(54) ПРОТИВОБЛОКИРОВОЧНОЕ УСТРОЙСТВО
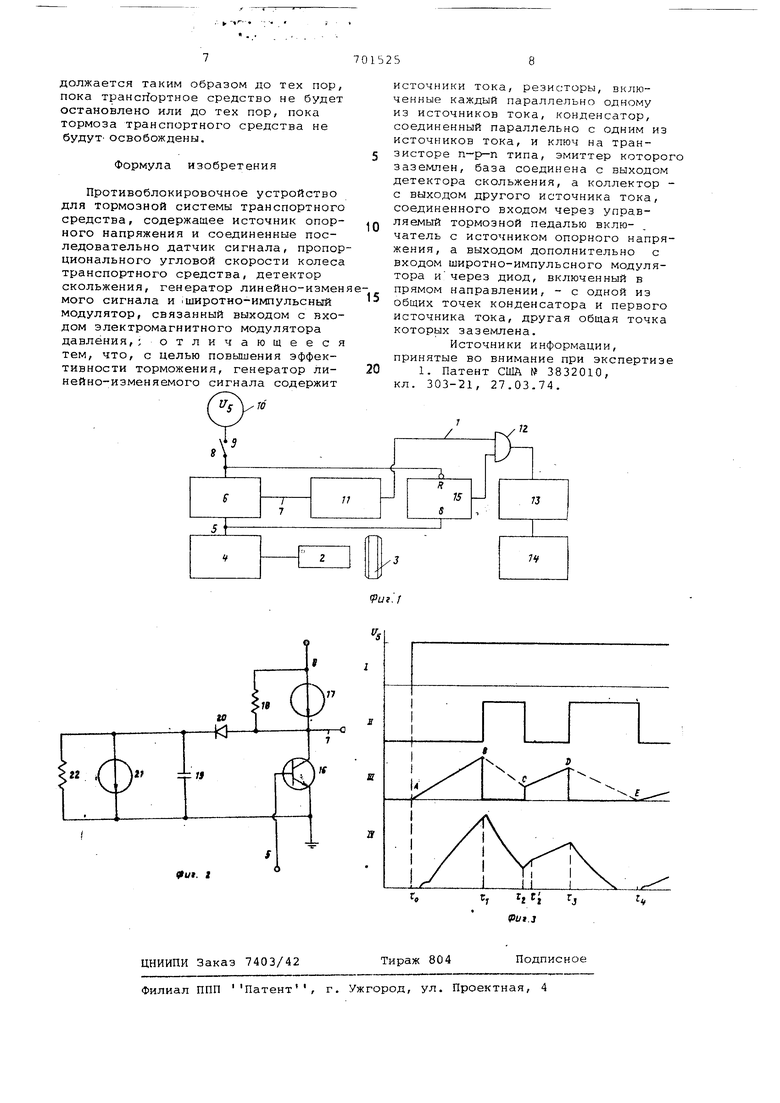
ДЛЯ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО. СРЕДСТВА Выходной сигнал датчика 2 передается на вход детектора скольжения 4, к которому гуюжет быть подключен более чем один .датчик 2 через соответствующую схему выборки известного типа. Детектор 4 скольжения может быть тпобого извест-юго типа и является чувствительн э1г-1 к входному сигналу с датчика 2, чтобы создавать сигнал на выходе 5 детектора при обнаружении начинающегося проскальзывания колеса 3 и ограничи вать сигнал на выходе 5, когда начавшееся состояние проскальзывания оканчивается. Следовательно, сигнал на выходе 5 переключается между дву мя величинами большой величиной, когда детектор 4 воспринимает (чувст вует) начинающееся проскальзывание леса 3 и более низкую величину во в другие промежутки времеь;и. Сигнал с выхода 5 подается в генератор 6 линейно-изменяемого сигнала, которы формирует сигнал управления тормозным давлением на выходе 7, причем п ледний названный сигнал пропорциона лен желаемому уровню давления в тор мозных приводах транспортного средс Второй вход 8 генератора 6 соединен через включатель 9 с источником 10 опорного напряжения U, . Вклю чатель 9 управляется тормозной педа транспортного средства и замкнут, к да тормоза транспортного средства приведены в действие,- и разомкнут, когда тормоза транспортного средства отп тдены. Широтно-импульсный модулятор 11 вырабатывает сигнал, который подает ся через элемент И 12 к электромагнитному модулятору 13 давления. Модулятор 13 управляет связью по текучей среде с тормозными приводами транспортного средства, которые управляют действием тормозов, управ ляющих колесом 3, Триггер 15 имеет вход установки в положение S , который соединен с выходом 5 детек тора, и вход установки Б положение 1 (исходное положение) , который предназначен для приема преобразованных сигналов и, входе 8 rerfepaтора 6. Выходы триггера 15 и модул тора 11 подключены к соответствующ входам элемента И 12, выходной сиг нал которого управляет релейным клапаном, который является частью модулятора 13, т. а. триггер 15 и элемент И 12 обычно запрещают сигнал с модулятора 11, Однако когда детектор 4 воспринимает начало про кальзывания, триггер 15 устанавлив ется в положение 5 , и приводится в действие модулятор 11, чтобы упр лять, действием релейного клапана модулятора 13. Триггер остается в состбдаии, S до тех пор, пока все тормоза транспортного средства не чдут отпущены, в ре: ультате чего граничивается сигнал :а входе 8, гтоэтому триггер 15 ус.-танавливаетя в исхояьое по-пожение. Генератор С линейно-изменяемого игнала содержит ключ на транзисторе 16, база которого подключена к выоду 5 детектора. 4 , ко.ч.чектоР и миттер которого соединены с выхоом 7 и землей соответственгго, Исочник 17 тока .пюбого нзвестисго ипа включен между входом 8 и выодом 1. Резистор 18 включен паралельно,с источником 17 тока. Коненсатор 19 включен параллельно транзистору 16 между его коллектором и эмиттером, причем диод 20 включеь: между коллектором транзистора 16 и соответствующей пластиной конде - сатора 19. Истс. 2 тока лгобого известного типа и резистор 22 включены параллельно конденсатору 19. Разряд конденсатора 19 через выход 7 предотвращается с помощью диода 20, который не мешает заряду конденсатора от источника 17 тока. На фиг. 3 крива.я 1 показывает сигнал на входе 8, кривая 1 сигнал на выходе 5 детектора, кривая Ш показывает сплошь:ой линией сигнал на выходе 7 и прерывистой линией напряжение ,на конденсаторе 19 во временных интервалах, когда напряже.чие на конденсаторе 19 отличается от напряжения на выходе .7, кривая IV показывает давление в тормозных приводах 14. Все графики построены как функция времени. Устройство работает следующим образом. Если в момент времени т,,, происходит нажатие на тормоз, то напряжение Ug прикладывается к-входу 8. Конденсатор 19 начинает заряжаться практически линейно со скоростью, которая определяется разностью в величинах источников 17 и 21 тока. Это показано отрезком АВ кривой Ш на фиг . 3. Поскольку триггер 15 и элемент И 12 запрещают управление модулятором 11 клапана модулятора 13 до тех пор, пока не будет обнаружено начало состояния проскальзывания, беспрепятственная связь по текущей среде с тормозными приводами 14 разрешена, так что тормоза приводятся в действие обычным спчОсобом. В .MCMeiiT) детектор 4 скольжения чувствует начинающееся проскальзывание (кривая Т фиг, 3) , генерирует сигнал начала проскальзывания на выходе 5. Этот сигнал включает транзистор 16, тем самым зазеглпяя выход, а т а к.же устанавливая триггер 15 в состояние 5, чтобы начать самонастраивающееся управление, и застав7:яя модулятор 11 приводить в действие релейный клапан модулятора 13, чтобы начать уменьшенне тормозного давления в тормозных приводах 14. Поскольку выход 7 заземлен, то величина сигнала управления, передаваемого на модулятор 11, находится на его наименьшем возг-южном уровне, пок азанном отрезком ВС на кривой IJ фиг. 3. Выходной сигнал модулятора 11 вынуждает релейный клапан модулятор 13 управлять сбросом тормозного дав ления с максимально допустимой скоростью. Модулятор реагирует на величину сигнала управления на выходе 7, чтобы приводить в действие релей ный клапан в ответ на величину сигнала управления. Когда создается очень низкая величина сигнала управ ления,- например в том случае, когда выход 7 заземлен как представлено отрезком ВС на фиг. 3, модулятор 13 находится в полностью разрял енном состоянии, и, следовательно, ск рость сброса тормозного давления ма симальна. Максимальная возможная величина сигнала управления тормозного давления на выходе 7 равна величине напряжения источника 10 опорного напряжения, следовательно, беспрепятственное увеличение скорос ти тормозного давления будет затем разрешено модулятором 13. Поскольку тормозное давление уменьшается в то время, когда выход 7 зазел%глен, конденсатор 19 должен разряжаться через источник тока 21, поскольку диод 20 препятствует разряду конденсатора каким-либо иным способом. Поскольку конденсатор 19 разряжается через источник 21 тока, скорость разряда линейна, как показано пунктирным отрезком ВС на фиг. 3. Как показано на кривой (v фиг. 3, давление в тормозной камере нарастает по-существу с неограниченной скоростью во временном интервале С и уменьшается по существу с неограниченной скоростью в ,временном интервале . В мо мент 2 появившийся сигнал проскальзывания на выходе 5 исчезает, тем самым выключается транзистор М. В этотМомент величина сигнала управления на выходе 7 равна напряжению на конденсаторе 19. Следовательно, как показано на фиг. 3, величина сигнала на выходе 7 ступенчато поднимается вверх на величину, соответ -ствующую величине заряда конденсато ра 19. Следовательно, модулятор 11 будет вызывать ступенчатое увеличение давления торможения с помощью лейного клапана модулятора 11. Одна ко из-за присущих системе временных задержек привод тормоза не может реагировать на ступенчатое увеличен немедленно, но увеличивает давление торможения с очень высокой скорость в относительно узком временном инте вале С,7 до тех пор, пока давление, определенное величиной сигнала управления, не будет достигнуто,, После прекращения состояния начав-шегося проскальзывания в момент-тг заряд конденсатора 19 снова начинает увеличиваться с линейной скоростью, управляемой разностью величин постоянных источников 17 и 21 тока. Это графически показано отрезком С-Д кривой Ш на фиг. f3. Поскольку модулятор 11 увеличивает давление торможения со скоростью, пропорциональной скорости увеличения величины сигнала управления дaвлeниe в тормозе на выходе 7, давление торможения увеличивается пропорционально в интервалеt -Т- f как показано на кривой 1 на фиг. 3. В момент С2 детектор 4 воспригчимает состояние начинающегося проскальзывания и генерирует сигнал на выходе 5, который включает триггер 15 чтобы снова заземлять выход 7. Следовательно, релейный клапан модулятора 13 разряжается с его максимально возможной скоростью во временном интервале С,, - . В момент детектор ° 4 чувствует, что не существует более состояния начавшегося проскальзывания и, следовательно, ограничивается сигнал о начале проскальзывания на выходе 5. Как показано на кривой N на фиг. 3, давление в тормозных приводах 14 уменьшается с максимально возможной скоростью во временном интервале Tj - т . Конечно, во время этого цикла уменьшения тормозного давления заряд конденсатора уменьшался линейно, как было описано к представлено графически на фиг. 3 пунктирным отрезком Д-Е кривой Щ . Однако временной интервал Т течение которого детектор 4 воспринимает состояние проскальзывания, гораздо дольше, чем временной интервалц-Г и поэтому величина заряда конденсатора 19 уменьшается до тех пор, пока не ;останет ся по существу равной нулю. Если цикл уменьшения давления текучей среды продолжается -дольше, чем временной интервал С- показанный на фиг. 3, заряд конденсатора 19 остается нулевым. Следовательно, когда начавшееся проскальзывание прекращается, в момент не будет существовать никакого ступенчатого увеличения сигнала управления тормозного давления на вькоде 7, как было в момент Гг когда другой цикл уменьшения тормозного давления закончился. Следовательно, величина сигнала управления будет увеличи- ваться .: с практически линейной скоростью, управляемой величиной источников 17 и 21 тока, как было рас-, смотрено выше. Работа системы про