(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ , , . АДАПТИВНЫМ POBOTOM
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| Устройство для преобразования перемещения в код | 1988 |
|
SU1541480A1 |
| Устройство для ввода информации | 1988 |
|
SU1539763A1 |
| Акустический профилемер подземных полостей, заполненных жидкостью | 1989 |
|
SU1786458A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| СПОСОБ ПЕРЕДАЧИ ДОПОЛНИТЕЛЬНОЙ ИНФОРМАЦИИ В СИСТЕМЕ УКВ-ВЕЩАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2030835C1 |
| Устройство для приема и передачи дискретных сигналов | 1983 |
|
SU1152019A1 |
| Устройство для сопряжения процессора с устройством отображения информации | 1980 |
|
SU900277A1 |
| Устройство сбора и преобразования информации | 1986 |
|
SU1389531A1 |
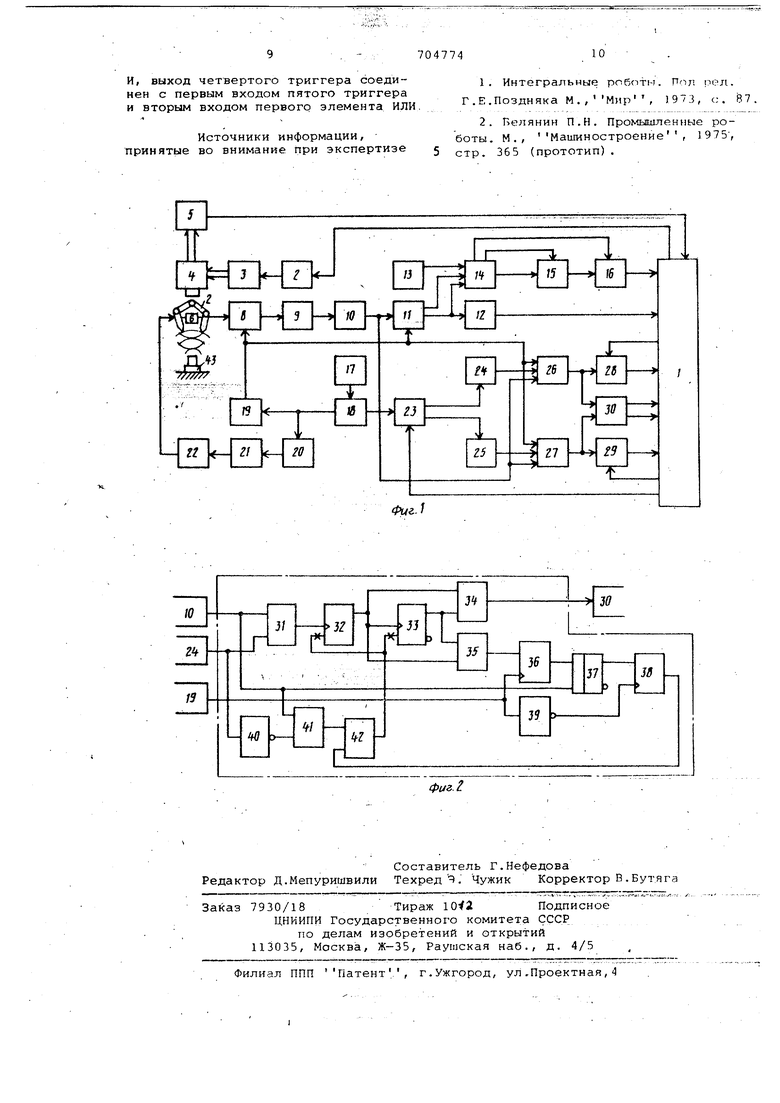
. Изобретение относится к области робототехники и может быть испоЛ1зЗОвано при автоматизации произвбдс вен ных процессов с йспользованиеН 1Гргб- мышленных роботов.: .Известны устройства для управлени адаптивным роботом. Устройство 1, содержащее телевизионную камеру, вычислительную машину и исполнительный механизм, имеет сложный алгоритм , поиска., требует соответствукицей освеще ности объекта и не дает информации о дальности до объекта. . Наиболее близким техническим ре шением к Данному изобретению являет ся устройство, содержащее последовательно Соединенные вычислительный блок, блок управления, приводы, исполнительный орган и датчики положения, выходы которых подключены к пер вому входу вычислительного блокад и установленный на охвате ультразвуковой датчик 2. К недостаткам этого устройства следует отнести невозможность бесконтактного определения местоположения объекта манипулирования в трехмерном пространстве, распознавания его контуров и последующей стыковки с ним схвата робота, особенно в труднодоступных УСЛОВИЯХ из-за близкого расположений препятствий и в условиях плбХой оптической видимости. --- -- Целью изобретения является расширение функциональных возможностей устройства. Данная цель достигается тем, что устройство содержит последовательно соединенные первый усилитель, амплитудный детектор, формирователь информационных импульсов, первый триггер, преобразователь длительности импульса в код,счетчик импульсов и регистр, формирователь импульсов стробирования, блок управления диапазоном дальности, второй усилитель, генератор счетных импульсов, посл1бдовательно соединенные формирователь задающих «импульсов, генератор несущей частоты и третий усилитель, последовательно соединенные генератор тактовых импульсов , делитель частоты,коммутатор, первый дешифратор, первый дискретньай фильтр и второй триггер и последовательно соединенные второй дешифратор, второй дискретный фильтр и третий триггер, выход которого и выход второго триггера подключены соответственно к третьему и второму входам вычислительного блока, второй и третий выходы которого соединены соответственно со вторыми входами второго и ЬёГОТрПг:г ё через блок управления йиапазоном дальности подключены соответ ственно к четвертому и пятому входам йычйслйтельного блока, второй выход делителя частоты соединен со входами фбрМйрЬваТё йя адагоййх ймггульсбв и формирователя импульсов стробировани выход которого подключен ко вторым входам первого усилителя, первого ™-fpftTYepl « n-6t3B6r6 и вт6рЬго;йс:кретных фильтров, третьи входы которых соединены с выходом формирователя информационных импульсов, выход регистра подключен к шестс му входу вычислитёлтБного блойа, а вход Kbвторому выходу преобразователя дл тёльностги импульса в код, третий вы ход которого соединен со вторым вхо Я:бмсчегт икаимпуЯ срв, второй : вход - с выходом генератора счетных импульсов, а третий вход - со вторым выходом первого триггера и входом второго усилителя, выход которого Ш5дключён к седьмому входу вычисли,тельного блока, вход второго дешифратора соединен со вторым выходом ко - мутатора, вход которого подключен к четвертому выходу вычислит кого бЛока, выход третьего усилител соёдинен со входом ультразвукового датчика, вЫход которого подключен Кпервому входу первого усилителя, такжё тем, что каждый дискретный фильтр содержит первый инвертор, послёдобазгельно Со единеннйё первый зГлемёнт Й четвёртый триггер и второй элемент И, последовательно соед нённые пятый триггер, первый элемент ИЛИ, третий элемент И, шестой триггер и четвертый элейент И и пос ледовательн6 соединённые второй ин вертор, пятый элемент И и второй элемент ИЛИ, второй вход которого подключен к выходу четвертого элемента И, а вь1Ход - ко вторым входам ч:ётвёрт6го трйггёрай Пятбго трйТггё ра, ВЫХОД которого соёдиМён со вторы входом второго элемента И, выход которого подключен к соответствующем входу блока управления диапазоном даль нЬ с тй , выход формирователя информационных импульсов соединен. со вторыми .ходами элемента , И и шестого триггера, а также с пер ™вВй BjidSoM Wepe6rdэлемента И, втррой вход которого И вход й1Гб|зог6 йн вертора подключены к выходу соответ Ствующёго дё111ифра1ора,а выход форми рдвателя импульсов стро6йрованй й со динен со вторым .входой третьего эле мента И и входбмпе1рГвЪ го йМвё ртор а, выход которого подключен ко втс5рому входу чётвертЬго элемента И,выход ™ ётв ёрТогЬ триггера соединён с перв входом пятого триггера и вторым входом первого элемен.та ИЛИ. На фиг. 1 изображена функционал йая йхема сгройства для управлени:я адаптивньхм роботом; на. фиг.2-Г1ринципиальная схема дискретного фильтра. Схемы содержат: вычислительный блок 1, блок управления 2, приводы 3, исполнительный орган 4, датчики положения 5, ультразвуковой датчик 6, установленный на схвате 7, первый усилитель 8, амплитудный детектор 9, формирователь информацион.ньк импульсов 10, первый триггер .11, второй усилитель 12, генератор счетных импульсов 13, преобразователь длительности импульса в код 14, счетчик .импульсов 15, регистр 16, генератор т акт о Bbix импульсов 17, делитель частоты 18, формироватеЛь импульсов стробирования . 19, формирователь задающих импульсов 20, генератор несущей частоты 21, третий усилитель 22, .коммутатор 23, первый дешифратор 24, второй дешифратор 25, первый дискретный фильтр 26, второй дискретный фильтр 27, второй триггер 28, третий триггер 29, блок управления диапазоном дальности 30, первый элемент И 31, четвертый триггер 32, пятый триггер 33, второй элемент И 34, первый элемент ИЛИ 35, третий эле-. . мент И 36, шестой триггер 37, четвертый элемент И 38, первый инвертор 39, втсэрой инвертор 40, пятый элемент И 41, второй элемент ИЛИ 42,объеК: :манипулирования 43, Устройство работает следующим образом. По внешней команде, поступающей по каналу задания, вычислительный блок 1, перерабатывая информацию с датчиков положения 5 и информацию задания, выдает соответствующие сигналы в блок управления 2,. который использует ИХдля непосредственного управлёния приводами 3 многостепенного испо.лнител.вного орга.на 4. С помощью последнего охват 7 выводится в точку трехмерного пространства, в нёпосредств.еннОй близости от которой, находится неориентированный относительно координатных осей объект манипулирования 43.. . Далее вычислительный блок 1 задает первоначальное одиночное сканирующее перемещение схвату 7 и установленному на нем ультразвуковому датчику 6. Ультразвуковые: волны, посылаемые в окружающее пространство ультразвуковым датчиком 6 и отражен ные от препятствия, улавливаются датчиком 6 и.преобразуются э элект- . ричаский сигнал, который поступает на лёрвый усилитель 8. Усиленный сигнал дйлёё ;детектируется амплитудным дёте;йтором 9 и поступает на формирователь информационных импульсов 10,Представляющий собой
пороговое устройство/ позволяющее отстроится от помех, амплитуда которых меньше порога срабатывания формирователя информационных импульсов 10.
Информационный сигнал совместно
с импульсом, стробирования/ совпадающим по времени с моментом излучения пачки ультразвуковых колебаний, поступает на первый триггер 11 с раздельными входами, где временное .запа дывание отраженной ультразвуковой волны, пропорциональное дальности до препятствия преобразуется в ширин
.импульса, а затем вторым усилителем 12 - в напряжение постоянного тока. Кроме того широтно-импульсный сигнал подается в преобразователь длительности импульса в код 14, где заполняется импульсами, вырабатыв.аеЦлми генератором счетных импульсЬв 13, . Число импульсов подсчитывается счетч ком импульсов, 15, показания которого периодически переписываются в регистр 16.
Синхронизирующая импульсная последовательность генератора тактовых импульсов 17, преобразованная делителем частоты 18, поступает на формирователь, импульсов стробирования 1 и формирователь задающих импульсов
i20. Первый вырабатывает стррбирующий сигнал определенной ширины для запирания усилителя 8 и сброса первого триггера 11, второй. - задающий сигнал, который управляет генератором несущей частоты 21. На вход третьего усилителя 22 поступают пачки высокочастотных импульсов, которые после усиления возбуждают излучатель ультр звукового датчика 6.
Коэффициент деления дели.теля частоты 18 при требуемой частоте задающего сигнала определяет частоту генератора тактовых импульсов 17 и минимальный временной интервал, а следовательно и минимальную величину выбираемой.зоны дальности. Прямые и инверсные выходы триггеров, образующих, делитель частоты, с помощью коммутатора 23 по сигналу от вычислительного блока 1 или вручную оператором подключаются в соответствующей комбинации на входы первого дешифратора 24 и второго дешифратора 25, чем достигается выбор нужных.
.. интервалов дальности во всем диапазоне измерений.
Таким образом, с выходов дешифраторов на один из входов первого дискретного фильтра 26 и второго дискретного фильтра 27 поступают сигналы разрешенных зон. На второй вход каждого фильтра подаются из приёмного тракта (с формирователя .информационных импульсов 10) отраженные от препятствия и преобразованные сигналы, несуш.ие информацию о дальности; на тоетий - импульсы стробирования (с формирователя 19). С выходов дискретных фильтров 26 и 27 снимаются сигналы достоверного нахождения препятствия в выбранной зоне дальности. Дополнительная обработ. ка этих сигналов с помощью второго триггера 28, третьего триггера 29 и блокам управления диапазоном дальности ЗО обеспечивает получение следующих сигналов, поступающих в вычислительный блок 1 и используемых им для управления (посредством блока управления 2) приводами отдельных степене1Е4 свободы робота в цикле распознавания детали и выработки команды изменения диапазона 5 дальности по программе для последующего сканирования:
со второго триггера 28 - появление большой дальности;
с третьего триггера 29 - появление малой дальности;
с блока управления диапазоном дальности 30 - переход с большой дальности на малую и переход с малой дальности н.а большую. При 5 этом сигналына сброс триггеров 28 и 29 подаются с вычислительного блока 1 .
Дискретные фильтры 26 и 27, входящие в состав устройства, исклюQ чают влияние случайных помех, по каким-либо причинам появившихся на входе приёмного тракта, на.последующую схему: Это достигается тем, что каждый фильтр пропускает на свой выход в качестве информационного сйг5 нала только тот сигнал с приемного тракта, который появляется в заданном интервале дальности и отсутствует вне его подряд более двух периодов измерения.
0 Таким образом, предлагаемое устройство в совокупности с ультразву. ковым датчиком 6 вырабатывает информационные сигналы, поступающие в вычислительный .блок 1, при пересёче.5 НИИ геометрической осью ультразвукового датчика 6 одного-из характерных контуров исследуемой детали, находящейся в- установленной заранее зоне дальности. Характерные контуры детали образуются следующими границами
поверхностей; наклонная плоскость - горизонтальйая Плоскость, две горизонтальные плоскости разных уровней, линейный горизонтальный контур криво5-линейных поверхностей .
При этом обеспечивается избирательное прослеживание характерных контуров объекта манипулирования в л зоне измерения, отсечение информации, которая не .нужна для определения формы и положения, детале.й, и устранение возможных помех.
После первого сканирующего перемещения схвата 7 происходит локационный захват объекта манипулирования 43. Далее вычислительный блок 1, используя информацию о дальности до объекта манипулирования в цифровой форме эб изменении расстояний J5o ближайшей точки лоцируемой поверхности, о некоторых геометрических размерах объе та манипу шровани я 43 по каналу задания, о положениях всех степеней с боды исполнительного органа 4 с дат чиков положения 5, вырабатывает сиг налы управления устройством (на переключение коммутатора 23 с целью и менения разрешенных зон дальностей, на сброс триггеров 28, 29) и приводами 3 через блок управления 2, обе печивая минимальное число, оптималь ную последовательность и рациональ/Htae траектории последующих сканирую щих перемещений с свата в цикле распознавания объекта манипулй|5ования 43, нахождения его точки наведения и стыковки с ним охвата адаптивного промышленного робота. -Применение изобретения позволяет осуществлять бесконтактное определение формы и расположения объекта в рабочей зоне робота. Формула изобретения 1. Устройство для упра;вЛения адап тивным роботом, содержащее последовательно соединенные вычислительный блок, блок управления,приводы, исполнительный орган-и датчики положенйя, Шходы которых подключены к первому входу.вычислительного блока, и установленный на схвате ультразвуковой датчик, отличающеес я тем, что с целью расширения функциональных возможностей устройства, оно содержит последовательно соединенные первый усилитель,амплитудный детектор, формирователь инфор мационных импульсов, первый триггер, преобразователь длительности импульса в код, счетчик импульсов и регистр, формирователь импульсов стробирования, блок управления диапазоном дальности, второй усилитель генератор .счетных импульсов, последовательно соединенные формирователь задающих импульсов, генератор несущей частоты и.третий усилитель,после довательно соединенные генератор тактовых импульсов, делитель частоты коммутатор, первый дешифратор, первы дискретный фильтр и второй триггер и последовател1бНо соединенные второй дешиф затор, второй дискретный фильг и третий триггер, выход которого и выход второго триггера подключены соответственно к третьему и второму входам Вычислительного блока, второй 1 третий выходы которого соединены соответственно со вторыми входами второго и третьего триггеров, первые входы которых через блок управления диапазоном дальности подключены соответственна к четвертому и пятому входам вычислительного блока, второй выход делителя частоты соединен со входами формирователя задающих импульсов и формирователя импульсов стробирования, выход которого подключен ко вторым входам первого усилителя, первого триггера и первого и второго дискретных фильтров, третьи входы кото;рых соединены с выходом формирователя информационных импульсов, выход регистра подключен к шестому входу вычислительного блока, а второй вход - ко второму выходу преобразователя длительности импульса ,в код. Третий выход которого соединен со вторым входом счетчика импульсов, второй вход - с выходом генератора счетных импульсов, а третий вход - со вторым выходом первого триггера и входом второго усилителя, выход которого подключен к седьмому входу вычислительного блока, вход второго дешифратора соединен со вторым выходом коммутатора, второй вход которого подключен к четвертому выходу вычислительного блока, выход третьего усилителя соединен со входом ультразвукового датчика, выход которого подключен к первому входу Первого усилителя.: 2. Устройство по п,1, о т л и а ю щ е е с я тем, что дискретный фильтр Содержит первый инвертор, последовательно соединенные первый элемент И, четвертый триггер и второй элемент И, последовательно соединенные пятый триггер, первый элемент ИЛИ, третий элемент И, шестой триггер И четвертый элемент И и последовательно соединенные второй инвер,тор, пятый элемент И и второй элемент ИЛИ, второй вход которого подключен к выходу четвертого элемента И, а выход - ко вторым входам четвертого триггера и пятого триггера, выход которого соединен со вторым входом второго элемента И, выход которого, подключен к соответствующему входу блока управления диапазоном дальности, выход формирог ватёля информационных импульсов соединен со вторыми входами пятого элемёнта И й шест6го триггера, а также с первым входом первого элемента И, второй вход которого и вход второго инвертора подключены к выходу соответствующего дешифратора, а выход формирователя импульсов стробирования соединен со вторым входом третьего элемента И и входом первого инвертора, выход которого подключен ко второму входу четвертого элемента И, выход четвертого триггера соединен с первым входом пятого триггера и вторым входом первого элемента ИЛИ. Источники информации. принятые во внимание при экспертизе 5 1.Интегральные poefiti-). Пол ред. Г.Е.Поздняка М, , Мир , , с;, 87, 2.Пелянин П.Н. Промышленные роботы. М., Машиностроение, 1975, стр. 365 (прототип).
