Изобретение относится к многодвигательным электроприводам грузоподъемных машин, в частности к электроприводам механизмов поворота поворотных частей грузоподъемных кранов, преимущественно башенных кранов.
В практике в существующих электроприводах механизмов поворота башенных кранов широко используются асинхронные электродвигатели с фазным ротором. Для регулирования скорости вращения поворотной части крана в цепь ротора электродвигателя привода вводятся резисторы. Для повышения скорости вращения или для разгона электродвигателя последовательно закорачивают ступени резисторов в течение определенного периода времени. Для снижения скорости вращения используют режим торможения противовключением, для чего изменяют чередование фаз на статоре электродвигателя переводом командоаппарата в сторону, противоположную вращению ротора.
Из патентной документации SU известен двухдвигательный электропривод механизма поворота грузоподъемного крана с устройством управления электроприводом, содержащим две группы контакторов направления вращения двигателей и контакторы питания механических тормозов двигателей при их вращении, обмотки которых подключены к источнику питания через соответствующие контакты первого командоаппарата, причем устройство снабжено вторым командоаппаратом, выполненным с замыкающим и размыкающим контактами. Устройство управления содержит реле времени, обмотка которого включена последовательно с размыкающим контактом второго командоаппарата, и контактор управления, обмотка которого включена последовательно с замыкающим контактом реле времени и замыкающим контактом второго командоаппарата, замыкающие контакты контактора управления включены последовательно с обмотками контакторов питания механических тормозов, обмоткой первого контактора направления первой группы и обмоткой второго контактора направления второй группы. Первый командоаппарат имеет контакт его положения, посредством которого контакты контактора управления и второго командоаппарата подключены к источнику питания [1].
Из патентной документации GB известен двухдвигательный привод переменного тока машины, содержащий асинхронные электродвигатели, связанные с отдельными приводами, которые соединены для синхронной работы. При работе привода на конденсатор подается напряжение, когда главный регулятор скорости перемещается в первую прямую позицию, при этом тормоза выключаются, а конденсатор обеспечивает изменение однофазного питания статорной обмотки на трехфазное, причем контактор подсоединяет сопротивление ротора к контактным кольцам, сопротивление ротора уменьшается и происходит ускорение вращения электродвигателя. Привод содержит реле, срабатывающее при достижении определенной скорости, размыкает соответствующие контакторы так, что электродвигатели вращаются по инерции, а их статоры возбуждаются только от двух линий питания, причем при увеличении скорости реле срабатывает, регулируется сопротивление ротора для однофазного торможения. При низкой скорости торможение ослабляется за счет размыкания реле, а если вращения не происходит, то возбуждающая мощность используется для торможения с помощью повторного замыкания другого реле при соответствующей более низкой скорости, при этом синхронность работы электродвигателей поддерживается с помощью перекрестной связи роторов и статоров и однофазного возбуждения статоров. Когда достигается малая скорость, срабатывает одно реле, включающее тормоза и обесточивающее другое реле, а торможение обратным током может быть обеспечено при реверсивном положении регулятора [2].
Из патентной документации FR известен электропривод механизма вращения башенного крана, содержащий асинхронный двигатель, имеющий ротор с обмоткой, к которому присоединены средства контроля роторного тока, позволяющие изменять кривую характеристики «момент-скорость», тормозное устройство, соединенное с валом двигателя, момент которого возрастает с увеличением скорости, и соединенное также со средствами контроля тока возбуждения при изменении характеристики «момент-скорость», орган управления средствами контроля роторного тока двигателя, детектор скорости, передающий сигнал органу управления, орган контроля включения тормозного устройства, устройство регулировки напряжения, предварительно отрегулированный элемент, действующий на регулировочное устройство, и указатель скорости [3].
Наиболее близким техническим решением по сути и достигаемому эффекту к данному изобретению является электропривод с устройством его управления для перемещения грузоподъемного крана, при этом устройство содержит реверсивные контакторы, контакты которых включены в цепь питания обмотки статора асинхронного электродвигателя, в цепь питания обмотки ротора которого включены пускорегулирующие резисторы и тиристорный коммутатор, управляющий вход которого через пороговый элемент и распределитель импульсов связан с цепью обмотки ротора, командоконтроллер, контакты которого включены в цепи катушек реверсивных контакторов, контактора тормоза и контакторов ускорения, и датчик скорости, устройство снабжено реле памяти направления движения, катушки которых включены последовательно с соответствующими контактами командоконтроллера и реверсивных контакторов, дополнительным контактором, в цепь обмотки которого включен замыкающий контакт контактора тормоза, и тормозной педалью, размыкающий контакт которой включен в цепь питания упомянутых обмоток контакторов, а замыкающий - в цепь питания катушек реверсивных контакторов через соответствующие замыкающие контакты реле памяти, причем один замыкающий контакт контактора тормоза включен в цепь питания катушек реле памяти, катушек реверсивных контакторов через упомянутый замыкающий контакт тормозной педали и в цепь питания катушки контактора тормоза через размыкающий контакт датчика скорости, включенного в одну фазу тиристорного регулятора, в цепь другой фазы которого включен один замыкающий контакт дополнительного контактора, второй замыкающий контакт которого включен в цепь управления порогового элемента [4].
В практике при работе известных электроприводов возникают динамические моменты. Это связано с торможением противовключением электродвигателя механизма поворота вследствие того, что включенное в цепь ротора сопротивление выбирается исходя из обеспечения номинального тормозного момента на номинальной скорости, при этом во время работы привода командоаппарат устанавливается на первую позицию, а при переводе командоаппарата в другие позиции включаются контакторы ускорения и закорачиваются ступени резисторов в роторе, что приводит к большим динамическим ударным нагрузкам и поломкам механизмов.
С целью исключения указанных недостатков существующих конструкций электроприводов предлагается электропривод, имеющий средства запрещения включения контакторов ускорения при торможении противовключением в такой промежуток времени, когда скорость снижается до минимального значения.
Решаемой и достигаемой технической задачей данного изобретения является уменьшение динамических нагрузок в приводе, его износа, энергоемкости и повышение безопасности.
Поставленная техническая задача решается тем, что электропривод механизма поворота грузоподъемного крана содержит асинхронные электродвигатели с фазными роторами, электродвигатели гидротолкателей тормозов, командоконтроллер с цепями управления, соединенный с линией питания, с которой соединен блок управления электроприводом, имеющий контакторы правого и левого вращения, контакторы переключения ступеней скорости, контакторы ускорения, реле времени, реле памяти правого и левого вращения, а также цепь, составленную из датчика контроля скорости и реле частоты вращения, причем статорные обмотки электродвигателей с фазными роторами своими одноименными выводами соединены между собой и подключены к сети по схеме противовключения, в одну из фаз статорной обмотки каждого электродвигателя с фазным ротором включено реле максимального тока, каждый электродвигатель с фазным ротором снабжен блоком многоступенчатых резисторов, одни выводы каждого из которых соединены с соответствующими фазными выводами обмотки ротора электродвигателя, вторые выводы резисторов соединены в звезду через симисторы коммутатора, блок управления коммутаторами, составленный из двух мостовых выпрямителей, входы которых шунтированы контактами и подключены к выходам симисторных коммутаторов соответственно, индуктивный датчик контроля скорости вращения тормозного шкива привода, механически связанный с валом одного из электродвигателей с фазным ротором и электрически соединенный с линией питания командоконтроллера.
На фиг.1 показан электропривод механизма поворота грузоподъемного крана с устройством его управления, на фиг.2 - блок управления электроприводом и управляющий блок электропривода, на фиг.3 - таблица включения электропривода с условно показанными на ней элементами привода.
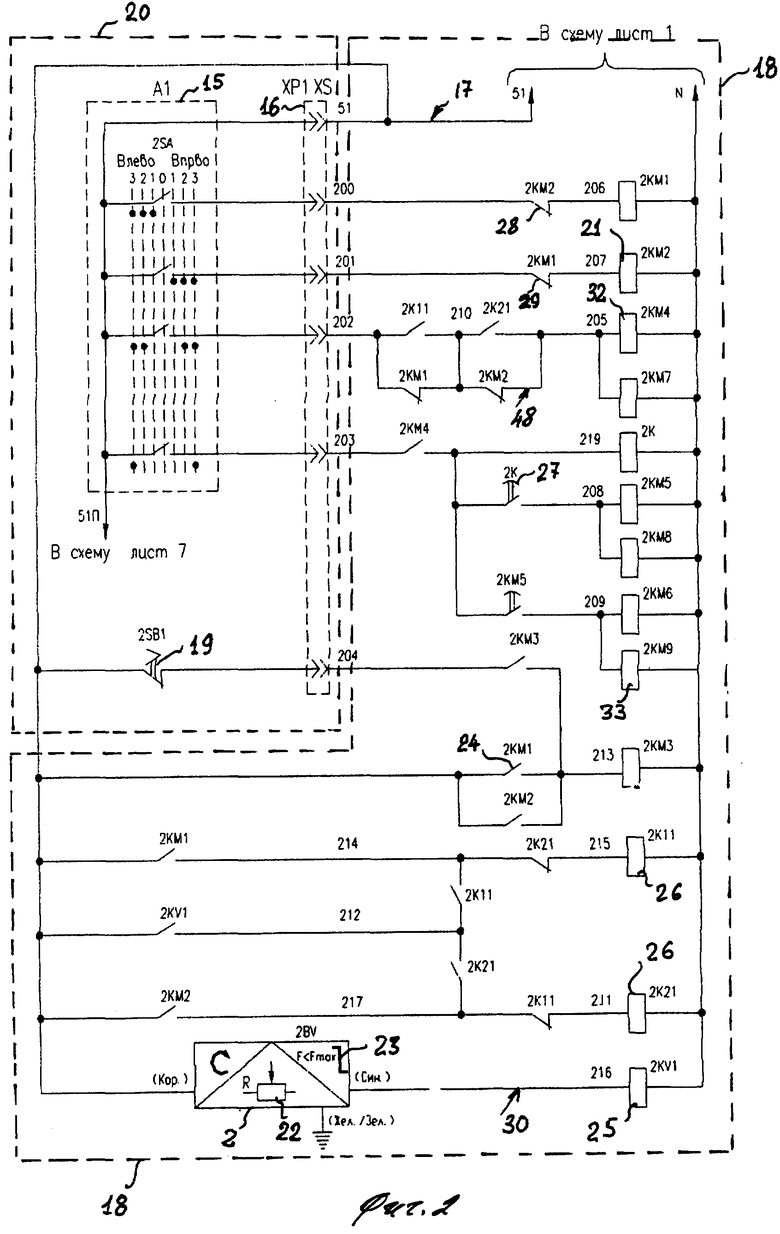
Устройство управления содержит электрически соединенные между собой асинхронные электродвигатели 1 (фиг.1) с фазными роторами, с одним из которых связан индуктивный датчик 2 контроля скорости вращения вала электродвигателя, блок 3 резисторов 4, симисторы 5 двух коммутаторов 6 переменного тока, выпрямительные мосты 7 на диодах, блок 8 сравнения, задающий резистор или потенциометр 9 блока 8 сравнения, при этом блок 8 сравнения через выпрямительные мосты 7 соединен с коммутаторами 6. Блок 3 резисторов имеет контакторы 10.
Электропривод имеет реле 11 максимального тока, каждое из которых включено в цепь питания соответствующего электродвигателя 1. Электродвигатели 1 через контакторы 12 соединены с электродвигателями 13 привода гидротолкателей 14 тормозов механизма поворота.
На фиг.2 показан командоконтроллер 15, соединенный разъемами 16 с линией 17 питания управляющего блока 18. Командоконтроллер 15 и педаль 19 включения тормоза входят в состав блока 20 управления электроприводом, который на фиг.2 на ее левой части показан пунктирными линиями.
Показанный другими пунктирными линиями, на правой части фиг.2, управляющий блок 18 содержит катушки 21 контакторов, регулирующий резистор, в частности потенциометр 22, уставку 23 датчика 2 минимальной скорости, контакты 24 и подобные им контакты, реле 25, две катушки 26 реле памяти направления вращения, одна из которых, верхняя катушка 2К11 на фиг.2, является катушкой правого направления вращения поворотной части крана, а вторая катушка 2К21 является катушкой левого направления поворотной части крана. Управляющий блок 18 содержит также контакт 27 с выдержкой времени, нормально закрытые контакты 28 и 29 и другие подобные им контакты, цепь 30 с включенным в нее датчиком 2 контроля скорости, контактор 31 тормоза, условно показанный на таблице фиг.3, катушки 32 и 33 контакторов (фиг.2) и другие подобные им катушки, не имеющие цифровых позиций на фиг.2. Катушки 32 и 33 и расположенные между ними катушки или все катушки 2КМ4-2КМ9 контакторов, показанные на фиг.2, являются катушками контакторов ускорения. С этими катушками соединены соответствующие контакторы, которые показаны условно на таблице фиг.3 и упомянуты ниже.
На фиг.1 также условно показаны тормозные шкивы 34 привода механизма поворота, взаимодействующие с тормозами 35, связанными с гидротолкателями 14, которые соединены с электродвигателями 13 электропривода. Коммутаторы 6 соединены с резисторами 4 и образуют собой блок 36 коммутаторов, а выпрямительные мосты 7 с потенциометром 9 образуют блок 37 управления коммутаторами, который соединен с последними.
Управляющий блок 18 (фиг.2) соединен с линией 17 питания командоконтроллера. Статорные обмотки электродвигателей 1 с фазными роторами одноименными выводами соединены между собой и через контакторы 38 (фиг.1) подключены к сети по схеме противовключения. Упомянутые реле 11 максимального тока включены в одну из фаз статорной обмотки каждого электродвигателя 1 с фазным ротором, и эти реле 11 соединены между собой. Резисторы 4 электропривода 1 одними своими выводами соединены с соответствующими фазными выводами обмоток роторов электродвигателей 1, а вторыми выводами резисторы 4 соединены в звезду через симисторы 5 коммутаторов 6. В блоке 37 управления симисторами 5 входы двух мостовых выпрямителей 7 шунтированы контактами 39 и подключены к выходам симисторных коммутаторов 6 соответственно. Индуктивный датчик 2 контроля скорости вращения тормозного шкива привода электромагнитным путем связан с валом одного из электродвигателей с фазным ротором и электрически соединен с линией 17 питания командоконтроллера 15.
Электропривод содержит контакторы 40 и 41 правого и левого вращения (фиг.3), контакторы 42 переключения ступеней скорости, контакторы 43 ускорения, реле 44 времени и реле 45 и 46 памяти соответственно правого и левого вращения, а также реле 47 частоты вращения. Цепь 30 (фиг.2) состоит из потенциометра 22, датчика 23 минимальной скорости и реле частоты вращения (фиг.3). Позицией 48 на фиг.2 показана цепь питания катушек блока управления электроприводом.
Работает устройство следующим образом.
Включают командоконтроллер 15 (фиг.2) влево или вправо, при этом включается катушка 21 верхнего или нижнего контактора в зависимости от выбранного оператором направления поворота поворотной части крана и направления вращения вала электродвигателя. При включении в работу одного из электродвигателей 1 включаются в работу тормоза 35 (фиг.1), которые растормаживают электропривод, одновременно с этим получает питание верхняя или нижняя на фиг.2 катушка 26 и включается соответствующий контактор 40 или 41 правого или левого направления вращения. При дальнейшем переключении командоконтроллера 15 в соответствующие позиции «2» и «3» с выдержкой времени включаются контакторы ускорения 43 и происходит разгон электродвигателя 1. При достижении скорости, соответствующей значению уставки 23 датчика 2 минимальной скорости, включается соответствующий контакт и реле 47 частоты вращения замыкает свой контакт в соответствующей цепи, устанавливая верхнюю катушку 26 (2К11) на самопитание. Для осуществления торможения необходимо перевести рукоятку командоконтроллера 15 в противоположную сторону. При этом размыкается соответствующая цепь питания и теряют питание катушки 32 и 33, срабатывают контакторы и происходит торможение электродвигателя 1 противовключением с полностью введенным в работу сопротивлением в цепи ротора этого электродвигателя.
При снижении скорости вращения до значения, соответствующего ниже значения уставки 23 датчика 2 минимальной скорости, теряет питание реле 25 и разрешает по цепи 48 включение катушек 32 и 33 и соответствующих им контакторов.
Второй вариант работы. При установке рукоятки командоконтроллера 15 в положение «влево» (фиг.2) включается контактор 38 направления 2КМ1 (фиг.1). Статор электродвигателя 1 подключается к сети, при этом в его ротор введено полное сопротивление. Электродвигатель 1 начинает питание верхней на схеме (фиг.2) катушки 26 реле памяти (2К11). При дальнейшем переводе рукоятки командоконтроллера влево происходит закорачивание ступеней резисторов 4 блока 3 (фиг.1) в роторе электродвигателя 1 и его разгон прекращается. При этом происходит питание катушек 32 и 33 контакторов 43 ускорения через замкнутый контакт 2К11 (фиг.2) и нормально закрытый контакт 28 (2КМ2). При достижении скорости, соответствующей положению уставки 23 датчика 2, замыкается внутренний контакт датчика 2 (фиг.1) и он получает питание от реле 25 (2KV1). Это реле замыкает свой контакт 2К11 в цепи самоподхвата.
Для торможения противовключением переводят рукоятку командоконтроллера 15 в противоположное положение (фиг.2), причем номер позиции перевода рукоятки в данном случае не принципиален. Включается катушка 2КМ2 контактора, но реле памяти 46 (2К11) остается включенным через собственный контакт и контакт реле 25 (2KV1). Реле памяти 46 (2К21) включится не может из-за наличия взаимоблокировки реле памяти 45 и 46 (2К11 и 2К21). Подключению катушек 32 контакторов ускорения 43 (2КМ4 и 2КМ7) препятствуют разомкнутые контакты 2КМ2 и 2К21. При снижении скорости ниже уставки датчик 2 скорости размыкает свой встроенный контакт, теряет питание реле 25 (2KV1) и разрывает цепь самоподхвата контакт 2К11. При этом контакт 2К11 теряет питание и через свой нормально замкнутый контакт включает реле памяти 46 (2К21). Контакторы 43 ускорения получают питание через контакты 2КМ1 и 2К21. В этом положении оператор может установить командоконтроллер 15 в нулевое положение для остановки электродвигателя или продолжить движение (вращение электродвигателя 1) в противоположную сторону.
Источники информации
1. SU 1357340 A, 07.12.1987.
2. GB 1178454 A, 18.04.1968.
3. FR 2067426 A, 24.09.1971.
4. SU 1805093 A1, 07.12.1987 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| Устройство для управления лебедкой | 1981 |
|
SU981196A1 |
| Устройство для управления грузоподъемным механизмом | 1985 |
|
SU1384538A1 |
| УСТРОЙСТВО ИМПУЛЬСНО-КЛЮЧЕВОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2249296C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИМПУЛЬСНО-КЛЮЧЕВЫМ КОММУТАТОРОМ | 2002 |
|
RU2249297C2 |
| Двухскоростной электропривод | 1982 |
|
SU1042148A1 |

Изобретение относится к многодвигательным электропиводам грузоподъемных машин. Предложенный электропривод содержит асинхронные электродвигатели с фазными роторами, электродвигатели гидротолкателей тормозов, командоконтроллер с цепями управления, соединенный с линией питания. С последней соединен блок управления электроприводом, имеющий контакторы правого и левого вращения, контакторы переключения ступеней скорости, контакторы ускорения, реле времени, реле памяти правого и левого вращения, а также цепь, составленную из датчика контроля скорости и реле частоты вращения. Статорные обмотки электродвигателей с фазными роторами своими одноименными выводами соединены между собой и подключены к сети по схеме противовключения. В одну из фаз статорной обмотки каждого электродвигателя с фазным ротором включено реле максимального тока. Каждый электродвигатель с фазным ротором снабжен блоком многоступенчатых резисторов, одни выводы каждого из которых соединены с соответствующими фазными выводами обмотки ротора электродвигателя, вторые выводы резисторов соединены в звезду через симисторы коммутатора. Блок управления коммутаторами составлен из двух мостовых выпрямителей, входы которых подключены к выходам симисторных коммутаторов соответственно и шунтированы контактами с обеспечением запрещения включения контакторов ускорения при торможении противовключением асинхронных электродвигателей в промежуток времени, соответствующий снижению скорости до минимального значения. Индуктивный датчик контроля скорости вращения тормозного шкива привода механически связан с валом одного из электродвигателей с фазным ротором и электрически соединен с линией питания командоконтроллера. Электропривод характеризуется пониженными динамическими нагрузками, а также уменьшенными износом и энергоемкостью. 3 ил.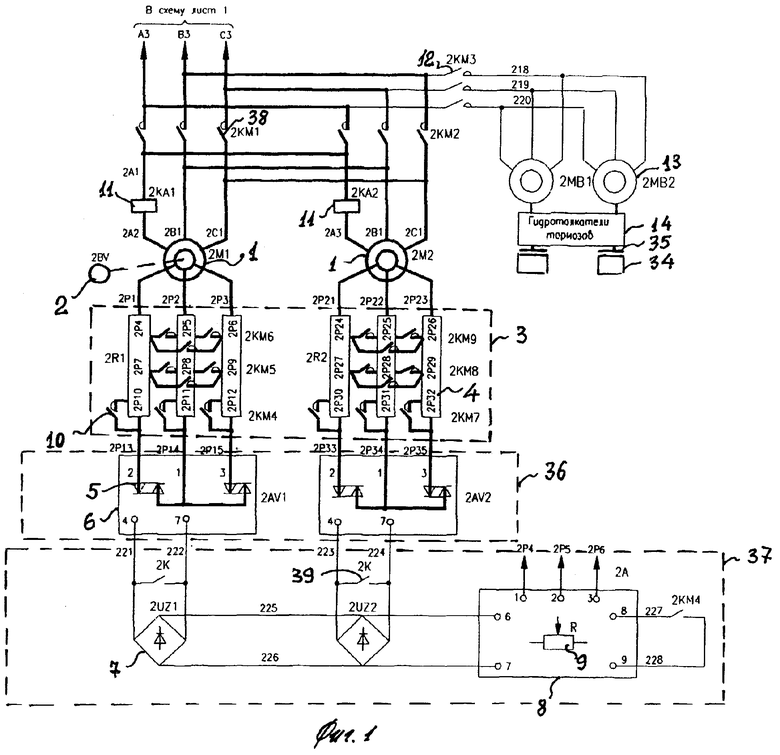
Электропривод механизма поворота грузоподъемного крана, содержащий асинхронные электродвигатели с фазными роторами, электродвигатели гидротолкателей тормозов, командоконтроллер с цепями управления, соединенный с линией питания, с которой соединен блок управления электроприводом, имеющий контакторы правого и левого вращения, контакторы переключения ступеней скорости, контакторы ускорения, реле времени, реле памяти правого и левого вращения, а также цепь, составленную из датчика контроля скорости и реле частоты вращения, причем статорные обмотки электродвигателей с фазными роторами своими одноименными выводами соединены между собой и подключены к сети по схеме противовключения, в одну из фаз статорной обмотки каждого электродвигателя с фазным ротором включено реле максимального тока, каждый электродвигатель с фазным ротором снабжен блоком многоступенчатых резисторов, одни выводы каждого из которых соединены с соответствующими фазными выводами обмотки ротора электродвигателя, вторые выводы резисторов соединены в звезду через симисторы коммутатора, блок управления коммутаторами, составленный из двух мостовых выпрямителей, входы которых подключены к выходам симисторных коммутаторов соответственно и шунтированы контактами с обеспечением запрещения включения контакторов ускорения при торможении противовключением асинхронных электродвигателей в промежуток времени, соответствующий снижению скорости до минимального значения, индуктивный датчик контроля скорости вращения тормозного шкива привода, механически связанный с валом одного из электродвигателей с фазным ротором и электрически соединенный с линией питания командоконтроллера.
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| Многодвигательный электропривод переменного тока | 1980 |
|
SU1023609A1 |
| Многодвигательный электропривод | 1979 |
|
SU773890A1 |

