(54) ИСКУССТВЕННАЯ СТОПА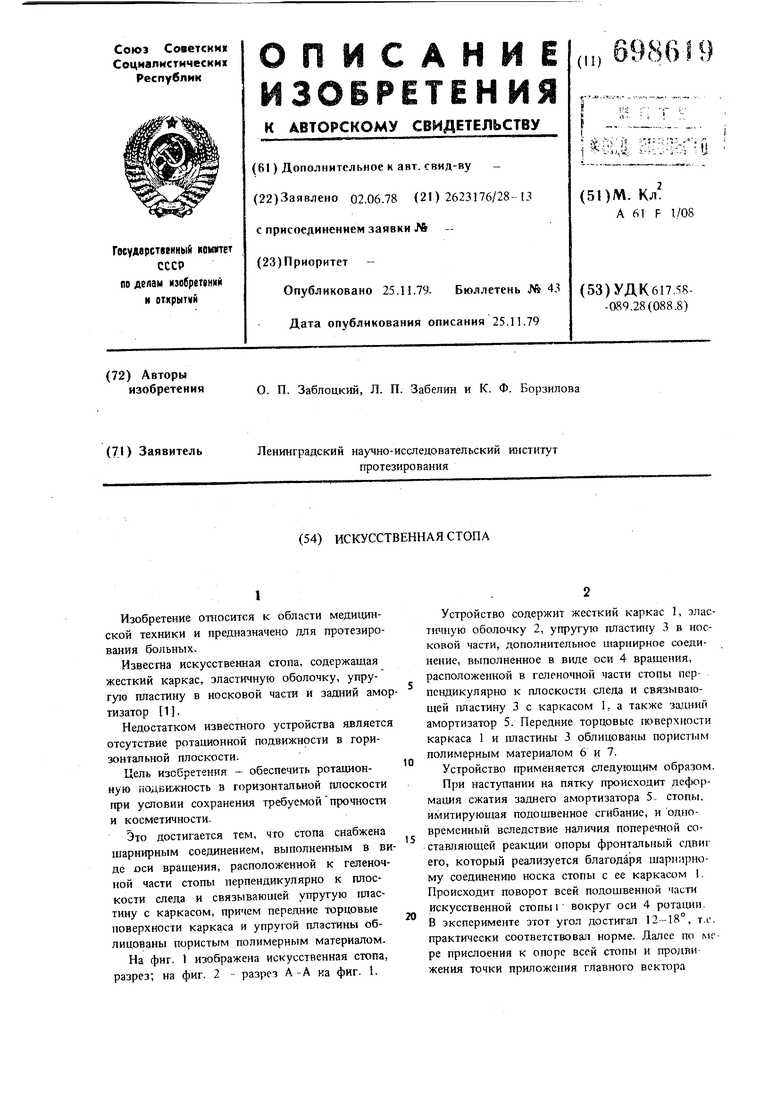
| название | год | авторы | номер документа |
|---|---|---|---|
| Голеностопный модуль | 1990 |
|
SU1816205A3 |
| ИСКУССТВЕННАЯ СТОПА | 2002 |
|
RU2209611C1 |
| СТОПА ПРОТЕЗА НИЖНЕЙ КОНЕЧНОСТИ | 1993 |
|
RU2061444C1 |
| Искусственная стопа | 1988 |
|
SU1731209A1 |
| ИСКУССТВЕННАЯ СТОПА ДЛЯ ПРОТЕЗОВ НИЖНЕЙ КОНЕЧНОСТИ | 1994 |
|
RU2086213C1 |
| ИСКУССТВЕННАЯ СТОПА | 2000 |
|
RU2239393C1 |
| Искусственная стопа | 1976 |
|
SU738618A1 |
| ИСКУССТВЕННАЯ СТОПА | 1971 |
|
SU311635A1 |
| ИСКУССТВЕННАЯ СТОПА (ВАРИАНТЫ) | 2006 |
|
RU2330631C1 |
| ИСКУССТВЕННАЯ СТОПА И СПОСОБ УПРАВЛЕНИЯ ЕЕ ДВИЖЕНИЕМ | 2007 |
|
RU2419398C2 |
1
Изобретение относится к области медицинской техники и предназначено для протезирования больных.
Известна искусственная стопа, содержащая жесткий каркас, эластичную оболочку, упругую пластину в носковой части и задний амотизатор 111.
Недостатком известного устройства являетс отсутствие ротационной подвижности в горизонтальной плоскости.
Цель изобретения - обеспечить ротационную подвижность в горизонтальной плоскости при условии сохранения требуемой прочности и косметичности.
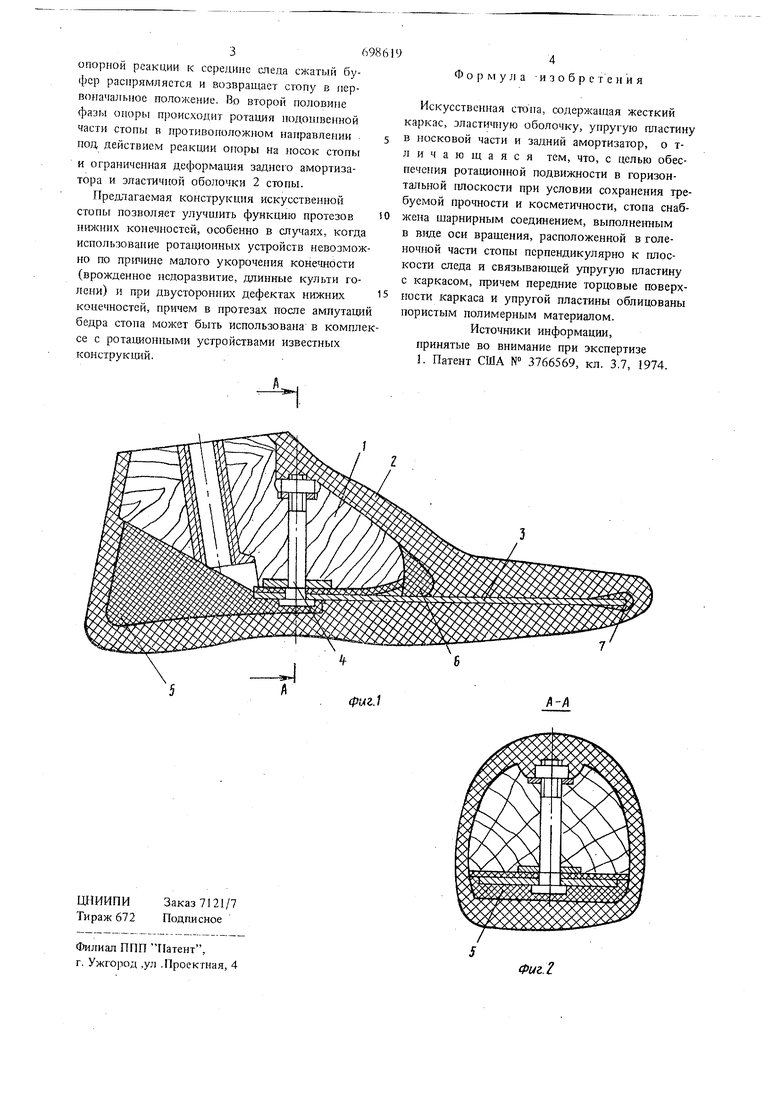
Это достигается тем, что стопа снабжена шарнирным соединением, выполненным в виде оси вращения, расположенной к геленочной части стопы перпендикулярно к плоскости следа и связывающей упругую пластину с каркасом, причем передние торцовые поверхности каркаса и упругой пластины облицованы пористым полимерным материаломНа фиг. 1 изображена искусственная стопа, разрез; на фиг. 2 разрез А-А на фиг. 1.
Устройство содержит жесткий каркас 1, эласт№(ную оболочку 2, упругую пластину 3 в носковой части, дополнительное шарнирное соединение, выполненное в виде оси 4 вращения, расположенной в геленочной части стопы перпевдикулярно к плоскости следа и связывающей пластину 3 с каркасом 1, а также задний амортизатор 5. Передние торцовые (юверхности каркаса 1 и пластины 3 облицованы nopncTMNf полимерным материалом 6 и 7.
Устройство применяется следующим образом.
При наступании на пятку происходит деформация сжатия заднего амортизатора 5- стопы, имитирующая подошвенное сгибание, и одновременный вследствие наличия поперечной составляющей реакции опоры фронтальный сдвиг его, который реализуется благодаря шарнирному соединению носка стопы с ее каркасом 1. Происходит поворот всей подошвенной части искусственной стопы t вокруг оси 4 ротации. В эксперименте этот угол достигал 12-18°, т.е. практически соответствовал норме. Далее по мере прислоения к опоре всей стопы и продвижения точки приложения главного вектора
