трения поверхностей корпуса и поплавка режим сдавливания слоев жидкости между ними и тем самым увеличивают коэффициент демпфирования угловых движений поплавка;
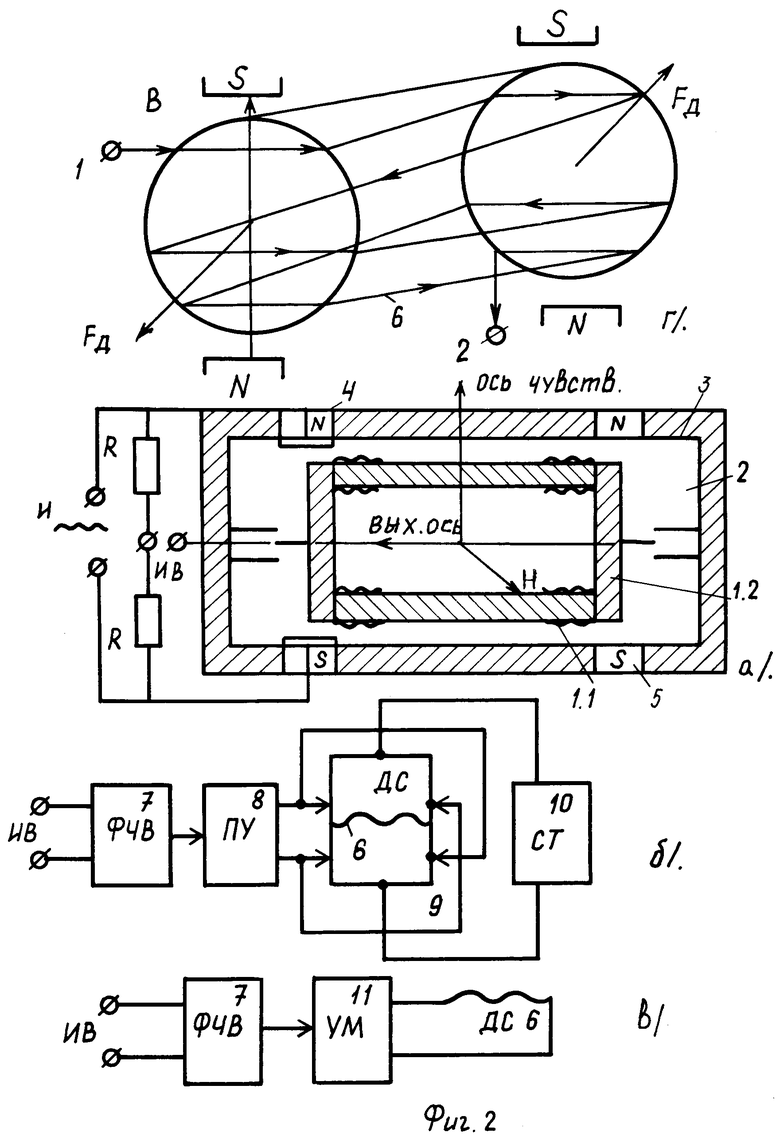
Фиг.2 Конструктивная схема ПМА с устройством регулирования плавучести ЧЭ. Здесь 1 - цилиндрический поплавок; 2 - зазор между поплавковой камерой 3 и поплавком 1; 4 - емкостный датчик перемещений поплавка относительно камеры, R - балансные резисторы датчика перемещений; 5 - постоянные магниты датчика силы; 6 - обмотки формирования тока датчика силы; Fд - силы, деформирующие корпус поплавка; В - вектор магнитной индукции; 7 - фазочувствительный усилитель и выпрямитель (ФЧВ) сигнала датчика перемещений; 8 - пороговое устройства ПУ; 9 - мостовой переключатель; 10 - стабилизатор тока (СТ); 11- усилитель мощности УМ; Uв - выходное напряжение датчика перемещений поплавка относительно корпуса прибора. 1*-2* - клеммы обмоток формирования тока датчика силы.
Фиг.3. Поперечный разрез "ребристого" поплавка. 1 - корпус ПМА; 2 - корпус поплавка с выступами 2.1; 3 - промежуточный цилиндрический элемент с пазами 3.1 выступами 3.2. Этот элемент введен в предложенную схему подвеса как вариант увеличения коэффициента демпфирования за счет увеличения количества "ребер" и пазов.
НОВИЗНА. Впервые предложено регулировать плавучесть "ребристого" поплавка ПМА в процессе измерений входных поступательных воздействий.
Способ включает в себя следующую последовательность действий и реализуется с использованием предложенных устройств (Фиг.2), так
в способе подвеса ЧЭ акселерометра, заключающемся в гидростатической разгрузке опор трения скольжения ЧЭ, имеющем особенность такую, что
- устанавливают датчик перемещений 4 поплавка относительно корпуса прибора,
- формируют две границы изменения плавучести поплавка 1 в пределах радиальных зазоров опор выходной оси,
- по сигналам этого датчика 4 следят за перемещением поплавка 1 в пределах зазора опор выходной оси до момента совпадения сигнала с датчика 4 с одной из границ изменения плавучести,
- в этот момент времени формируют положительное или отрицательное приращение объема поплавка 1 в зависимости от того всплывал поплавок 1 или тонул в поддерживающей его жидкости и тем самым изменяют массу вытесненной поплавком 1 жидкости и знак плавучести поплавка на противоположный, затем
- снова следят за перемещением поплавка 1 относительно корпуса прибора 3 до момента, когда поплавок 1 не переместится в положение, совпадающее с другой границей изменения плавучести, при этом повторно
- формируют приращение объема поплавка 1 в зависимости от того всплывал поплавок или тонул в поддерживающей его жидкости и тем самым снова изменяют массу вытесненной поплавком жидкости и знак плавучести поплавка 1 на противоположный, далее процесс настройки плавучести ЧЭ повторяют. Фактически чередование всплытия и погружения ЧЭ представляет собой непрерывный периодический бесконтактный процесс, осуществляемый на протяжении всей работы прибора.
Поплавковый маятниковый акселерометр, который реализует описанный выше способ, включает размещение цилиндрического герметичного поплавка 1 в цилиндрической камере 3, при заполнении зазоров между ними вязкой несжимаемой жидкостью, обеспечении плавучести поплавка 1, близкой к нейтральной, имеет особенность такую, что на корпусе прибора 3 и поплавка 1 размещаются элементы датчика 4 относительных перемещений, соединенного через фазочувствительный усилитель 7 с трехпозиционным пороговым устройством 8, выходы которого соединяют через коммутирующие элементы мостового переключателя 9 с обмотками датчика силы 6, закрепленными в торцевых частях поплавка 1 (см. (г)), а его образующая выполнена с парой упругих элементов 1.1 (сильфонов) или торцевых крышек - упругих мембран, при этом во вторую диагональ мостового переключателя 9 включен стабилизатор тока 10.
Второй вариант. Для решения поставленной задачи в способе подвеса ЧЭ, заключающемся в гидростатической разгрузке опор трения скольжения ЧЭ,
- устанавливают датчик 4 перемещений поплавка 1 относительно корпуса 3 прибора, определяют скорость изменения сигнала с этого датчика 4 и пропорционально этой скорости,
- формируют положительное или отрицательное приращение объема поплавка 1,
- далее продолжают следить за скоростью изменения сигнала с датчика 4 относительных перемещений поплавка 1 и корпуса 3 прибора и в зависимости от знака и величины скорости повторно формируют положительное или отрицательное приращение объема поплавка 1, затем процесс повторяют.
Замечание. Периодичность процесса в данном случае может быть обусловлена изменением плотности жидкости при изменении температуры особенно в поплавковых приборах без системы терморегулирования.
Поплавковый маятниковый акселерометр, который реализует описанный выше способ, включает размещение цилиндрического герметичного поплавка 1 в цилиндрической камере 3, при этом заполняют зазоры 2 между ними вязкой несжимаемой жидкостью, обеспечивают плавучесть поплавка 1, близкую к нейтральной, имеет особенность такую, что на корпусе 3 прибора и поплавка 1 размещаются элементы датчика 4 перемещений, а выход датчика 4 перемещений подключается к фазочувствительному усилителю 7 и через усилитель мощности 11 к обмоткам датчика 6 силы ДС - Гд, закрепленными в торцевых частях поплавка 1, а его образующая выполнена с парой торцевых упругих элементов 1.1 (сильфонов) или торцевых крышек - упругих мембран.
Способ подвеса чувствительного элемента акселерометра, заключающийся в гидростатической разгрузке опор трения скольжения выходной оси ЧЭ, имеет особенность такую, что
- цилиндрическую поверхность поплавка выполняют в виде чередующихся выступов и пазов,
- а корпус акселерометра также выполняют с чередующимися пазами и выступами, причем выступы поплавка и выступы корпуса акселерометра размещают, соответственно, в пазах корпуса акселерометра и пазах его поплавка;
- при угловых движениях поплавка формируют кроме вязкого трения поверхностей поплавка и корпуса прибора режим сдавливания слоев жидкости между ними и тем самым увеличивают коэффициент демпфирования угловых движений поплавка.
Технический результат - повышение точности за счет устранения момента трения в центрирующих опорах поплавкового подвеса ЧЭ и обеспечение регулируемой величины плавучести для осуществления бесконтактного подвеса "ребристого" поплавка. Технический эффект решения состоит в формировании бесконтактного поплавкового подвеса и применения "ребристых" поплавков и корпусов ПМА.
Изобретения относятся к способам измерения параметров движения железнодорожного подвижного состава, а также к измерительной технике, а именно к поплавковым маятниковым компенсационным акселерометрам с дискретным выходом. Способ заключается в установке поплавкового маятникового акселерометра на подвижное основание, при этом совмещают ось чувствительности акселерометра с направлением его движения, а выходную ось устанавливают вертикально, затем формируют поплавковый подвес чувствительного элемента гидростатического типа, используя при этом нулевую плавучесть чувствительного элемента. Формируют дискретный выходной сигнал поплавкового маятникового акселерометра, а также интегрируют этот сигнал и получают сигнал о величине перемещения подвижного состава, кроме того, корректируют выходной сигнал акселерометра при перемещении состава на спусках и подъемах. Техническим результатом является повышение точности измерения параметров поступательного движения подвижного состава, за счет применения для этих целей поплавкового маятникового акселерометра с дискретным выходом и контуром коррекции сигнала акселерометра. 7 н. и 2 з.п. ф-лы, 3 ил.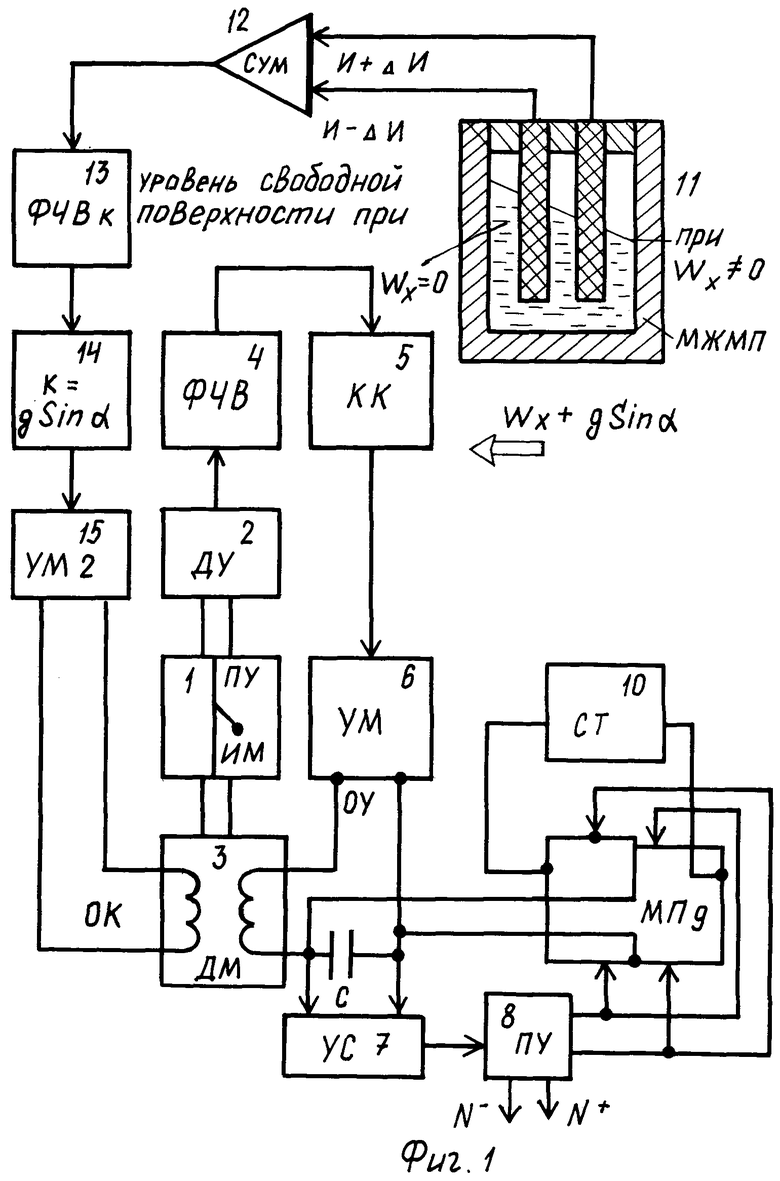
| АНДРЕЙЧЕНКО К.П | |||
| Динамика поплавковых гироскопов и акселерометров | |||
| - М.: Машиностроение, 1987, с.7, 87-104 | |||
| Поплавковый маятниковый акселерометр | 1981 |
|
SU1040425A1 |
| УСТРОЙСТВО ДЛЯ СООБЩЕНИЯ СКАЧКООБРАЗНОГО | 0 |
|
SU395717A1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2149357C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2025321C1 |
| Агрегат для прессования изделий | 1956 |
|
SU110963A1 |
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2002 |
|
RU2229100C1 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |

