(54) ЛЕТУЧИЕ НОЖНИЦЫ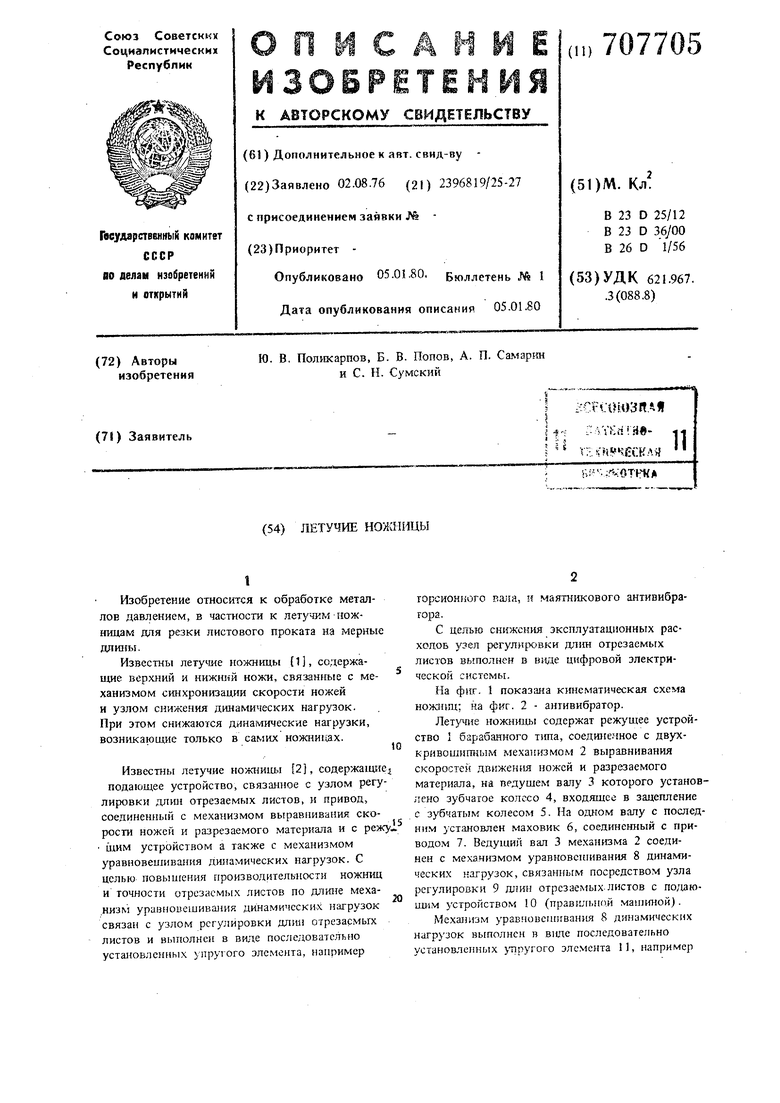

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления летучими ножницами, снабженными механизмом выравнивания скоростей | 1990 |
|
SU1712080A1 |
| Устройство для управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1685635A1 |
| Устройство управления летучими ножницами, работающими в режиме непрерывного вращения | 1988 |
|
SU1519855A2 |
| Цифроаналоговое устройство управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1712078A1 |
| Летучие ножницы | 1975 |
|
SU692195A1 |
| Устройство управления летучими ножницами ,работающими в режиме непрерывного вращения | 1987 |
|
SU1440627A1 |
| Маятниковые летучие ножницы | 1976 |
|
SU948562A1 |
| ЛЕТУЧИЕ НОЖНИЦЫ ДЛЯ РЕЗКИ ПРОКАТА | 1991 |
|
RU2019366C1 |
| КРИВОШИПНО-РЫЧАЖНЫЕ ЛЕТУЧИЕ НОЖНИЦЫ | 1972 |
|
SU343789A1 |
| КРОМКОКРОШИТЕЛЬНЫЕ НОЖНИЦЫ | 2000 |
|
RU2185937C2 |
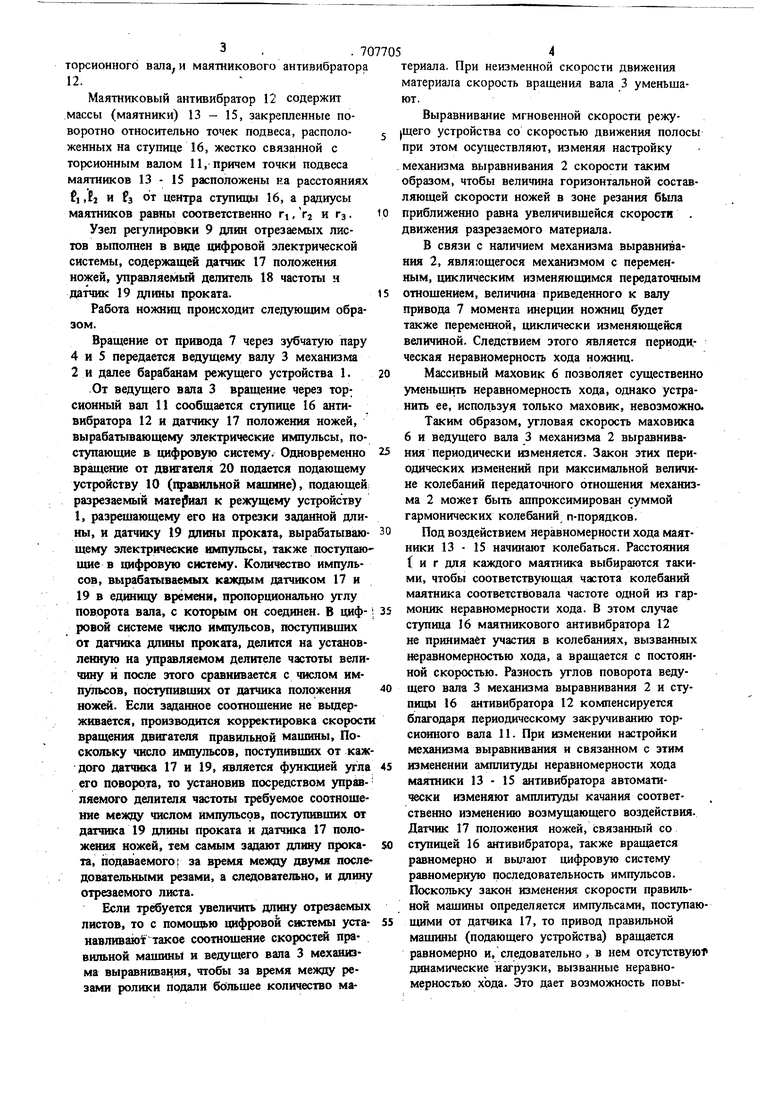
Изобретение относится к обработке металлов давлением, в частности к летучим ножницам для резки листового проката на мерные длины. Известны летучие ножницы {1, со.хержаuyie верхний и нижний ножи, связанные с механизмом синхронизации скорости ножей и узлом снижения динамических нагрузок. При зтом снижаются динамические нагрузки, возникающие только в самих ножни1щх. Известны летучие ножницы {2, содержащи подающее устройство, связанное с узлом регу лировки длин отрезаемых листов, и привод, соединенный с механизмом выравнивания скорости ножей и разрезаемого материала и с реж щим устройством а также с механизмом уравновешивания дшшмических нагрузок. С целью повышения производнтель-ности ножниц и точности отрезаемых листов по длине механизм уравновешивания динамических нагрузок связан с узлом регулировки длш отрезаемых листов и выполнен в виде пос;1едовательно установленных упругого элемента, например торсионного вала, н маятникового антинибрагора. С целью снижения эксплуатационных расходов узел регулировки длин отрезаемых листов вь полнен в цифровой электрической системы. На фт. 1 показана К1шематическая схема HOMiiru; на фкг. 2 - антнвибратор. Летх/чие ножни1Ш1 содержат режущее устройство 1 барабанного типа, соедшге;шое с двухкривошипным механизмом 2 выравнивания скоростей движения ножей и разрезаемого материала, на ведущем валу 3 которого установлено зубчатое колесо 4, входящее в зацепление с зубчатым колесом 5. На валу с последним установлен маховик 6, соединенный с приводом 7. Ведущий вал 3 механизма 2 соединен с механизмом уравновеиншания 8 динамических нагрузок, связанным посредством узла регулировки 9 длин отрезаемых, листов с подающим устройством 10 (прав1 льн( машиной). Механизм уравшиеппгвания 8 динамических нагрузок вь полнен в виде последовательно установленных пругого элемента 11, например торсионного вала, и маятникового антивибратора 12.Маятниковый антивибратор 12 содержит массы (маятники) 13 - 15, закрепленные поворотно относительно точек подвеса, расположенных на ступице 16, жестко связанной с торсионным валом 11, причем точки подвеса маятников 13 - 15 расположены ка расстояниях fi Ji и з от центра ступицы 16, а радиусы маятников равны соответственно TI , Vj и Гз. Узел регулировки 9 длин отрезаемых листов выполнен в виде цифровой электрической системы, содержащей датчик 17 положения ножей, управляемый делитель 18 частоты н датчик 19 ддины проката. Работа ножниц происходит следующим образом. Вращение от привода 7 через зубчатую пару 4 и 5 передается ведущему валу 3 механизма 2 и далее барабанам режущего устройства 1. От ведущего вала 3 вращение через торсионный вал 11 сообщается ступнце 16 антивибратора 12 и датчику 17 положения ножей, вырабатывающему злектрические импульсы, поступающие в цифровую систему. Одновременно вращение от двигателя 20 подается подающему устройству 10 (щ авильной машине), подающей разрезаемый мате|(1иал к режущему устройству 1, разрещающему его на отрезки заданной длины, н датчику 19 длины проката, вырабатывающему электрические импульсы, также поступающие в цифровую систему. Количество импульсов, вырабатываемых каждым датчиком 17 и 19 в единицу времени, пропорционально углу поворота вала, с которым он соедннен. В цифровой системе число импульсов, поступивщих от датчика длины проката, делится на установленную на управляемом делнтеле частоты величину и после зтого сравнивается с числом им пульсов, поступивщих от датчика положеиия ножей. Если заданное соотнощение не вьвдерживается, производится корректировка скорост вращения двигателя правильной мащииы. Поскольку число импульсов, поступивших от каж дого датчика 17 и 19, является функцией угла его поворота, то установив посредством управляемого делителя частоты требуемое соотношение между числом импульсов, поступивших от датчика 19 длины проката и датчика 17 положения ножей, тем самым задают длину проката, подаваемого; за время между двумя после довательными резами, а следовательно, и длину отрезаемого листа. Если требуется увеличить длину отрезаемых листов, то с помощью цифровой системы устанавливают такое соотношение скоростей правильной машины и ведущего вала 3 механизма выравнивания, чтобы за время между резами ролики подали большее количество маериала. При неизменной скорости движения материала скорость вращения вала 3 уменьшают. Выравнивание мгновенной скорости режущего устройства со скоростью движения полосы при этом осуществляют, изменяя настройку механизма выравнивания 2 скорости таким образом, чтобы величина горизонтальной составляющей скорости ножей в зоне резания бЫла приближенно равна увеличившейся скорости . движения разрезаемого материала. В связи с наличием механизма выравнивания 2, являющегося механизмом с переменным, циклическим изменяющимся передаточным отношением, величииа приведенного к валу привода 7 момента инерции ножниц будет также переменной, циклически изменяющейся величиной. Следствием этого является периоднческая неравномерность хода ножниц. Массивный маховик 6 позволяет существенно уменьшить неравномерность хода, однако устранить ее, используя только маховик, невозможно. Таким образом, угловая скорость маховика 6 и ведущего вала 3 механизма 2 выравнивания периодически изменяется. Закон этих периодических изменений при максимальной величине колебаний передаточного отношения механизма 2 может быть аппроксимирован суммой гармонических колебаний п-порядков. Под воздействием неравномерности хода маятники 13 - 15 начинают колебаться. Расстояния (иг для каждого маятника выбираются такими, чтобы соответствующая частота колебаний маятника соответствовала частоте одной из гармоник неравномерности хода. В этом случае ступица 16 маятникового антивибратора 12 не принимает участия в колебаниях, вызванных неравномерностью хода, а вращается с постоянной скоростью. Разность углов поворота ведущего вала 3 механизма выравнивания 2 и ступицы 16 антивибратора 12 компенсируется благодаря периодическому закручиванию торсионного вала 11. При изменении настройки механизма выравнивания и связанном с этим изменении амплитуды неравномерности хода маятники 13-15 антивибратора автоматически изменяют амплитуды качания соответственно изменению возмущающего воздействия. Датчик 17 положения ножей, связанный со ступицей 16 антивибратора, также вращается равномерно и выдают цифровую систему равномерную последовательность импульсов. Поскольку закон юменения скорости правильной машины определяется импульсами, поступающими от датчика 17, то привод правильной машины (подающего устройства) вращается равномерно и, следовательно , в нем отсутствуют динамические нагрузки, вызванные неравномерностью хода. Это дает возможность повысить скорость ножниц и точность длин отрезаемых листов.
Формула изобретения
Летучие ножницы, содержащие подающее устройство, связанное с узлом регулировки длин отрезаемых листов, и привод, соединенны с механизмом выравнивания скорости иожей и разрезаемого материала и с режущим устройством, а также смеханизмом уравновешивания динамических нагрузок, отличающиеся тем, что, с целью повышения производительности и точности отрезаемых лис хрв по длине, механизм уравновешивания динамических нагрузок связан с узлом регулировки длин отрезаемых листов и выполнен в виде последовательно установленных упругого элемента, например, торсиошюго вала, и маятникового антивибратора.
Источники информации, принятые во внимание при экспертизе
