i
Изобретение относится к грузозахватным устройствам, используемым в частности, для подъема затонувших объектов.
Известно захватное устройство для грузов с фигурнрй головкой, содержащее корпус с установленными в нем захватными рычагами и фиксатор . Это устройство, однако не может быть использовано для подъема затонувших объектов.
Наиболее близким к описываемому изобретению является захватное устройство для грузов с фигурной головкой, содержащее корпус со скобами для подвески к грузоподъемному механизму, размещенные в корпусе направляющую втулку, подпружиненные кулачки и взаимодействующее с ними запорное кольцо .
Недостатком этого устройства является недостаточная надежность его работы.
Целью изобретения квляется повышение надежности работы устройства.
Поставленная цель достигается тем, что в корпусе установлено нажимное кольцо и подпружиненные тяги, пзаимодействующне с кулачками, причем тяги соединены с нажимным кольцом двухходовыми стопорами.
При этом каждый двухходовый стопор может содержать цилиндрический корпус, внутри которого установлена двухзубая исполнительная втулка со штоком и взаимодействующая с ней четырехзубая промежуточная втулка, соединенная с нажимным кольцом, а на цилиндрическом корпусе выполнены шлицевые пазы, в которых установлены втулки.
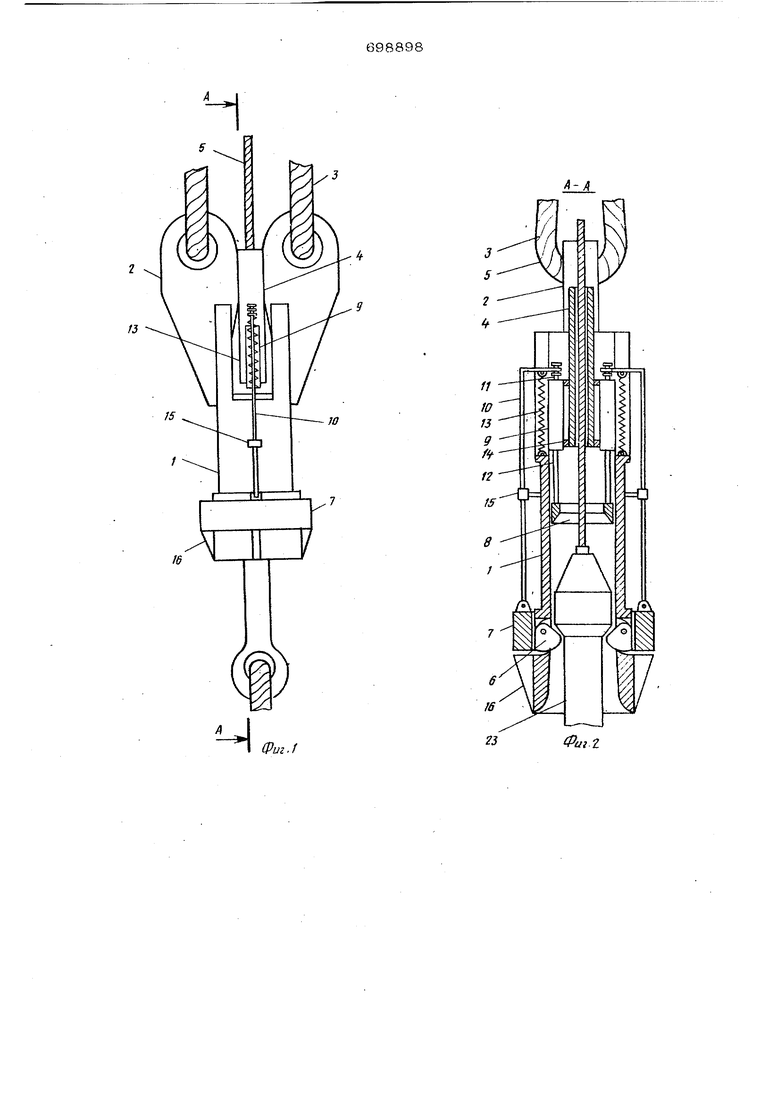
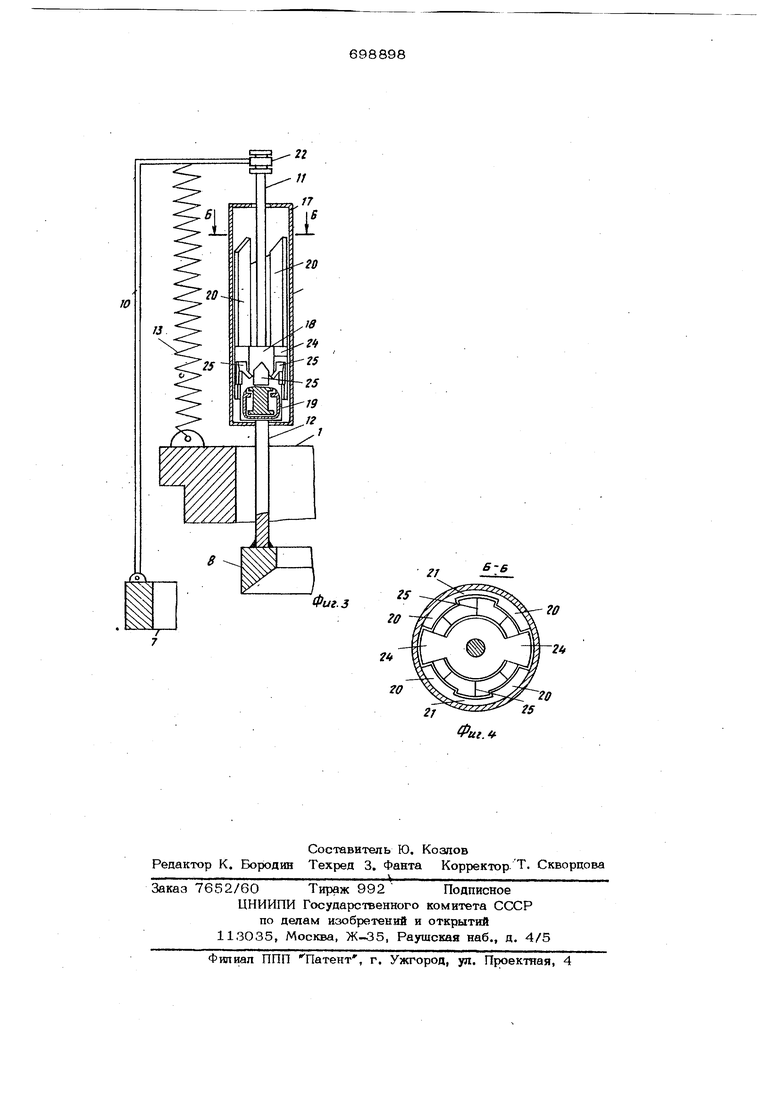
На фиг. 1 показан общий вид устройства; на фиг. 2 - разрез А-А фиг. 1; на фиг. 3 - общий вид двухходового стопора; на фиг. 4 - разрез Б-Б фиг. 3.
Захватное устройство содержит корпус 1 со скобами 2, к которым закрепляются подъемные канаты 3. В корпусе 1 установлена направл$пошая втулка 4, в которой проходит направляющий канат 5, а также подпружиненные опорные кулачки 6, запорное кольцо 7 и нажимное кольцо 8 и Два двухходовых стопора 9. Стопоры 3 9 соединены тягами 10 с ми штоками 11с кольцом ТОЧНЫМИ штоками 12с кольцом 8 к корпусу 1 и тягам,.-10 пршсреплены пружины 13. Стопоры 9 присоединены к направляющей втулке 4 с помощью кронштейнов 14. Тяги 10 подкреплены направляющими кронштейнами с втулками 15. В головной час ти захвата имеются ограничительные угюры 16, Стопор 9 состоит из корпуса 17, выпсотненного в виде пустотелого цшгнндра, закрытого с двух сторон крышками с отверстиями, штока 11, нижний конец которого выполнен в виде двухзубой втулки 13 и штока 12, верхний конец которого выполнен в виде четырехзубой пустотелой втулки 19. Каждая втулка перемещается в пазах, образованных большими шлицами 20 и малыми шлидами 21 на внутренней поверхности корпуса стопора, причем в верхней части корпуса торцы шлиц имеют скошенные под острым углом поверхности. Верхние концы исполнительных штоков соединены с тягами Ю с помощью подшшгаиков 22. Работа предлагаемого автоматического захвата заключается в выполнении следующих операций. К подъекрюму штоку 23, закретгенному на затонувшем объекте, присоед1шяется известным способом один конец направляющего каната, а другой вы носится на поверхность и заводится в за хват через втулку 4, Перед спуском захвата на глубину двухходовые стопоры выводятся в верхнее положение Захват по канату 5 под собственной массой на 1санатах 3 опускается до штока 23. При дальнейшем вхождении штока 23 внутрь корпуса 1 захвата подъемный шток упирается в кольцо 8 и двухходовые стопоры срабатывают. При этом происходит разво рот втулок 18 на 9О по скошенным поверхностям шлиц 20, 21 в результате действия сдвигающего усилия, возникающего на клиновых поверхностях зубьев 24 в плоскости, перпендикулярной оси симметрии корпусов двухходовых стопоров при воздействии на них попарно зубцов 25 втулок 19 с одной стороны и сж мающего действия пружин 13 с другойстороны.
55 № 543549, кл. В 63 С 7/20, 197в. 6988984 исполнительны-Развернувшиеся исполнительные втулки 7, а промажу- 18 при перемещении захвата относительно подъемного штока вверх занимают нижнее положение, В результате этого пружины 13 посредством тяг 10 ставят кольцо 7 на упоры 16, при этом кольцо 7 вдвигает кулачки 6 внутрь корпуса захвата. При приложении нагрузки к захвату подъемный шток упирается на кулачки и происходит подъем объекта, Для того, чтобы осуществить рассоединение захвата с подъемным штоком, не поднимая объект из воды, выполняются следующие операции. Натягивают канат 5, Захват опускается на шток 23, который перемещает кольцо 8 со штоками .12, при этом поднимается чсольцо 7, освобождая кулачки 6. Двухходовые стопоры срабатывают в результате разворота втулок 18, которые своими зубьями 24 опираются на скошенные торцы малых шлиц 21. После срабатывания двухходовых стопоров про извод и1х:я подъем захвата на поверхность. Формула изобретения 1. Захватное устройство для грузов с фигурной головкой, содержащее корпус со скобами для подвески к грузоподьемному механизму, размещенные в корпусе направляющую втулку, подпружиненные кулачки и взаимодействующее с ними запорное кольцо, отличаюш:ееся тем, что, с целью повышения надежности работы устройства, в корпусе установле- но нажимное кольцо и подпружиненные тяги, взаимодействующие с кулачками, причем тяги -соединены с нажимным кольцом двухходовыми стопорами. 2. Захватное устройство по п. 1, о тличающееся тем, что каждый двухходовый стопор содержит цилиндрический корпус, внутри которого установлена двухзубая исполнительная втулка со штоком и взаимодействующая с ней четырехзубая промежуточная втулка, соединенная с нажимным кольцом, а на цилиндрическом корпусе выполнены шлицевые пазы, в которых установлены втулки. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 412116, кл. В 66 С 1/66, 1974. 2.Авторское свидетельство СССР
(Puz.f
Фаг 2
Фиг.З
в-в
27
го
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство закрепления подъемных стропов на корпусе затонувшего объекта | 2017 |
|
RU2664599C1 |
| ЗАХВАТ ШТОКОВОГО УСТРОЙСТВА ПОДВОДНОЙ ЛОДКИ | 2019 |
|
RU2733632C2 |
| ЗАХВАТ ШТОКОВОГО УСТРОЙСТВА ПОДВОДНОЙ ЛОДКИ | 2020 |
|
RU2748088C1 |
| Устройство для остропки затонувших судов | 1976 |
|
SU543549A1 |
| СИСТЕМА Ю.Н.КУНГУРЦЕВА ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1991 |
|
RU2033371C1 |
| Устройство для захвата плавучих объектов при проведении швартовно-буксирных операций | 1981 |
|
SU948754A1 |
| Буровой снаряд и ловитель для извлекаемого пробоприемника бурового снаряда и способ применения ловителя | 1990 |
|
SU1756532A1 |
| Устройство Ю.Н.Кунгурцева для подъема затонувшего объекта из донного грунта | 1990 |
|
SU1710436A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И ПОДЪЁМА ЗАИЛЕННЫХ ПОДВОДНЫХ ОБЪЕКТОВ | 2019 |
|
RU2709057C1 |
| Захватное устройство для раскрывающейся тары | 1988 |
|
SU1654226A1 |