; ;1 : ;- / - ; . Изобретение относится к области измерения .электрических величин и может быть использовано при разрабо ке быстродействующих преобразователей частоты следования импульсов в цифровой код для измерительных систем с частотным представлением первичных сигналов. Известен способ измерения частот следования импульсов, при котором подсчитывают число целых периодов измеряемой частоты, попавизих в интервал измерения, и определяют ве-. личины дробных частей периодов, прилегающих к началу и к концу.инте вала измерения, а значение измеряем частоты вычисляют по формуле . N -I Hilbi, . «. где Ы - число целых периодов в интервале измерения; H-(Ki - величина дробных частей периодов; TU - интервал измерения 1. йаиболее-близким техническим реш нием к данному изобретению является способ измерения частоты следования импульсов, при котором в каждом из соприкасающихся интервалов измерения Ти подсчитывают число целых периодов Ni и определяют величину дробной части&U периода, прилегающей к началу каждого интервала измерения, а значение измеряемой частоты на 1-м интервале измерения вычисляют по формуле {2 . -.tlilitlilll siiL.. : . . Недостатком известных способов яв,ляется наличие методической погрешности усреднения при измерении изменяющейся во времени частоты. В известных способах величина дробной части периода вычисляется, как отношение измеренных длительностей соответствующей дробной части периода и всего периода где tt и t(j - длительность дробных частей периода, прилегающие слева и справа к началу интервала измерения. При изменении частоты в окрес.тности начала интервала измерения деист Б ®р11а1 ЕГе шчина дрЬбной ча б личается от вычисленной по формуле и приводит к погрешности усред-, нения. .
Целью изобретения является повы шение точности измерения иэмёняюшейся частоты следования импульсов.
Поставленная цель достигается тем, что в способе измёрениячастоты следования импульсов, основанном на подсчете числа целых периодов и определении длительностей дробных частей периодов измеряемой частоты, пойавшиз в интервал измерения, до;поянит(гльно измеряют длительность последнего целого периода в каждом интервале измерения, а величины iacтeй пёриодбв определяют по с Соотношению
fc-K -4Ci-i
iaiil
rrct.t .
H Пч/Чн к iM Ькг.
MM -HI I. 1- H KM H Где ukHJ величина дробной части
периода в i-ом интервале измерения;
tni - длительность дробной части периода, следующая после начала i-ro интервала : измерения;
t - длительность дробной части, периода, предшествующего н.ачалу 1-го интерва. ла измерения;
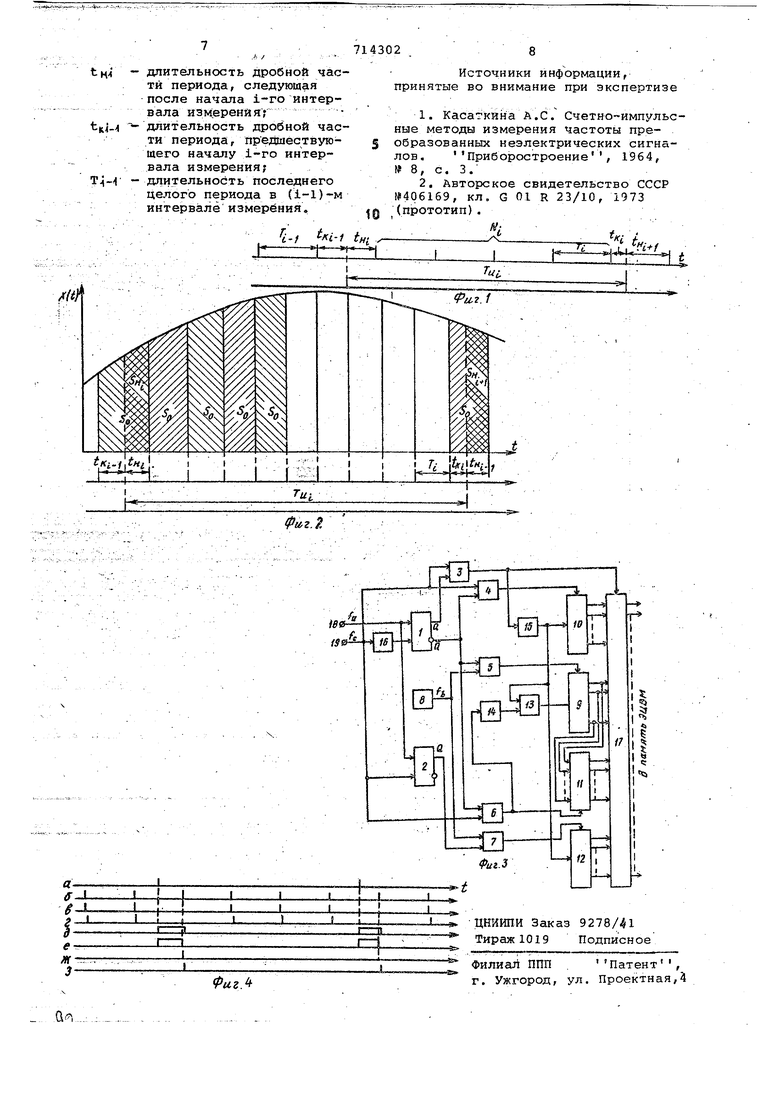
длительность последнего целого периода в (1-1)-м интервале измерения. На фиг. 1 и 2 представлены временные диаграммы, поясняющие сущность способа измерения частоты следования импульсов; на фиг. 3 - изображена структурная электрическая: схема устроЙс1Ва рёалйэуюшего способа; на фиг. 4 - временная ди аграмма его работы.
Устройство для ввода частотных сигналов в память ЭЦВМ (фиг.3) выполнено на логических элементах исодержит триггеры 1,2 - управляющие работой всего устройства, элементы И 3-7, генератор импульсов высокой частоты (импульсов .t|,)8, используемых при измерении инте эвалов времени Т, tK, fen, счетчик 9 для измерения Т и tK., счетчик 10 числа целых периодов N, регистр памяти 11 для запоминания содержимого счету1ика 9 (длительности Т), счетчик 12 для измерения tbf, элемент ИЛИ 13, эле- . меяты задержки 14-16, блок считывания 17 в память ЭЦВМ, входная шина 18, по которой поступают импульсы, определяющие соприкасающиеся интервалы измерения Ту (импульсы ц) , й вхЬдная шина 19 частотного сигнала (импульсы fc ). V
В йзМерйтёльньох системах с частотным представлением первичных сигналов наиболее широкое распространение получили линейные частотно714302
импульсные модуляторы первичного исследуемого сигнала x(t). Два соседних импульса, генерируемых линейным модулятором, отсекают постоянные площади So, ограниченные осью времени и сигналом x(t) (фиг.2). При измерении частоты линейного мод лятора на интервале времени TU наиболее информативным результатом измерения будет такой, при котором полученное значение частоты, усредненноена интё 5йс ле Тц, будет пропорционально среднему значению-сигнала X(t) на этом интервале. Из фиг .2 видно, что указанная плошадь равна величине
Та 5„Г5иЫ- : Разделив Последнее выражение на SaTuf получим формулу для точного значения частоты, пропорционajibHoro среднему значению сигнала x(t) на интервале TU
j - ;- --SHJ/V H; /S.
j- -.. I - - 1 I
Следовательно, дробные части периодовЛц должны быть найдены, как отношение соответствующих площадей
--.
liu - е
При известном способе измерения они находятся, как соотношение временных интервалов
/,.-
IB случае изменяющегося сигнала x(t) величинайн не равна величине Cin , что приводит к погрешности усреднения. .
Покажем, что дополнительное измерение длительности периода Т- (фигЛ, 2)- и вычисление величины дробной (Части периода по формуле, это принято в настоящем изобретении, устраняет погрешность усреднения.
Для систем с частотной модуляцибй выполняется неравенствоT+t -bt T i.
где Тпии - период наиболее высокочастотной полезной составляю щей, спектра модулирующего сигнала x(t) .
Поэтому с достаточной для пpaктики точностью сигнал X (t) в пределах интервала Tfttc -tK можно считать линейно-изменяющимсяx(t),
где х - знач,ение сигнала x(t) , соответствующее середине интервала Т;
а - скорость изменения сигнала x(t).
С учётом предыдущей формуль
)H
) S. где xj. - значение входного сигнала
соответствующее середине интервала ta. tH . Очевидно, что
...
Тогда получаем
« тёе7 ;нТ5Т7Ту
После простых преобразований найдем истинную величину дробной части периода &Ц1 в 4-м интервалеизмерения,/ . . .
Следовательно, дробная часть, как это принятср в настоящем изобретении, определяется как отнсшение площадей, чем устраняется погрешност усреднения, в результате повьшается точность измерения изменяющейся частоты следования импульсов.
Длительность Т, tx, и tn измеряются в устройстве методом счета импульЪов f-t высокочастотного генератора за соответствующие промежутки времени. - .
В исходном состоянии устройства триггеры 1 и 2 установлены в О. С выхода Q триггера 1 при этом подается разрешение на элементы 4, 5 и 6. Импульсы fb от генератора 8, поступают через элемент 5 на вход счетчика 9, При подаче на входные шины 18 и 19 импульсов ц и fc (фиг.4 а,б), импульсы fc через элемент 4 поступают на вход счетчика 10 Кроме того, каждый импульс f, поступая через элемент 6, на вход записи, регистра памяти 11, организует считывание информации со счетчика 9 в регистр памяти (фиг.4 в). Проходя далее через элемент 14 и элемент ИЛИ 13 на установочный вход счетчика 9, импульс fс, устанавливает его в О (фиг. 4 г). В результате каждый импульс вызывает перепись информации о длительности закончившегося периода измеряемой частоты в регистр памяти 11, обнуление счетчика 9 и повторный счет импульсов f-b счетчиком 9. С приходом первого импульса fq по шине 18 триггера 1 и 2 устанавливаются в (фиг. 4 д,е), чем снимается разре- . шение с элементов 4 (конец счета N), 5 (конец измерения tK) и 6 (запреше,нйе переписи информации со счетчика 9 в регистр памяти 11). одновременно подается разрешение с выхода Q триггера 2 на элемент , через который импульсы {, поступают на вход счетчика 12 (начало измерения t«). С выхода Q триггера 1 подается разрешение на элемент 3. Первый После импульса f, импульс fc устанавливает триггер 2 в О, чем снимается разрешение с элемента 7 (конец измерения Ьц). Этот же импульс, проходя через элемент 3 на считьшаюцшй вход блока 17, организует перепись
информации со счетчиков 9, 10, 12 и регистра памяти 11 в ячейку памяти ЭЦВМ) (фиг. 4 ж), затем через элемент задержки 15 обнуляет счетчики 10 и 12 и через элемент ИЛИ 13 счетчик 9 (фиг. 4 з). Импульс fg .поступает также через элемент задержки 16 на один из входов триггера 1 и устанавливает его в О. Далее производится счет N, измерение Т и tic в следующем интервале измерения,
0 и так далее.
Таким образом, в каждую ячейку памяти ЭЦВМ записывается информация о величинах N-i, Т , t , tn-i+i (код частоты). После ввода частотного
s сигнала в ЭЦВМ выполняется обработка полученного массива кодов - вычисление значений &н и дискретных значений измеряемой частоты.
Использование настоящего изобре0тения позволяет существенно повысить точность измерений в системах с частотным представлением динамических сигналов. Повышение точности определения величин дробных частей пе5риодов соответственно увеличивает точность измерения частоты следования импульсов.
Изобретение оказывается также эффективным в случае предваритель0ной записи частотных сигнсшов совместно с сигналом fui на магнитную ленту. Известно, что запись и воспроизведение сопровождаются колебаниями скорости магнитной ленты, вы5зывающими паразитную частотную модуляцию при прохождении сигнала через тракт магнитной записи. Данный способ измерения существенно уменьшает погрешности усреднения и более эф0фективно подавляет, паразитную частотную модуляцию, вызванную нестабильностью движения магнитной ленты.
Формула изобретения
Способ измерения частоты следования i импуль,сов,основанный на подсчете чйс. ла целых периодов и определении длительностей дробных частей периодов измеряемой частоты, попавших в интервал измерения, отличающийс я тем,, что, с целью повыпения точности измерения изменяющейся частоты, дополнительно измеряют длительность последнего.целого периода в каждом интервале измерения, а величины дробных -частей периодов определяются по соотношению
- -fcHJ r,,-fc.JH(T}.rt.;-rtKO,
t,./% tTTTTrXr-Tt-T-j
&
Н
- величина дробной части
где АН периода в i-м интервале измерения;
| название | год | авторы | номер документа |
|---|---|---|---|
| Умножитель частоты следования импульсов | 1986 |
|
SU1345305A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ С ОГРАНИЧЕННЫМ СПЕКТРОМ (ВАРИАНТЫ) | 2004 |
|
RU2265278C1 |
| Устройство для дифференцирования частотно-импульсных сигналов | 1977 |
|
SU732904A1 |
| Устройство для коррекции расхода вещества по температуре и давлению | 1981 |
|
SU1027702A1 |
| Умножитель частоты | 1990 |
|
SU1797113A1 |
| Устройство для измерения динамических характеристик | 1983 |
|
SU1168902A1 |
| Устройство для измерения частоты электрического сигнала | 1987 |
|
SU1509753A1 |
| Цифровой фазометр-частотомер | 1983 |
|
SU1173342A1 |
| Способ измерения временных процессов в образцах | 1990 |
|
SU1829007A1 |
| Цифровой измеритель скважности прямоугольных импульсов | 1981 |
|
SU995063A1 |
