(54) ИСКУССТВЕННАЯ СТОПА
| название | год | авторы | номер документа |
|---|---|---|---|
| Искусственная стопа | 1985 |
|
SU1338856A1 |
| Искусственная стопа | 1981 |
|
SU1018632A1 |
| НОСОК | 2006 |
|
RU2392837C2 |
| ИСКУССТВЕННАЯ СТОПА | 2002 |
|
RU2209611C1 |
| Протез голени с голеностопом | 2024 |
|
RU2832615C1 |
| Голеностопный узел протеза | 1984 |
|
SU1266538A1 |
| ИСКУССТВЕННАЯ СТОПА | 1999 |
|
RU2200513C2 |
| Способ лечения врожденной косолапости | 1988 |
|
SU1715329A1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ПЛОСКОВАЛЬГУСНОЙ ДЕФОРМАЦИИ СТОПЫ | 2000 |
|
RU2188598C1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 1998 |
|
RU2132665C1 |
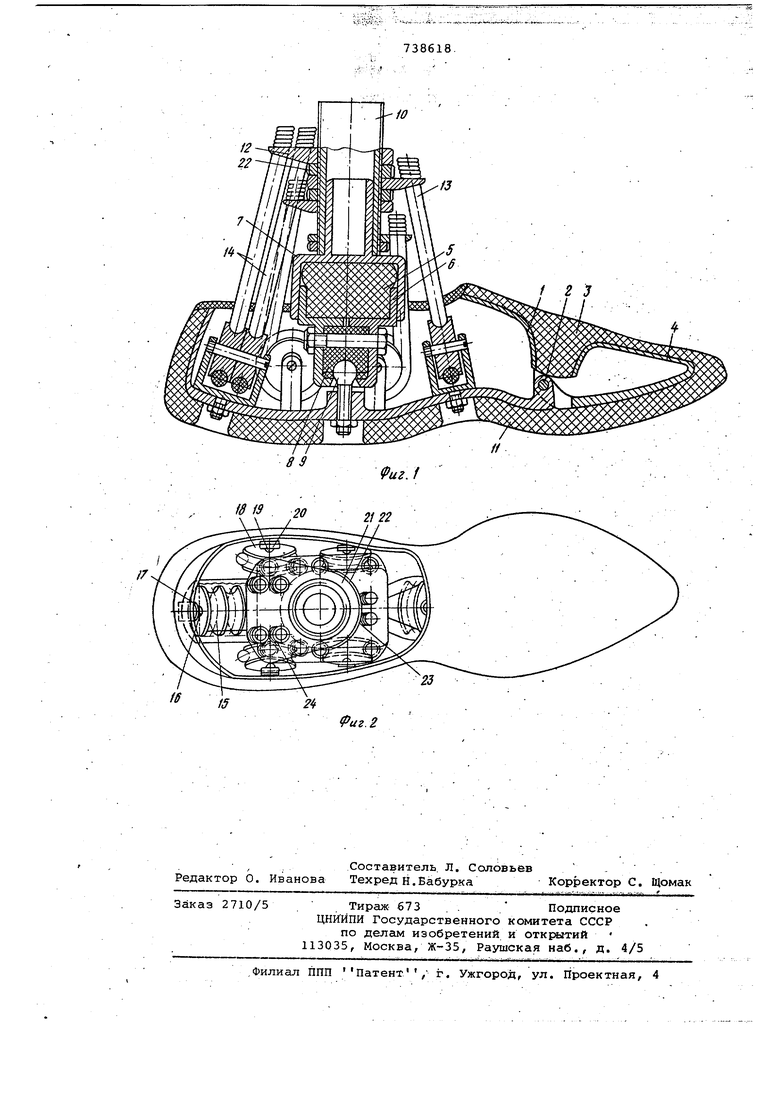
Изобретение относится к медицинской технике, аименно к протезам ниж них конечностей. Известна искусственная стопа, которая содержит каркас с пяточной частью и носковую часть, шарнирно соединенную с каркасом, щиколотку с голеностопным амортизатором 1, Однако эта стопа не может в до- . статочной степени имитировать ахиллово сухожилие и уменьшить напряжения в несущих элементах искусственной стопы при со.здании эластичноупругой подвески стопы к протезу , а также плавной регулировки зарессорен ности движений супинации, пронации, сгибания, разгибания, конические двИ жения стопы и улучшения силового вза имоцействия протеза с больно го, В результате стопа затрудняет ходьбу инвалида и не обеспечивает эластично-упругую походку. Целью изобретения является облегчение ходьбы инвалида и создание эластично-упругой походки, а также обеспечение возможности плавной рег лировки движений в стопе. Поставленная цель достигается тем что стопа снабжена механизмом натяже ния щиколотки, включающим, по меньшей мере, один сдвоенный блок, расположенный в пяточной части, и одинарные блоки, расположенные в пяточной и боковых частях, при этом каждый блок содержит амортизатор со средством натяжения, огибающий ролик, установленный с возможностью поворота на оси, закрепленный на каркасе посредством кронштейнов, а щиколотка связана с каркасом шарнирно через стакан с хвостовиком, входящий в отверстие щиколотки через телескопически соединенный с ним опорный стакан, причем голеностопный амортизатор расположен в полости, образованной стаканами, ., Кроме того, механизм натяжения резиновых аморвизавторов выполнен в виде установленных на щиколотке поворотных и подви кно-фиксируемых в направлении вертикальной оси протеза дисков с контргайками, а стакан содержит вкладыши под сферическую опоPi, резьбовой конец которой соединен с каркасом. На фиг, 1 изображена в сечении искусственная стопа, вид сбоку; на фиг, 2 - то же, вид сверху. Искусственная стопа содержит литой каркас 1 с пяточной частью, соединенный при помощи шарнира 2 и буфера 3 с носковой частью 4. В каркасе установлен голеностопный амортизатор 5, .вставленный в,полость, об- i разованную двумя телескопически соединенными стаканами 6 и 7. Причем на стакан 6 по ходовой посадке насажен. 6хватывающий опорный стакан 7. Стакан б содержит вкладыши 8 сферического шарнира, охватывающие регулируемую:|пр высоте сферическую опору 9,
оснащенную резьбовым хвостовиком со шлицом для соединения с каркасом, а стакан 7 вставлен в щиколотку 10. . Под каркасом расположена стелька 11. На щиколотке размещен механизм 12 натяжения амортизаторов 13. Сдвоенные амортизаторы 14 соединены с поворотными сдвоенными блоками 15, которые снабжены огибающими роликами, заКреплеййыйи/на оси 16 в вильчатом крЬнштейне 17, установленном в пяточном отделе стопы. С передней,наружной и внутренней сторон внутри карка-; са вмонтированы одинарные поворотные блоки 18 с огибающими роликами,закрепленными на осях 19 в вильчатых кронштейнах 20. Сдвоенные и одинарные блоки, амортизаторы со,средствами на-тяжения образуют механизм натяжения щиколотки. Механизм натяжения резиновых амортизаторов выполнен в звиде поворотных и вертикально подвижных дисков 21 с опорЬй на к6нтрга йкй 22, завинченные на (диколотке. В дисках .выбраны отверстия 23 под сменные амортизаторы.Голеностопный амортизатор смещен относительно щйкдлотки к пёр бднёЙУ отделу стёльки. Концы всех амортизаторов обжаты при помощи ку-. лонов 24.
Устройство работает следующим образом. При цикле времени, составляющём оЙин двойной iiiar, в asTjrопоры на пяточный отдел от момента прикасания стопы к полу до момента соприкосновения с ним всей стопы и в период опоры Hai всю стопу от момента сШрйкЪсновения всей Ьтопы. с;полрм . до момента отрыва пЯткй а: Также в период опоры на передний отдел с моМёнта отрыва пятки от пола до момента отрыва.пальцев обеспечивается имитация работы ахиллова сухожилия при помощи сдвоенных амортизаторов 14 и эластично-упругая подвеска стопы к протезу работой амортизаторов 13, переменное натяжение которых пЬво- рачивает ролики .блоков, которые установлены в вильчатых кронштейнах, распблржённых внутри каркаса под уг- лом к оси щиколотки 10. Натяжение
каждого амортизатора осуществляется автономно на соответствующем диске 21, затягиваемой при помощи соответствующей контргайки 22.
. Конструкция данной искусственной стопы позволяет, имитировать ахиллово - сухожилие и уменьшить напряжение в несущих элементах стопы, обеспечить эластично-упругую иоцкеску стопы к протезу, плавную регулировку зарессоренности движений супинации, пронации, сгибания,разгибания и конические движения стопы, а также улучшение силового взаимодействия протеза с культей больного.
Формула изобретения
походки, она снабжена механизмом наТяжения щиколотки, включающим, по
меньшей мере, один сдвоенный блок, расположенный в пяточной части, и одинарные блоки, расположенные в HOdковой и боковых частях, при этом каждый блок содержит амортизатор со средством натяжения огибающий ролик, установ|ленный с возможностью поворота на оси, закрепленный в каркасе
посредством кронштейнов, а щиколотка
связана с каркасом шарнирно через стакан с. хвостовиком, входящий в отверстие щиколотки через телескопически соединенный с ним опорный стакан, причем голеностопный амортйзатор распрло}кен; в полости, образованной стаканами.
с целью обеспечения возможности плавной регулировки движений в стопе, мёхайизм натяжения резиновых амрртизаторо:в выполнен в виде установленрых на щиколотке поворотных и подвижно-фиксируемых в направлении вертикальной оси протеза дисков с контргайками, а .опорный стакан содержит вкладыш под сферическую оп.рру, резьбовой .конец которой соединен с каркасом. - .
.. Источний й иЯ$ормации, принятые во вн имание при экспертизе
