I
Изобретение относится к системам автоматического регулирования общего назначения, используемым в различных отраслях промышленности (энергетической, химической, металлургической) при автоматизации объектов, регулируемых по одному параметру с помощью двух регулирующих органов.
Известны системы автоматического регулирования, реализующие способ комбинированного регулирования одного параметра по двум каналам управления. Эти системы имеют во вспомогательном канале астатический регулятор с изменяемой зоной нечувствительности, на вход которого подается выходной сигнал регулятора в основном канале управления l и 2 ,
Однако-такие системы не обеспечиваю необходимой точности регулирования в том случае, когда оба регулятора являются астатическими, причем регулирующий орган основного (точного) канала регулирования имеет ограниченный диапазон изменения регулируемого параметра.
Прототипом изобретения являетсясистема для автоматического регулирования одного параметра с помощью двух исполнительных органе, содержащая последовательно соединенные датчик обратной связи, блок формирования сигнала ошибки дискриминатор ошибки регулирования, первый усилитель мощности, первый реверсивный исполнительный механизм и первый исполнительный орган, а также последовательно соединенные второй усилите дь мощности, второй реверсивный исполнительный механизм и второй исполнительный орган З.
Однако такой регулятор воздействует на вспомогательный механизм только после того, как основной исполнительный механизм дойдет до крайнего положения, что ухудшает быстродействие регулятора, его точность и устойчивость;
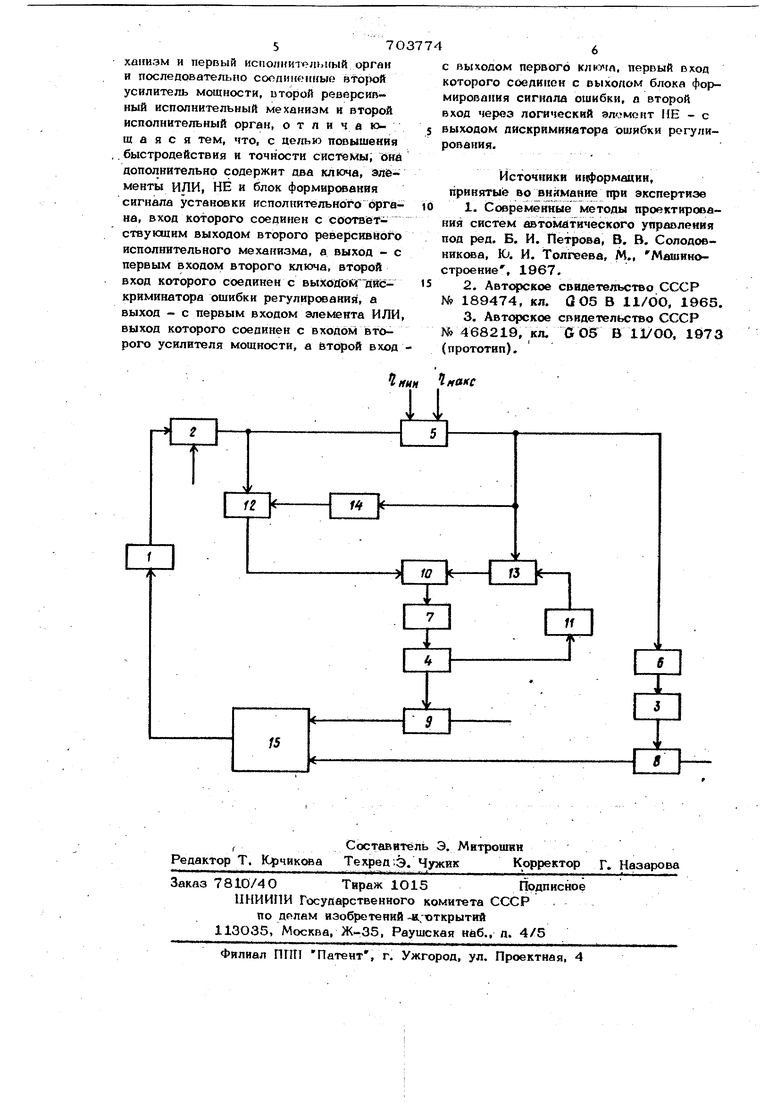
Целью изобретения является разработка системы автоматического регулирования одного параметра с помо1цью двух регулирующих органов, обеспечиваю щей высокое быстродействие, точность регулирования и устойчивость, Это достигается тем, что в систему для автоматического регулирования одного параметра с помощью двух исполнительных органов введены два ключа, элементы ИЛИ, НЕ и блок формирования сигнала установки исполнительного органа, вход которого соединен с соответствующим выход.ом второго реверсивного исполнительного механизма, а выход с первым входом второго ключа. При этом второй вход последнего соединен с выходом дискриминатора ошибки регулирования, а выход - с первым входом элемента ИЛИ, выход которого соединен с входом второго усилителя мощности, а второй вход - с выходом первого ключа, причем первый вход первого ключа соединен с выходом блока формирования сигнала ошибки, а второй вход черезу элемент НЕ - с выходом дискриминатора ошибки регулирования. На чертеже изображена система регулирования и приняты следующие обозначения: 1 - датчик обратной связи, 2 блок формирования сигнала ошибки, 3 и 4 - реверсивные исполнительные механизмы, 5 - дискриминатор ошибки регулирования, 6 и 7 - усилители мощнос 8 и 9 - исполнительные органы, 1О логический элемент ИЛИ, 11 - блок фор мирования сигнала установки исполнител ного органа (в среднее положение), 12 и 13 - ключи, 14 - логический элемент НЕ , IS - объект. Система работает следующим образом Если регулируемый параметр объекта 15, измеряемый датчиком 1 обратной связи, соответствует заданному значени : С точностью до величины зонь нёчуёствительности блока 2 формирования сиг нала ошибки, то н выходе последнего сйгййл отсутствует и исполнительные ор ганы 8 и 9 неподвижны. Если,величина регулируемого параме ра объекта выходит за границы зоны , нечувствительности блока формирования сигнала ошибки, то на его выходе появляется сигнал ошибки регулирования, функционально зависящий от знака и величины рассогласования, а также производной регулируемого параметра. Если величина ошибки регулирования йе° превышает зоны нечувствительности дискриминатора ошибки 5, определяемой верхней и нижней границами п jmixf rijaw, значения к:0topыx подбираются для конкретных условий, сигнал на выходе дискриминатора ошибки отсутствует. При этом на входе и выходе усилителя мошности б сигнал отсутствует, реверсивный исполнительный механизм 3 неподвижен, ключ ,13 закрыт, ключ 12 открыт сигналом с выхода логического элемента НЕ 14 и через eгo и логический элемент ИЛИ 10 сигнал с выхода блока формирования сигнала ошибки поступает на вход усилителя мошности 7, с выхода которого он подается на реверсивный исполните; Ы1ый механизм 4. Последний. меняя положение испрлнительного органа 9, сводит к нулю ошибку регулирования. Если величина ошибки регулирования превышает зону нечувствительности дискриминатора ошибки 5, на выходе последнего .появляется релейный сигнал управления, который поступает через усилитель мощности 6 на реверсивный исполнитель- .. ный механизм 4. Последний,-изменяя положение исполнительного органа 8, уменьшает ошибку регулирования. При этом сигнал с выхода дискриминатора ошибки закрывает ключ 13 через логический элемент НЕ 14, открьшает ключ 13, после чего реверсивный исполнительный механизм Ч, управляемый через открытый ключ 13, логический элемент ИЛИ 10 и усилитель мощности 7 от блока 11 формирования сигнала установки исполнительного органа в среднее положение, устйнавливает последний в среднее по)1Ьжение. После того как ошибка регулирования станет меньше зоны нечувствительности дискриминатора ошибки 5, система ра- , ботает, как изложено выше для случая, когда величина ошибки регулирования не превышает зоны нечувствительности дис-. криминатора ошибки. Применение такой системы позволяет существенно повысить быстродействие, точность и устойчивость управления одйим параметром с помощью двухисполнительных органов. Формула изобретения Система регулирования, содерж&щая последовательно соединенные датчик обратной связи, блок формирования сигнала ошибки, дискриминатор ошибки регулирования, первый усилитель мощности, первый реверсивный исполнительный ме570ханизм и первый исполнительный орган и последовательно соопшк.чгные второй усилитель мощности, цторой реверсивный исполнительный механизм и второй исполнительный орган, отличаюш а я с я тем, что, с целью повышения . быстродействия и точности системы; она дополнительно содержит два ключа, ЭЛ(Вменты ИЛИ, НЕ и блок формирования сигнала установки исполнительного органа, вход которого соединен с соответствующим выходом второго реверсивйоГо исполнительного механизма, а выход - с первым входом второго ключа, второй вход которого соединен с выХОИОй Цйс криминатора ошибки регулирования, а выход - с первым входом элемента ИЛИ, выход которого соединен с вхОдОм второго усилителя мощности, а второй вход с выходом первого , первый вход которого соединен с выходом блока формирования сигнала ошибки, а второй вход через логический эл,моит НЕ - с выходом дискриминатора ошибки регулирования. Источники информации, принятые во jsHJiMaHHe при экспертизе 1.Современные методы проектирования систем автоматического управления под ред. Б. И. Петрова, В, В, Солодовникова, Ю. И. Толгеева, М., Машиностроение, 1967. 2.Авторское свидетельство СССР N9 189474, кл. Q05 В 11/ОО, 1965. 3.Авторское свидетельство СССР №468219, кл. G05 В 11/ОО, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный регулятор | 1979 |
|
SU851334A2 |
| Устройство для регулирования температуры | 1984 |
|
SU1397888A1 |
| Многоканальный регулятор | 1976 |
|
SU596909A1 |
| Частотно-импульсный регулятор температуры | 1981 |
|
SU1010606A1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ ЛАЗЕРА И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2115203C1 |
| РЕГУЛЯТОР ПОЛОЖЕНИЯ ЭЛЕКТРОДА ДУГОВОЙ СТАЛЕПЛАВИЛЬНОЙ ЭЛЕКТРОПЕЧИ | 2006 |
|
RU2334926C2 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| Многоточечная релейно-импульсная система для регулирования параметров технологического процесса | 1980 |
|
SU968782A2 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МОЩНОСТИ ЯДЕРНОГО РЕАКТОРА | 2003 |
|
RU2244350C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
