Изобретение относится к разделу управления и может быть использовано при регулировании параметров сложных электромеханических систем, например, током и скоростью электроприводов постоянного тока.
Известен способ независимого регулирования координат [1], согласно которому для управления каждой переменной измеренные величины сравнивают с их заданным значением, подают разность измеренного и заданного значения на логическое переключающее устройство, которое в свою очередь подключает на вход системы регулирования тот параметр, действие которого в данный момент является определяющим. Способ решает поставленные перед ним задачи, но в некоторых случаях приводит к труднореализуемым видам передаточных функций регулятора.
Известен способ управления электроприводом [2], относящийся к классу систем подчиненного регулирования, согласно которому осуществляется регулирование нескольких переменных в системе электропривода. Способ заключается в том, что измеряют скорость и ток двигателя постоянного тока, сравнивают измеренное значение скорости с заданным и подают сигнал рассогласования на регулятор скорости. Результирующее значение на выходе регулятора скорости считают задающим для регулятора тока, на который подают сигнал обратной связи по току, ограниченный нелинейностью. Управляющий сигнал на усилителе, определяющий напряжение на якорной обмотке двигателя постоянного тока, формируют с учетом действующего напряжения сети. Способ выполняет возложенные на него функции, но имеет ограничение на использование, поскольку быстродействие каждого внешнего контура ниже быстродействия соответствующего внутреннего контура.
Известно устройство для управления параметрами электромеханической системы [3], основанное на использовании способа управления, принятого за прототип, и называемое «структурой с суммирующим усилителем». В прототипе управление скоростью вращения и регулирование тока двигателя постоянного тока производят путем измерения тока и скорости, измеренные их величины подают на вход суммирующего усилителя, а результирующий сигнал после суммирования направляют на вход регулятора. При этом для исключения противоречивых воздействий различных контуров на изменение режима работы электропривода в цепи обратных связей некоторых параметров (в прототипе - тока) вводят нелинейные элементы, отсекающие данную связь при уровне регулируемой переменной, меньше порогового напряжения нелинейного элемента. Основным недостатком данного способа является то, что при наличии отсечек в цепях всех обратных связей задающий сигнал не определяет полностью заданного значения ни одной из регулируемых переменных. При необходимости задания уровня одной переменной возникает потребность регулирования отсечки в цепи этой обратной связи и задающего воздействия. Если возникает необходимость регулирования нескольких параметров, задача значительно усложняется. Хотя такое решение даже при наличии указанного недостатка доказало свою эффективность при работе в статических электромеханических системах, оно неприемлемо для систем электропривода, исполнительные механизмы которых требуют очень высокой точности поддержания заданной величины регулируемого параметра при влиянии на систему возмущений (в электроприводе это связано прежде всего с изменением момента нагрузки на валу исполнительного органа). В подобных системах используют астатическое управление, интегрирующие элементы которых не только повышают порядок и степень сложности исходной системы, но и привносят в ее работу специфические эффекты накопления и запоминания информации. Это существенно усложняет переходы из режима ограничений координат в основной режим работы системы. Так, в момент сброса нагрузки после работы системы с перегрузкой наблюдается значительное и нежелательное увеличение скорости рабочего органа, иногда превышающее номинальную скорость. Это объясняется тем, что за время работы контура токовой отсечки интегратор в главном контуре управления успевает накопить значительный по величине сигнал, поступающий по контуру токовой отсечки и подавляющий на этом отрезке времени работы сигнал основного контура регулирования скорости. То есть в режиме перегрузки снижение скорости приводит к уменьшению сигнала обратной связи, действующей на входе интегратора, и чем продолжительнее перегрузочный режим, тем большее значение выходного сигнала накапливает интегратор. Тем самым активное накопление интегратором информации происходит в период действия контура токовой отсечки, когда главная обратная связь основного контура управления становится слабой. Следовательно, использование предложенного в прототипе технического решения при переходе к астатической системе управления путем введения интегратора в контур регулирования резко снижает динамическую точность системы. В связи с этим усовершенствовать закон регулирования предлагается за счет принудительного прекращения интегрирования на интервалах работы контура токовой отсечки путем размыкания цепи на входе интегратора.
Известен автоматизированный электропривод постоянного тока [4], построенный по принципу подчиненного регулирования. Устройство содержит задатчик и датчик скорости, выходы которых подключены соответственно к суммирующему и вычитающему входам регулятора скорости, выходом подключенного к суммирующему входу регулятора тока, выход которого через усилитель мощности подключен к якорной обмотке двигателя, последовательно с которой включен датчик тока, а параллельно датчик напряжения, выход которого через блок выделения модуля подключен к первому входу блока перемножения, второй вход которого соединен с выходом датчика тока. При этом для повышения качества регулирования в широком диапазоне изменения нагрузок и управляющих воздействий в устройство дополнительно введен блок выделения максимального по модулю значения, первый и второй входы которого подключены к выходам соответственно блока перемножения и датчика тока, а выход подключен к вычитающему входу регулятора тока. Устройство выполняет свои основные функции, но обладает недостатком, который особенно ярко проявляется при необходимости введения ограничения координат, например тока, когда превышение указанного параметра сверх допустимого значения приводит к выходу из строя электрического двигателя. Следовательно, основным недостатком устройства является отсутствие возможности ограничения тока электродвигателя.
Известен электропривод постоянного тока [5], содержащий блок управления, электродвигатель постоянного тока, подключенный к выходу мостового ключевого усилителя мощности с управляющими ключами, источник питания, схему ограничения тока, включающую последовательно соединенные датчик тока и дифференциальный усилитель, а также интегратор с самовозвратом, размыкатель, включенный между источником питания и мостовым ключевым усилителем мощности, отличающийся тем, что введены в схему ограничения тока интегрирующее звено, блок выделения модуля, первый триггер Шмитта с порогом переключения, пропорциональным номинальному току, второй триггер Шмитта с порогом переключения, пропорциональным второму контрольному току допустимых перегрузок, первый ограничитель выходного напряжения по амплитуде отрицательного сигнала первого триггера (первый ограничитель), второй ограничитель выходного напряжения по амплитуде положительного сигнала второго триггера (второй ограничитель), третий ограничитель выходного напряжения по амплитуде отрицательного сигнала третьего триггера (третий ограничитель), первый сумматор, второй сумматор, задатчик опорного напряжения интегратора с самовозвратом, второй датчик тока, причем первый и второй датчики тока включены между минусом источника питания и силовыми ключами мостового ключевого усилителя мощности, второй датчик тока соединен с вторым входом дифференциального усилителя, вход интегрирующего звена соединен с выходом дифференциального усилителя, выход интегрирующего звена соединен с входом блока выделения модуля, входы первого, второго и третьего триггеров соединены с выходом блока выделения модуля, выход первого триггера соединен с входом первого ограничителя, выход второго триггера соединен с входом второго ограничителя, выход третьего триггера соединен с входом третьего ограничителя, выход первого ограничителя соединен с первым входом сумматора, выход второго ограничителя соединен с вторым входом первого сумматора, выход блока выделения модуля соединен с первым входом второго сумматора, выход первого сумматора соединен с вторым входом второго сумматора, выход третьего ограничителя соединен с третьим входом второго сумматора, выход второго сумматора соединен с первым входом интегратора с самовозвратом, выход задатчика опорного напряжения соединен с вторым входом интегратора с самовозвратом, выход интегратора соединен с входами двух электронных ключей, выход первого электронного ключа соединен с управляющим входом размыкателя, выход второго электронного ключа соединен с вторыми входами электронных ключей мостового ключевого усилителя мощности, первые входы которых соединены с выходом блока управления. Устройство выполняет свои основные функции, но не может быть использовано при построении замкнутой системы управления, поскольку обратная связь по току предусматривается только для отключения устройства от сети в случае превышения током наперед заданного значения и автоматическое изменение времени срабатывания защиты в зависимости от тока.
Наиболее близким к предлагаемому является устройство модального управления с токовой отсечкой [3]. Устройство состоит из силового преобразователя, напряжение с выхода которого через датчик тока поступает на двигатель постоянного тока, вал двигателя постоянного тока через датчик скорости механически связан с исполнительным механизмом. Задающий сигнал через задатчик интенсивности, неинвертирующий вход сумматора, первый вход суммирующего усилителя подключен к управляющему входу силового преобразователя. В свою очередь, электрический выход датчика скорости через первый усилитель подключен ко второму входу суммирующего усилителя, информационный выход датчика тока через второй усилитель соединен с третьим входом суммирующего усилителя. Кроме этого, выход силового преобразователя через третий усилитель соединен с четвертым входом второго сумматора, информационный выход датчика тока через последовательно соединенные нелинейный элемент контура токовой отсечки, линейный элемент контура токовой отсечки и фильтр подключен к инвертирующему входу суммирующего усилителя. Основным недостатком устройства является низкая и ограниченная точность поддержания заданного параметра регулирования (в данном случае - скорости вращения вала исполнительного механизма) при изменении момента нагрузки на валу исполнительного механизма. Действительно, предложенная система относится к статическим, что предполагает наличие ошибки по выходному параметру в статическом режиме. Попытаемся увеличить точность системы известным способом перехода к астатическому принципу управления, введя интегратор между первым и вторым сумматорами. Для определенности примем следующие значения параметров объекта:
- КСП=22 коэффициент передачи силового преобразователя;
- ТСП=0,008 с постоянная времени силового преобразователя;
- Ra=0,177 Ом активное сопротивление якорной цепи двигателя постоянного тока;
- Та=0,02 с постоянная времени якорной цепи двигателя;
- С=0,976 Вб конструктивная постоянная двигателя постоянного тока;
- ωн=220 рад/с номинальная скорость двигателя постоянного тока;
- Iн=30 А номинальный ток двигателя постоянного тока;
- JΣ=0,67 кг·м2 суммарный момент инерции жесткой механической части;
- k1=1,4 коэффициент усиления первого усилителя;
- k2=0,024 коэффициент усиления второго усилителя;
- k3=0,092 коэффициент усиления третьего усилителя;
- k4=31,7 коэффициент передачи интегратора;
- kТО=200 коэффициент передачи линейного элемента контура токовой отсечки.
Фильтр, предназначенный в прототипе для сглаживания сигнала ошибки, моделируется звеном первого порядка с указанными в прототипе постоянными времени.
Следует отметить, что величины коэффициентов k1, k2, k3, k4 и kTO получены путем синтеза параметров регулятора методом модального управления. Пусть требуется обеспечить время нарастания переходной характеристики системы в линейной зоне ее работы не более 0,2 с при отсутствии перерегулирования по скорости исполнительного механизма и при отсутствии статической ошибки стабилизации его скорости. Эффективное ограничение тока электродвигателя необходимо поддерживать на уровне Iдоп=60 А (двукратное увеличение по сравнению с номинальным значением тока) в режимах его перегрузки.
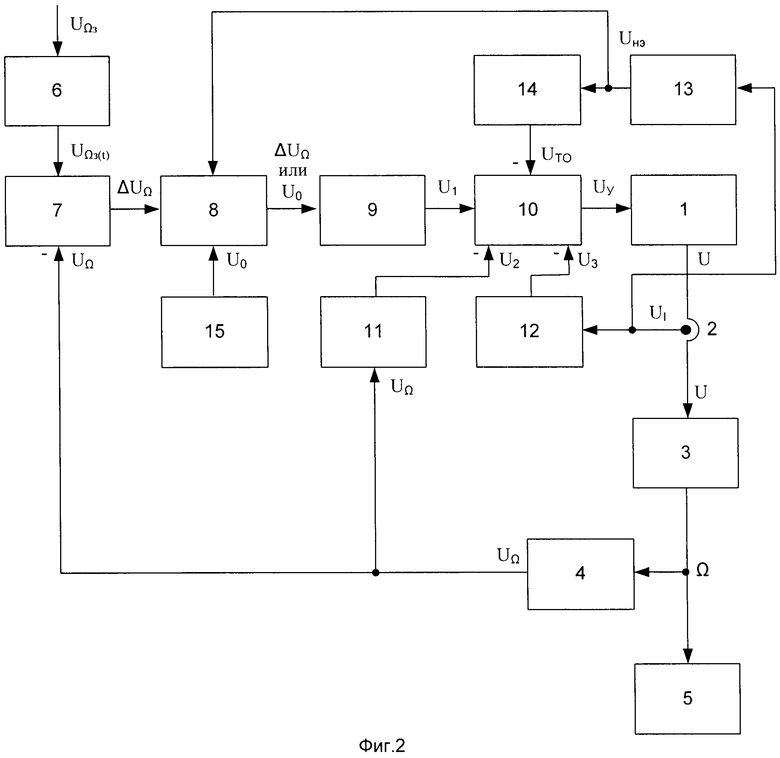
Результаты проведенного компьютерного моделирования рассматриваемого технического решения приведены на Фиг.1. Они представлены переходными процессами тока I, скорости Ω и напряжения на выходе нелинейного элемента Uнэ (это напряжение на фиг.1 дано в разных масштабах для более детального анализа) в режимах:
- пуска исследуемой электромеханической системы с задатчиком интенсивности первого порядка и нелинейным контуром токоограничения на скорость, равную половине номинальной, и при наличии номинального момента на валу (от начала координат до t=5 с);
- последующего увеличения момента нагрузки до трехкратного номинального значения (в момент времени t=5 с);
- дальнейшего уменьшения нагрузки (при t=7 с) до значения Ia=0,1·Iном (режим малых токов).
Анализ полученных результатов указывает на то, что при снятии с вала исполнительного органа перегрузочного момента сопротивления (t=7 с) в системе наблюдается резкое увеличение скорости, достигающей значения, превышающего номинальную скорость. Подобное поведение системы при выходе из режима перегрузки объясняется тем, что за время работы контура токовой отсечки (интервал времени от t=5 с до t=7 с) интегратор в главном контуре управления успевает накопить значительный по величине сигнал вследствие подавления контуром токовой отсечки на этом отрезке времени работы основного контура регулирования скорости. На фиг.1 это хорошо заметно при анализе напряжения Uнэ. То есть в режиме перегрузки снижение скорости приводит к уменьшению сигнала основной обратной связи, действующей на входе интегратора, и чем продолжительнее перегрузочный режим, тем большее значение выходного сигнала накапливает интегратор. Тем самым активное накопление интегратором информации происходит в период действия контура токовой отсечки, когда главная обратная связь основного контура управления становится слабой. Следовательно, использование технического решения, предложенного в прототипе, при переходе к астатической системе управления путем введения интегратора в контур регулирования резко снижает динамическую точность системы.
Технический результат предлагаемого изобретения заключается в увеличении точности процесса регулирования.
Такой результат достигается за счет того, что способ автоматического управления параметрами электромеханической системы, включающий измерение тока и скорости двигателя постоянного тока, ограничение сигнала тока нелинейностью вида «зона нечувствительности» и управление напряжением якорной цепи двигателя постоянного тока по структуре суммирующего усилителя с задатчиком интенсивности, отличающийся тем, что в моменты срабатывания токовой отсечки прерывают действие задатчика интенсивности и обратной связи по скорости, а сигнал управления перед подачей на суммирующий усилитель интегрируют.
Устройство, реализующее данный способ, содержащее тиристорный преобразователь, через датчик тока соединенный с двигателем постоянного тока, который механически связан с датчиком скорости и с исполнительным механизмом, задатчик интенсивности, выход которого подключен к неинвертирующему входу сумматора, инвертирующий вход сумматора соединен с электрическим выходом датчика скорости, второй вход суммирующего усилителя через первый усилитель соединен с электрическим выходом датчика скорости, третий вход суммирующего усилителя через второй усилитель соединен с информационным выходом датчика тока, выход суммирующего усилителя подключен к управляющему входу тиристорного преобразователя, а информационный выход датчика тока через нелинейный элемент контура токовой отсечки и линейный элемент контура токовой отсечки подключен к инвертирующему входу суммирующего усилителя, дополнительно имеет релейный блок, блок организации нуля и интегратор, причем выход сумматора через релейный блок и интегратор подключен к первому входу суммирующего усилителя, выход нелинейного элемента подключен к управляющему входу релейного блока, а ко входу сброса релейного блока подключен блок организации нуля.
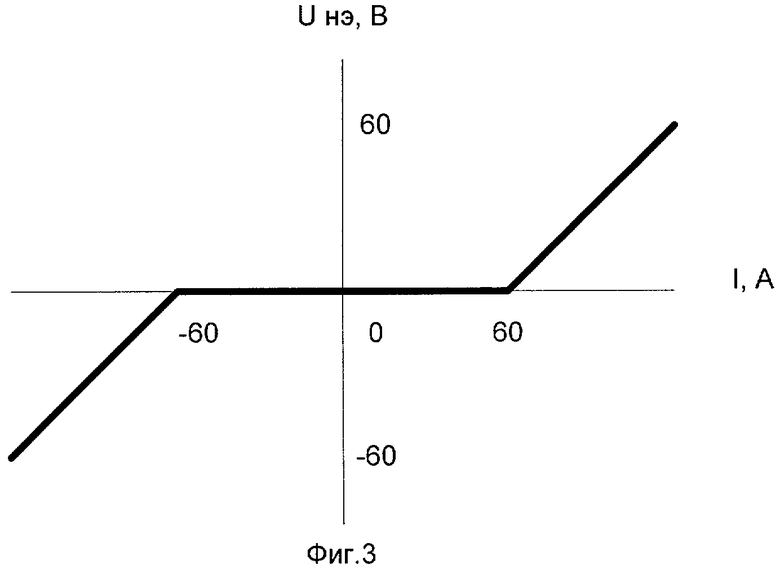
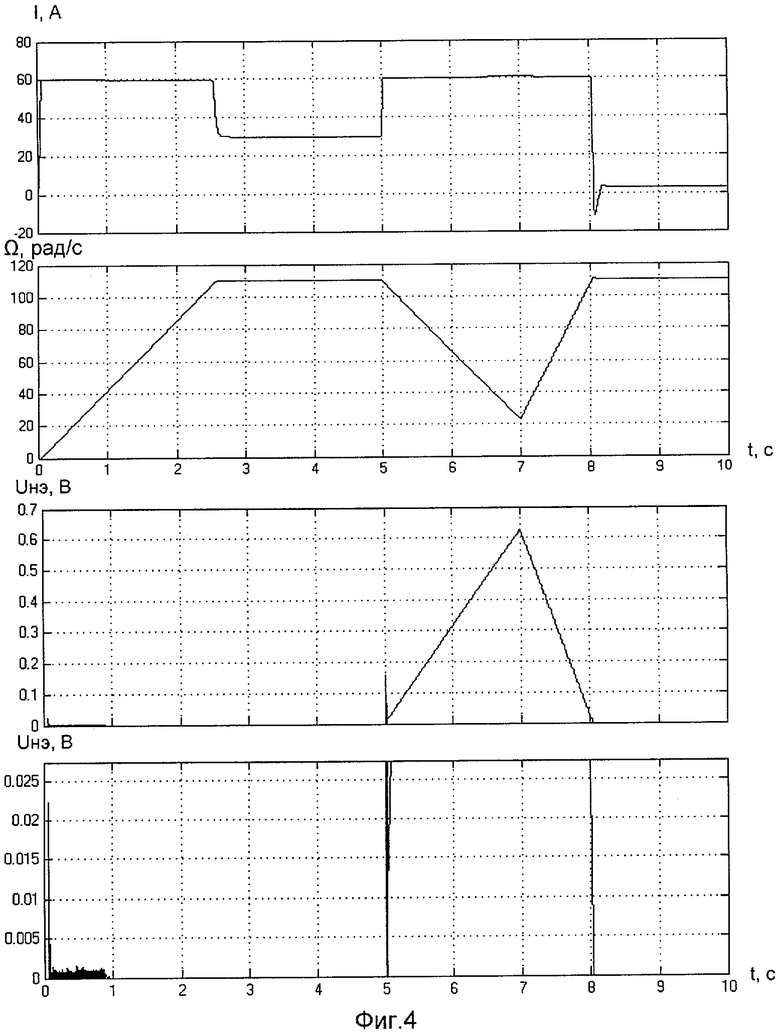
На фиг.2 изображена блок-схема устройства для осуществления предложенного способа, на фиг.3 представлена характеристика нелинейного элемента контура токовой отсечки, на фиг.4 приведены результаты компьютерного моделирования работы устройства, реализующего заявляемый способ при тех же условиях и тех же режимах, которые выбраны для фиг.1.
Для фиг.2 введены следующие обозначения: 1 - тиристорный преобразователь, который формирует напряжение U, через датчик тока 2 поступающее на якорную обмотку двигателя постоянного тока 3 независимого возбуждения. Двигатель постоянного тока 3 механически связан с датчиком скорости 4 и с исполнительным механизмом 5. Величина скорости вращения вала двигателя постоянного тока 3 и исполнительного механизма 5, обозначенная на фиг.2 как Ω, измеряется датчиком скорости 4 и преобразуется им в напряжение UΩ, пропорциональное скорости вращения двигателя постоянного тока 3 и исполнительного механизма 5. Задатчик интенсивности 6, работающий под управлением входного задающего напряжения UΩ3, формирует закон изменения во времени напряжения UΩ(t), определяющий темп его нарастания в режиме пуска и регулирования. Выход задатчика интенсивности 6 соединен с неинвертирующим входом сумматора 7, инвертирующий вход которого соединен с электрическим выходом датчика скорости 4. Сюда поступает напряжение UΩ. Выход сумматора 7 (напряжение ΔUΩ) через релейный блок 8 и интегратор 9 подключен к первому входу суммирующего усилителя 10, второй вход суммирующего усилителя 10 через первый усилитель 11 соединен с электрическим выходом датчика скорости 4. Третий вход суммирующего усилителя 10 через второй усилитель 12 соединен с информационным выходом датчика тока 2. Выход суммирующего усилителя 10 подключен к управляющему входу тиристорного преобразователя 1 в виде напряжения UУ. Кроме этого, информационный выход датчика тока 2 через нелинейный элемент 13 контура токовой отсечки и линейный элемент 14 контура токовой отсечки в виде напряжения U4 подключен к инвертирующему входу суммирующего усилителя 10, а выход нелинейного элемента 13, в свою очередь, подключен к управляющему входу релейного блока 8. Для организации процесса обнуления интегратора 9 на вход сброса релейного блока 8 подключен блок организации нуля 15, вырабатывающий на своем выходе нулевой сигнал U0. Алгоритм работы релейного блока 8 следующий. Если сигнал, поступающий на его управляющий вход с выхода нелинейного элемента 13 контура токовой отсечки нулевой, релейный блок 8 коммутирует на вход интегратора 9 выходной сигнал ΔUΩ сумматора 7. Если же напряжение на выходе нелинейного элемента 13 по абсолютной величине больше нуля, релейный блок 8 подключает ко входу интегратора 9 напряжение U0, равное нулю и вырабатываемое блоком организации нуля 15.
Способ осуществляют следующим образом. В штатных динамических режимах функционирования системы электропривода, к которым можно отнести пуск двигателя постоянного тока под управлением задатчика интенсивности, переход с одной установившейся скорости на другую и торможение, за счет действия обратной связи по скорости вращения, току и токовой отсечки обеспечивается появления условий прекращения интегрирования в контуре регулирования. При этом действие всех обратных связей и отсечки приводит к тому, что система отрабатывает данную ситуацию, ток возвращается к значению, заданному нелинейным элементом, интегрирование возобновляется. Система управления в этом случае действует как астатическая, обеспечивая высокую точность регулирования выходного параметра - скорости двигателя постоянного тока и исполнительного механизма. При этом поддерживается требуемый допустимый диапазон тока двигателя, что гарантирует нахождение и этого параметра в заданных пределах.
Если же в процессе функционирования системы наступают режимы больших отклонений координат, например режим резкого сброса нагрузки на валу двигателя постоянного тока после его нагружения, которые можно классифицировать как режимы с продолжительным переходом значения тока в зону ограничения, интегрирование прекращается на продолжительный период. Скорость на валу двигателя постоянного тока возвращается к заданному значению, не переходя через него, поскольку к моменту достижения скоростью заданного значения ток снижается и входит в границы, заданные нелинейностью в контуре токовой отсечки, и интегрирование возобновляется. Тем самым и в этом режиме система остается астатической, с нулевой ошибкой по такому параметру, как скорость, и минимальными перерегулированиями по параметру «ток». Эти процессы проиллюстрированы на фиг.4, который наглядно показывает, что причина возникновения недопустимого перерегулирования по скорости в момент снятия перегрузки (появление высокого напряжения от контура токовой отсечки при малом значении величины напряжения обратной связи по скорости) в предлагаемом способе устранена.
Устройство автоматического управления параметрами электромеханической системы работает следующим образом. В начальный момент пуска электропривода до скорости вращения в половину от номинальной на вход задатчика интенсивности 6 подают напряжение UΩ3, величина которого определяет интенсивность разгона двигателя постоянного тока 3. Задатчик интенсивности 6 меняет напряжение UΩ3(t) на своем выходе линейно, обеспечивая необходимую стабильность заданного переходного процесса пуска. При этом скорость вращения Ω двигателя постоянного тока 3 и исполнительного механизма 5 начинает возрастать с нуля, и датчик скорости 4 в начальный момент вырабатывает на своем выходе напряжение UΩ=0, что обеспечивает появление напряжения ΔUΩ на входе релейного блока 8. Поскольку ток I двигателя постоянного тока 3 в начальный момент времени нулевой, напряжение UI, снимаемое с информационного выхода датчика тока 2 также нулевое, контур токовой отсечки, представленный нелинейным элементом 13 и линейным элементом 14, не вступил в действие, релейный блок 8 подключает ко входу интегратора 9 разность напряжений ΔUΩ обратной связи по скорости UΩ и напряжение на выходе задатчика интенсивности UΩ3(t)). На этом этапе обратные связи по скорости и току не действуют, суммирующий усилитель 10 формирует напряжение управления UУ только по нарастающему сигналу U1, поступающему от интегратора 9. Начинается увеличение напряжения на управляющем входе тиристорного преобразователя 1. Тот, в свою очередь, линейно увеличивает напряжение U на своем выходе, начинается разгон двигателя постоянного тока 3 и исполнительного механизма 5. Во время разгона увеличиваются напряжения, снимаемые с датчика скорости 4 (UΩ) и датчика тока 2 (UI). Эти обратные связи (по скорости и току) воздействуют на второй и третий входы суммирующего усилителя 10 через первый 11 и второй 12 усилители, как в стандартной схеме автоматического управления. Вместе с тем резко возрастающий ток двигателя постоянного тока 3 приводит к появлению на информационном выходе датчика тока 2 такого напряжения UI, которое превышает уставку нелинейного элемента 13 контура токовой отсечки (вид нелинейности, показанный на фиг.3, называется зоной нечувствительности). В этом случае вступает в работу контур токоограничения и на четвертый вход суммирующего усилителя 10 начинает поступать напряжение с выхода линейного элемента 14 контура токовой отсечки. Ток двигателя стабилизируется на уровне, определяемом шириной зоны нечувствительности нелинейного элемента 13 (в нашем случае 60 А). Как показывают результаты экспериментального исследования математической модели устройства, приведенные на фиг.4, наблюдаются кратковременные переключения релейного блока 8, который при превышении сигналом Uнэ заданного порога в 60 А подает на вход интегратора 9 нулевой сигнал U0 от блока организации нуля 15. Величина U1 на некоторое время снижается, за счет действия обратных связей ток I двигателя постоянного тока 3 возвращается к заданному значению, релейный блок 8 возобновляет работу устройства по стандартной схеме, когда на вход интегратора поступает разность напряжений ΔUΩ, определяющая величину ошибки. Этот процесс соответствует интервалу времени от 0 до 2,5 с на фиг.4, причем уже после первой секунды процесса пуска колебания тока с переходом его величины за границу уставки нелинейного элемента 13 прекращаются и релейный блок 8 больше не подключает нулевого напряжения от блока организации нуля 15 ко входу интегратора 9.
На временном интервале от 2.5 до 5 с от момента начала пуска двигателя фиг.4 иллюстрирует работу устройства на установившейся скорости вращения вполовину номинальной и наличии номинального момента на валу исполнительного механизма 5. В этом режиме устройство функционирует как известные аналоги, обеспечивая отсутствие статической ошибки по скорости вращения Q за счет введенных обратных связей. Поскольку присутствующий в якоре двигателя постоянного тока 3 ток в 30 А не активизирует контур токовой отсечки, переключения релейного блока 8 не наблюдается.
При последующем увеличении момента нагрузки до трехкратного номинального значения (в момент времени t=5 с) устройство реагирует путем снижения скорости вращения двигателя постоянного тока 3, фиксируемой датчиком скорости 4, и увеличения тока, фиксируемого датчиком тока 2. В этом случае нелинейный элемент 13 контура токовой отсечки выходит за пределы зоны нечувствительности, указанной на фиг.3 величиной тока в 60 А, начинает работать контур токовой отсечки, стремясь стабилизировать ток двигателя на заданном уровне, а кроме этого, релейный блок 8 получает команду на отключение от интегратора 9 задатчика интенсивности 6, сумматора 7, а значит, и цепи обратной связи по скорости от датчика скорости 4. Ко входу интегратора 9 релейным блоком 8 подключается нулевой сигнал U0 от блока организации нуля 15. Интегратор 9 не накапливает сигнал, что обязательно происходило бы в устройстве-прототипе.
Результаты моделирования при уменьшении нагрузки (при t=7 с) до значения Ia=0,1·Iном (режим малых токов) показаны на фиг.4. Анализ временных диаграмм указывает на то, что в этом режиме динамическая ошибка по скорости и току гораздо меньше по сравнению с устройством-прототипом. Объясняется это тем, что при выходе из режима перегрузки за время работы контура токовой отсечки (интервал времени от t=5 с до t=7 с) интегратор в главном контуре управления не накапливает значительный по величине сигнал, поскольку основной контур регулирования скорости на этом отрезке времени работы отключается релейным блоком 8, получающим на это команду от нелинейного элемента 13. Иначе говоря, снижение скорости вращения двигателя постоянного тока 3, происшедшее на этапе нагрузки трехкратным моментом и приведшее к увеличению сигнала обратной связи, действующей на входе интегратора 9, не приводит к накоплению им информации.
Предлагаемый способ и устройство для его осуществления позволяют увеличить точность процесса регулирования таких параметров электромеханической системы, как ток и скорость, поскольку принудительно прекращают процесс интегрирования сигнала управления на интервалах работы контура токовой отсечки, исключая накапливание сигнала в интеграторе.
Источники информации
1. Чиликин М.Г., Ключев В.И., Сандлер А.С. Теория автоматизированного электропривода: Учеб. пособие для вузов. - М.: Энергия, 1979. - 616 с. (стр.290, рис.6-20).
2. Патент РФ №2079962. Способ управления электроприводом. Малафеев С.И. Информационный бюллетень «Открытия, изобретения, промышленные образцы и товарные знаки». Опубл. 20.05.1997.
3. Толочко О.И., Тищенко А.А. Анализ узлов токоограничения для систем модального управления приводов постоянного тока / Отчет о НИРС, г.Донецк: ДонГТУ, 1999. Электронный ресурс. - Режим доступа www.masters.donntu.edu.ua/2000/…/2000/mag.htm. Дата обращения 01.12.2009.
4. Патент РФ №2065660. Автоматизированный электропривод постоянного тока. Малафеев С.И. Информационный бюллетень «Открытия, изобретения, промышленные образцы и товарные знаки». Опубл. 20.08.1996.
5. Патент РФ №2050686. Электропривод постоянного тока. Шорников Е.Е., Никитин В.А., Богучаров В.Д., Полуничев И.С. Информационный бюллетень «Открытия, изобретения, промышленные образцы и товарные знаки». Опубл. 20.12.1995.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭКСКАВАТОРНЫЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2068615C1 |
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
Изобретение относится к области электротехники и может быть использовано в автоматизированных электроприводах постоянного тока. Техническим результатом является увеличение точности процесса регулирования. Способ автоматического управления заключается в измерении тока и скорости двигателя постоянного тока, ограничении сигнала тока нелинейностью вида «зона нечувствительности» и управлении напряжением якорной цепи двигателя постоянного тока по структуре суммирующего усилителя с задатчиком интенсивности, прерывании действия задатчика интенсивности и обратной связи по скорости в моменты срабатывания токовой отсечки и интегрировании сигнала управления перед подачей на суммирующий усилитель. Устройство для реализации способа содержит тиристорный преобразователь, датчик тока, задатчик интенсивности, сумматор, датчик скорости, суммирующий усилитель, нелинейный и линейный элементы контура токовой отсечки. Кроме этого, в него введены релейный блок, блок организации нуля и интегратор. 2 н.п. ф-лы, 4 ил.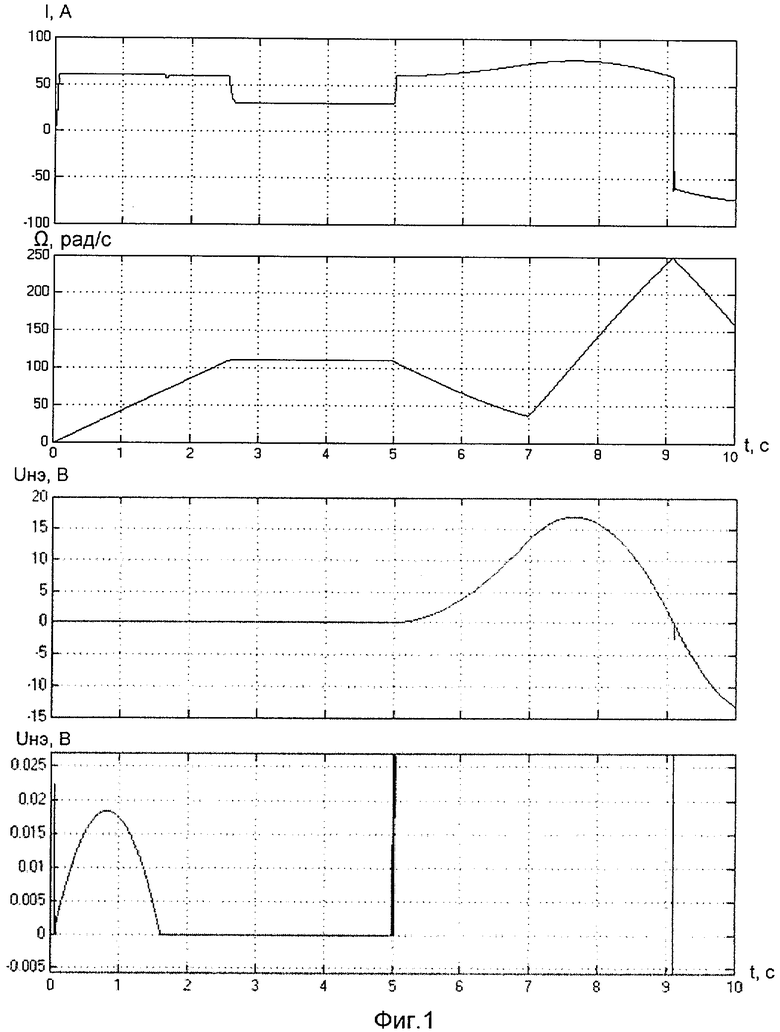
1. Способ автоматического управления параметрами электромеханической системы, включающий измерение тока и скорости двигателя постоянного тока, ограничение сигнала тока нелинейностью вида «зона нечувствительности» и управление напряжением якорной цепи двигателя постоянного тока по структуре суммирующего усилителя с задатчиком интенсивности, отличающийся тем, что в моменты срабатывания токовой отсечки прерывают действие задатчика интенсивности и обратной связи по скорости, а сигнал управления перед подачей на суммирующий усилитель интегрируют.
2. Устройство автоматического управления параметрами электромеханической системы, содержащее тиристорный преобразователь, через датчик тока соединенный с двигателем постоянного тока, который механически связан с датчиком скорости и с исполнительным механизмом, задатчик интенсивности, выход которого подключен к неинвертирующему входу сумматора, инвертирующий вход сумматора соединен с электрическим выходом датчика скорости, второй вход суммирующего усилителя через первый усилитель соединен с электрическим выходом датчика скорости, третий вход суммирующего усилителя через второй усилитель соединен с информационным выходом датчика тока, выход суммирующего усилителя подключен к управляющему входу тиристорного преобразователя, а информационный выход датчика тока через нелинейный элемент контура токовой отсечки и линейный элемент контура токовой отсечки подключен к инвертирующему входу суммирующего усилителя, отличающееся тем, что в него введены релейный блок, блок организации нуля и интегратор, причем выход сумматора через релейный блок и интегратор подключен к первому входу суммирующего усилителя, выход нелинейного элемента подключен к управляющему входу релейного блока, а к входу сброса релейного блока подключен блок организации нуля.
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1993 |
|
RU2050686C1 |
| СПОСОБ УТИЛИЗАЦИИ ОТХОДОВ ГОРЧИЧНО-МАСЛОБОЙНОГО ПРОИЗВОДСТВА | 1996 |
|
RU2099962C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2096903C1 |
| Задатчик интенсивности для быстродействующего электропривода | 1982 |
|
SU1073866A2 |
| ТАБЛЕТКИ ПАРОКСЕТИНА И СПОСОБ ИХ ПРИГОТОВЛЕНИЯ | 1994 |
|
RU2146141C1 |
| US 3983464 A, 28.09.1976 | |||
| JP 2005198467 A, 21.07.2005. | |||

